Модель переходных
процессов в
манипуляторе
МРЛ-901П
Анализ переходных
процессов в
манипуляторе
МРЛ-901П
Определение
жесткости
звеньев манипулятора
МРЛ-901П
Методика
проведения
эксперимента
по определению
механических
характеристик
манипулятора
МРЛ-901П
Время перемещения
рабочего органа
манипулятора
при малых расстояниях
между рабочими
точками
Программа
для вычисления
параметров
переходного
процесса портального
манипулятора
Особенности
управления
созданием НТП
в условиях
рынка
Формы финансирования
НИР и ОКР в условиях
рынка
Правовая
защита производителей
НТП
Расчет текущих
затрат на создание
программного
изделия (себестоимости)
Расчет эксплуатационных
затрат
Расчет условно-годового
экономического
эффекта и срока
окупаемости
Навигация
Анализ переходных процессов в манипуляторе МРЛ-901П
Построение и исследование динамической модели портального манипулятора
80670
знаков
142
таблицы
306
изображений
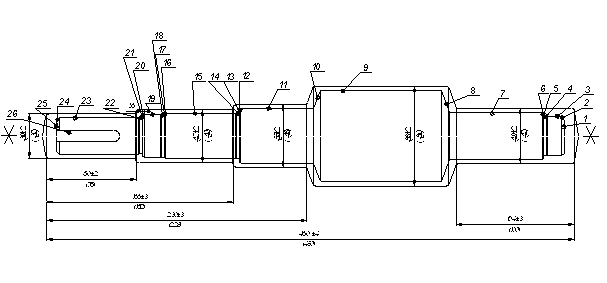
2.2 Анализ переходных процессов в манипуляторе МРЛ-901П
Источниками возникновения переходных процессов в манипуляторе МРЛ-901П являются: зубчатая ременная передача линейного модуля манипулятора и его свободная консоль.
На этапе зондирующих экспериментов исследовались парные зависимости коэффициента демпфирования от натяжения зубчатого ремня и смещения рабочего органа вдоль консоли. Результаты анализа полученных осциллограмм сведены в таблицы 2.1 и 2.2.
Анализ результатов показывает, что натяжение зубчатого ремня существенным образом влияет на коэффициенты демпфирования модуля линейного перемещения: так при увеличении начального натяжения ремня от минимального значения = 0,03778 до максимального = 0,00667 (в исследуемых приделах) коэффициент демпфирования уменьшается в 3 раза. Таким образом, можно сделать вывод о том, что демпфирование линейного модуля с зубчатой ременной передачей может задаваться и варьироваться в широких пределах, как на этапе конструирования, так и в процессе его эксплуатации.
| Табл. 2.1 | |||||
| Результаты анализа осциллограмм собственных колебаний рабочего органа манипулятора МРЛ-901П на консоли | |||||
| Величина смещения рабочего органа вдоль консоли ly, мм | Период колебаний рабочего органа T, с. | Частота колебаний , с-1 | Логарифмический декремент затухания | Коэффициент демпфирования кг/c | Время затухания колебаний tп.п., с. |
| 0 | 0,057 | 17,54 | 0,956 | 369 | 0,6 |
| 175 | 0,067 | 15 | 0,693 | 227,55 | 0,9 |
| 350 | 0,08 | 12,5 | 0,446 | 122,65 | 1,2 |
Анализ результатов исследований показывает, что смещение рабочего органа манипулятора МРЛ-901П вдоль свободной консоли, также как и
| Табл. 2.2 | ||||||||||
| Результаты исследований демпфирующих свойств модуля линейного перемещения с ременной передачей | ||||||||||
Номер опыта | Номер параллельного опыта | Случайный порядок проведения | Степень начального натяжения | Период колебаний Т, с. | Логарифмический декремент затухания | Коэффициент демпфирования кг/c | Среднее время затухания | |||
| опытов | ремня | парал-лельные опыты | среднее | парал-лельные опыты | среднее | парал-лельные опыты | среднее | колебаний tп.п., с | ||
| 1 | 3 | 0,1 | 1,15 | 460,15 | ||||||
| 2 | 1 | 0,102 | 1,23 | 482,35 | ||||||
| 1 | 3 | 12 | 0,03778 | 0,113 | 0,105 | 1,383 | 1,253 | 489,72 | 477,33 | 0,4 |
| 4 | 7 | 0,108 | 1,258 | 465,91 | ||||||
| 5 | 11 | 0,102 | 1,244 | 488,52 | ||||||
| 1 | 4 | 0,125 | 0,85 | 272,12 | ||||||
| 2 | 15 | 0,128 | 0,815 | 254,68 | ||||||
| 2 | 3 | 10 | 0,02 | 0,117 | 0,12 | 0,756 | 0,8 | 258,3 | 266,67 | 0,45 |
| 4 | 9 | 0,115 | 0,79 | 275,08 | ||||||
| 5 | 14 | 0,115 | 0,789 | 273,17 | ||||||
| 1 | 6 | 0,12 | 0,486 | 162,11 | ||||||
| 2 | 5 | 0,12 | 0,493 | 164,25 | ||||||
| 3 | 3 | 3 | 0,0067 | 0,132 | 0,128 | 0,496 | 0,504 | 150,32 | 157,47 | 0,6 |
| 4 | 8 | 0,14 | 0,544 | 155,43 | ||||||
| 5 | 2 | 0,128 | 0,5 | 155,24 | ||||||
увеличение начального натяжения ремня, вызывает уменьшение коэффициентов демпфирования, что существенно (в 2…3 раза) увеличивает время полного затухания собственных колебаний рабочего органа (см. табл. 2.1 и 2.2), и, как следствие снижает реальную производительность.
Смещение рабочего органа относительно основания и увеличение натяжения ремня приводит также к уменьшению частоты собственных колебаний манипулятора, что должно учитываться при использовании его в технологических процессах, связанных с резонансными явлениями.
Комплексные исследования демпфирующих свойств манипулятора осуществлялись с целью установления численной зависимости коэффициента демпфирования от величины начального натяжения ремня и смещения рабочего органа вдоль консоли. В качестве функции отклика выбиралась линейная модель. База данных для построения плана экспериментов сведена в табл. 2.
Основные уровни и интервалы варьирования выбирались на основе результатов зондирующих экспериментов, а также исследований жесткости и точносных параметров манипулятора МРЛ-901П.
| Табл. 2.3 | ||||
| База данных для построения плана экспериментов | ||||
Наименование фактора | Условное обозначение | Область определения | Основной уровень | Интервал варьирования |
| Начальное натяжение ремня | X1 | 0...0,04 | 0,02 | 0,013 |
| Величина смещения рабочего органа манипулятора вдоль консоли ly, мм | X2 | 0...350 | 175 | 175 |
Матрица планирования и результаты экспериментов сведены в табл. 2.4.
Проводилась полная статистическая обработка результатов экспериментов, позволившая получить адекватную модель зависимости коэффициентов демпфирования от исследуемых факторов в виде:
|
| (2.34) |
Поверхность отклика представлена на рис. 2.2. Выражение (2.34) позволяет получить численное значение коэффициента демпфирования, необходимое для расчета продолжительности переходного процесса при позиционировании.
| Табл. 2.4 | ||||||||
| Матрица планирования и результатов экспериментов по комплексному исследованию демпфирующих свойств манипулятора МРЛ-901П | ||||||||
Номер опыта |
|
|
|
| Среднее значение коэффициента демпфирования, кг/c | Дисперсия среднего арифметического | Вычисленное значение | |
| 1 | +1 | +1 | +1 | +1 | 240 | 64 | 240 | |
| 2 | +1 | +1 | -1 | -1 | 700 | 49 | 700 | |
| 3 | +1 | -1 | +1 | -1 | 65 | 4 | 65 | |
| 4 | +1 | -1 | -1 | +1 | 157 | 16 | 157 | |
Экспериментальные исследования времени переходного процесса осуществлялись при помощи комплекта виброизмерительной аппаратуры АВ-44, вибродатчик которой крепился на рабочем органе манипулятора.
Похожие работы
... уменьшение времени перемещения, что можно использовать на операциях с низким требованием к точности, хотя это уменьшение весьма не значительное. 4. Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в ...
... рабочей позиции, фиксацию устройства или спутника на рабочей позиции оформляются в виде таблицы 3.1. В данной работе предлагается разработка автоматической линии для осуществления той части техпроцесса, которая связана со сверлильной и фрезерной обработкой поверхностей и отверстий. Таким образом, проектируемая линия должна обеспечивать указанную в задании производительность. Для этого произведем ...
... за две-три недели. Во время обследований необходимо избегать нарушений в работе других видов транспорта четкой координацией управления ими. Изучение пассажиропотоков позволяет выявить основные закономерности их колебания для использования результатов обследований в планировании и организации перевозок. Иначе говоря, характер изменения пассажиропотоков на маршрутах и в целом по конкретному ...

... системой ЧПУ и обеспечивает надежную работу также в условиях безлюдного производства. При этом предотвращаются повреждения шпинделя и тем самым ненужные дорогостоящие простои. высокоскоростной механический обработка инструмент шпиндель Рис. 2. Порядок точности – единицы μ обеспечивается датчиком (1) для измерения аксиального смещения вала шпинделя; 2 – датчик измерения температуры. 3. ...
0 комментариев