Модель переходных
процессов в
манипуляторе
МРЛ-901П
Анализ переходных
процессов в
манипуляторе
МРЛ-901П
Определение
жесткости
звеньев манипулятора
МРЛ-901П
Методика
проведения
эксперимента
по определению
механических
характеристик
манипулятора
МРЛ-901П
Время перемещения
рабочего органа
манипулятора
при малых расстояниях
между рабочими
точками
Программа
для вычисления
параметров
переходного
процесса портального
манипулятора
Особенности
управления
созданием НТП
в условиях
рынка
Формы финансирования
НИР и ОКР в условиях
рынка
Правовая
защита производителей
НТП
Расчет текущих
затрат на создание
программного
изделия (себестоимости)
Расчет эксплуатационных
затрат
Расчет условно-годового
экономического
эффекта и срока
окупаемости
Навигация
Время перемещения рабочего органа манипулятора при малых расстояниях между рабочими точками
Построение и исследование динамической модели портального манипулятора
80670
знаков
142
таблицы
306
изображений
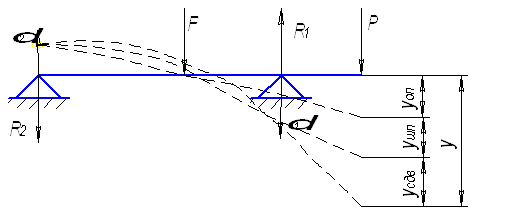
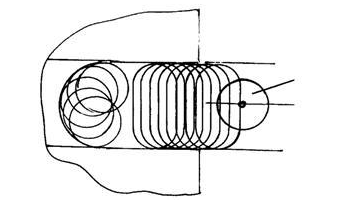
3.2 Время перемещения рабочего органа манипулятора при малых расстояниях между рабочими точками
Ч
асто
возникают
случаи, когда
расстояние
между двумя
рабочими точками
мало и рабочий
орган манипулятора
не успевает
набрать максимально
возможную
скорость. При
этом траектория
движения состоит
только из двух
участков – разгона и торможения
(см. рис. 3.3.).
Скорость рабочего
органа на участке
разгона достигает
некоторого
значения ![]() ,
длина этого
участка составит:
,
длина этого
участка составит:
|
| (3.11) |
 ,
,
где ![]() – максимальная
скорость которую
успевает набрать
рабочий орган
манипулятора;
– максимальная
скорость которую
успевает набрать
рабочий орган
манипулятора;
![]() – максимальное
ускорение
рабочего органа
манипулятора.
– максимальное
ускорение
рабочего органа
манипулятора.
На втором участке
траектории
необходимо
производить
торможение
рабочего органа
в связи с тем
что по достижению
конечной точки
его скорость
должна иметь
значение ![]() ,
при этом длина
второго участка
составит:
,
при этом длина
второго участка
составит:
|
| (3.12) |
 ,
,тогда складывая выражения (3.11) и (3.12) получим суммарное перемещение рабочего органа:
|
| (3.13) |
 .
.Зная расстояние между двумя рабочими точками, из (3.13) получим выражение для определения максимально достигнутой скорости:
|
| (3.14) |
 .
.Используя (3.14) определим время перемещения рабочего органа на первом:
|
| (3.15) |
 ,
,и втором участке:
|
| (3.16) |
 .
.Суммируя выражения (3.15), (3.16) и (2.33) получим выражение для определения времени перемещения с учетом переходного процесса при условии, что рабочий орган не успевает набрать максимальную скорость:
|
| (3.17) |
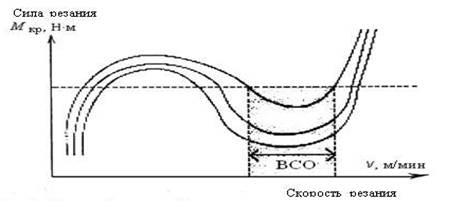
Анализируя
выражение
(3.17) относительно
скорости выхода
на конечную
точку ![]() ,
получаем график
времени перемещения
рабочего органа
манипулятора
с учетом переходного
процесса (см.
рис.3.4) для малых
перемещений
рабочего органа.
,
получаем график
времени перемещения
рабочего органа
манипулятора
с учетом переходного
процесса (см.
рис.3.4) для малых
перемещений
рабочего органа.
3.3 Получение оптимальной скорости в момент выхода на конечную точку
Анализ выражений
(3.10) и (3.17) показывает
(см. рис. 3.2, 3.4),
что время перемещения
рабочего органа
будет минимально
при таком значении
скорости ![]() ,
когда переходный
процесс в системе
отсутствуют,
то есть максимальная
амплитуда
колебаний не
превышает
допустимой
погрешности
позиционирования
,
когда переходный
процесс в системе
отсутствуют,
то есть максимальная
амплитуда
колебаний не
превышает
допустимой
погрешности
позиционирования
![]() .
Для определения
скорости
.
Для определения
скорости ![]() ,
достаточно
прировнять
к нулю выражение
(2.33):
,
достаточно
прировнять
к нулю выражение
(2.33):
|
| (3.18) |
 .
.
Решение (3.18) относительно
![]() имеет вид:
имеет вид:
|
| (3.19) |
 .
.Выражение (3.19) определяет такое значение скорости в момент выхода на конечную точку при которой амплитуда переходного процесса не превышает предельно допустимого значения, а следовательно время перемещения рабочего органа определяемое выражениями (3.10) и (3.17) минимально.
Анализ графиков зависимости времени перемещения с учетом переходного процесса от скорости выхода на конечную точку (см. рис. 3.2, 3.4.) показывает, что скорость выхода значительно влияет на время перемещения рабочего органа и отклонение скорости в большую сторону от расчетного значения ведет к значительным потерям времени за счет увеличения длительности переходного процесса.
Если проанализировать
выражения
(3.10) и (3.17) относительно
допустимой
погрешности
позиционирования
![]() ,
то можно сделать
вывод, что при
увеличении
допустимой
погрешности
позиционирования
(см. рис. 3.5, 3.6.) наблюдается
уменьшение
времени перемещения,
что можно
использовать
на операциях
с низким требованием
к точности,
хотя это уменьшение
весьма не
значительное.
,
то можно сделать
вывод, что при
увеличении
допустимой
погрешности
позиционирования
(см. рис. 3.5, 3.6.) наблюдается
уменьшение
времени перемещения,
что можно
использовать
на операциях
с низким требованием
к точности,
хотя это уменьшение
весьма не
значительное.
4.Программные средства для исследования динамической модели портального манипулятора
Похожие работы
... уменьшение времени перемещения, что можно использовать на операциях с низким требованием к точности, хотя это уменьшение весьма не значительное. 4. Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в ...
... рабочей позиции, фиксацию устройства или спутника на рабочей позиции оформляются в виде таблицы 3.1. В данной работе предлагается разработка автоматической линии для осуществления той части техпроцесса, которая связана со сверлильной и фрезерной обработкой поверхностей и отверстий. Таким образом, проектируемая линия должна обеспечивать указанную в задании производительность. Для этого произведем ...
... за две-три недели. Во время обследований необходимо избегать нарушений в работе других видов транспорта четкой координацией управления ими. Изучение пассажиропотоков позволяет выявить основные закономерности их колебания для использования результатов обследований в планировании и организации перевозок. Иначе говоря, характер изменения пассажиропотоков на маршрутах и в целом по конкретному ...

... системой ЧПУ и обеспечивает надежную работу также в условиях безлюдного производства. При этом предотвращаются повреждения шпинделя и тем самым ненужные дорогостоящие простои. высокоскоростной механический обработка инструмент шпиндель Рис. 2. Порядок точности – единицы μ обеспечивается датчиком (1) для измерения аксиального смещения вала шпинделя; 2 – датчик измерения температуры. 3. ...
0 комментариев