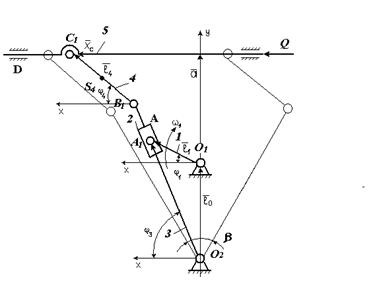
Графический метод исследования механизма
Графоаналитический метод исследования механизма
Построение годографа центра тяжести кулисы
Определение реакций в кинематических парах
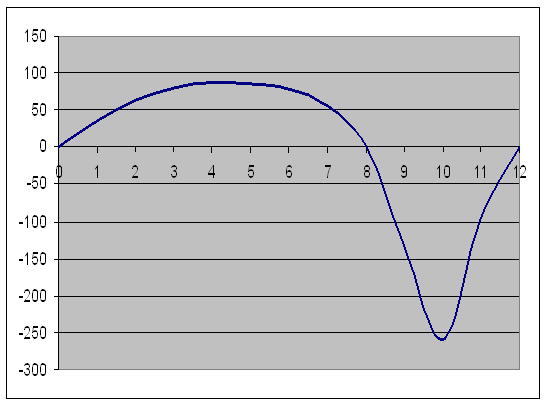
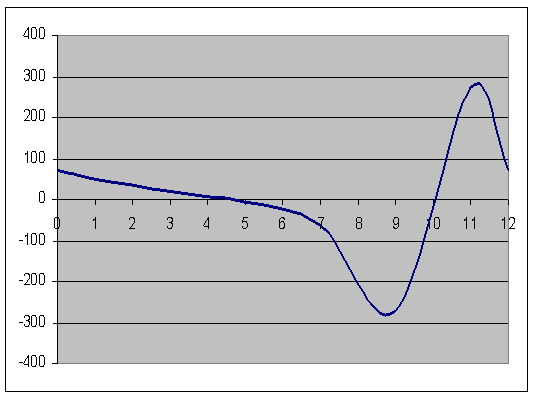
Построение графиков движения
Построение графика углов передачи движения
Построение картины станочного зацепления
Построение графика приведённого момента сил полезного сопротивления
Построение графика изменения кинетической энергии машинного агрегата
Навигация
Определение реакций в кинематических парах
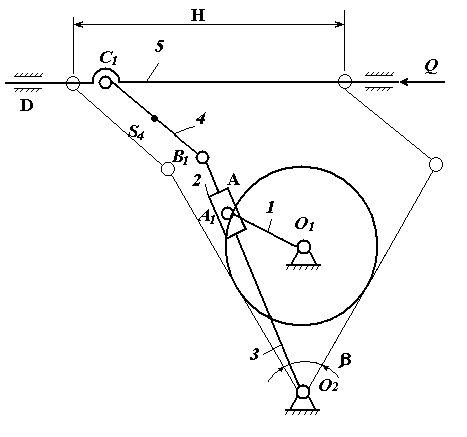
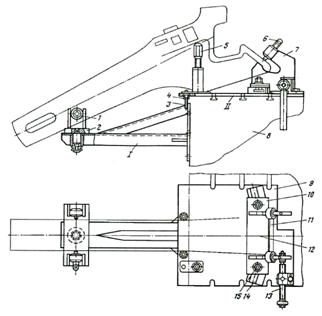
Расчёт поперечно-строгального станка
44063
знака
20
таблиц
4
изображения
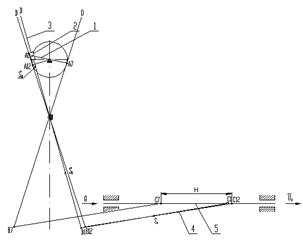
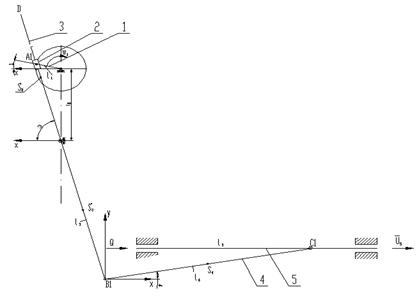
2.3. Определение реакций в кинематических парах.
2.3.1. Структурная группа
силовой расчёт начнём с наиболее удалённого звена т.к. все силы действующие на него известны. Действие отброшенных звеньев и реакций опор заменяем силами R0-5 и R3-4. Определим их величины и направления. Масштаб построения выберем mp=1 кгс/мм.
Рассмотрим равновесие звена 5:
ΣРi=0 G5+Pи5+Рпс+ R0-5 + R4-5=0
У реакции и сил, подчеркнутых одной чертой известно направление, двумя чертами величина и направление. Реакция R0-5 – направлена вертикально; R3-4- горизонтально. Построением силового многоугольника определим их величины (действием сил трения пренебрегаем).
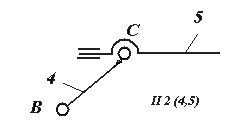
Далее рассмотрим равновесие звена 4:
ΣРi=0 R5-4 + Ри4 +G4 + R3-4= 0
R4-5=-R5-4 Построением находим величину и направление R3-4, которая приложена к шарниру. Для нахождения точки приложения R0-5 составим уравнения моментов всех сил, действующих на данную структурную группу относительно точки D.
ΣМd=0
РИ5*h1+R0-5h+Pпс(Pпс –0.01)=0
H=(37.4*18*0.0025+130(18*0.0025-0.01))/22=0.238 м.
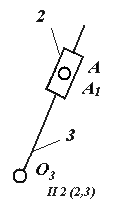
2.3.2. Структурная группа
В точке D приложим силу P4-3=-P3-4 . Звенья 1 и 2 соединены вращательной кинематической парой, значит, реакция P1-2 приложена в шарнире В. Звенья 3 и 2 образуют поступательную кинематическую пару, а так как силой трения мы пренебрегаем, то реакция между ними направлена перпендикулярна CD.
Рассмотрим равновесие кулисы (звена 3).
Составим уравнение моментов относительно точки С:
ΣМс=0 R4-3 h3 +PИ3 h3 +G3 h3 +Mи-P2-3h=0
R2-3=(170*150+10*0.6+16*9+0.896)/113=227 кг.
Для определения реакции Rс-3 составим уравнение суммы всех сил действующих на звено 3. Точка приложения силы – шарнир С
ΣFi=0 R4-3 +RИ3 +G3 +R2-3 +Rс-3=0
Для определения её величины и направления строим силовой многоугольник
LRс-3=26 мм. RС-3= LR0-3 mR=26*2=52 кг.
Для определения реакции R1-2 действующей со стороны ведущего звена на кулисный камень рассмотрим равновесие звена 2 (кулисного камня).
ΣFi=0 РИ2 +G3 +R3-2 +R1-2=0 R3-2 = -R2-3.
Для определения её величины и направления строим силовой многоугольник
LR1-2=119 мм. R1-2= LR0-3 mR=119*2=238 кг.
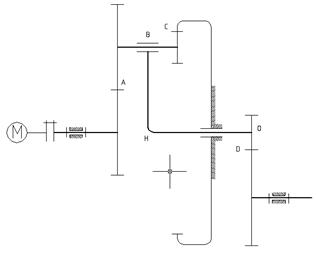
2.3.3. Силовой расчёт ведущего звена.
Ведущее звено представляет собой зубчатое колесо, выполненное с кривошипом, как одно целое. Ведущее звено будем считать статически и динамически уравновешенным, следовательно, Ри=0. Так как оно вращается с постоянной угловой скоростью то Е=0 þ Ми=0, число зубьев z=100. Модуль зубьев шестерни ведущего звена m=14.
На ведущее звено действуют силы: G1 – сила тяжести =10 кг. R2-1=-R1-2=238 кг. RА-1 – сила, действующая со стороны стойки на ведущее звено. Для того чтобы механизм совершал заданное движение необходимо к ведущему звену приложить уравновешивающую силу Рур. Точка её приложения – точка касания окружностей делительных окружностей зубчатых колёс ведущего звена и выходного колеса редуктора и составляет 20°(угол зацепления) к касательной, проведённой в этой точке.
Для нахождения Рур рассмотрим равновесие звена 1. Составим уравнение моментов относительно точки А.
ΣМа=0 R2-1 h1’ +Pур h1 =0
h1=(mzcos20)/2=(14*10*cos20)/2=285.7 мм.
h1’=Lh1*ml=13.5*10=135 мм.
Рур=R2-1*h1’/h1=238*135/285.7=112
Для определения Ra-1 составим следующее уравнение
ΣF=0 R2-1 + RA-1+ G1+Pур=0
Точкой её приложения служит шарнир А. Для определения велечины и направления построим силовой многоугольник.
Lа-1=
2.4. Определение уравновешивающей силы с помощью рычага Жуковского.
Повернём план скоростей на 90° по часовой стрелки для данного положения. Все внешние силы, включая силы инерции и веса звеньев, переносим параллельно себе в соответствующие точки плана и добавляем Ми3. Скорость точки F – приложения силы равна:
Vf=mz*w1/2=14*100*0.001*15.7/2=11 м/с.
Данный план скоростей и сил можно рассматривать как жесткий рычаг. Для определения Рyр составим уравнения моментов относительно точки Р, где плечом будет служить, длинна перпендикуляра, опущенного из полюса до линии действия силы
-(Рпс+Ри5+Ри4)*190-G4*19-Pи3*53-Ми3w3-G3*12-G2*69+Pур*11/0,025*cosa=0
Рур=((130+13,7+3,4)*190+2*19+10*53+0,896*15,7+16*12+2*69)/(440*cos20)=109 кг.
Найдём погрешность определения Рур различными способами.
Δ=(Рур ж-Рур пс)/Рур ж=(112-109)/112=3%
2.5. Рассчитаем необходимую мощность привода
М=РgV/m,
Где Р – уравновешивающая сила, V – скорость точки её приложения (11 м/с), m -- КПД привода
М=112*9.8*11/0.8=15 кВт.
3. Проектирование кулачкового механизма.
3.1. Исходные данные
Закон перемещения коромысла + - К
jу=113,6°=1,9827 рад.
jдс=14,2°=0,2478 рад.
jп=109°=1,9024 рад.
jбс=123,2°=2,15 рад.
Lкор=0,12 м.
βmax=25°=0,4363 рад.
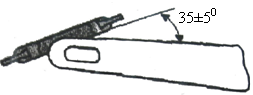
γmin=60°
Похожие работы
... 7,5 7,5 аА’ 3,8 2,5 2,6 6,4 8,5 10,3 7,5 ab 5,7 3,4 3,8 10,5 19,3 21,4 11 ac 5,8 2,1 1,7 10,5 16,1 20,8 11,7 1.5 Диаграммы движения выходного звена. Диаграмму перемещения строим , используя полученную из S-t плана механизма траекторию движения точки С. Диаграммы скорости V-t и ускорений A-t строим из полученных 12 планов скоростей ...
... на VBA Ускорения Величина ускорения, м/с^2 0 1 2 3 4 5 6 7 8 9 10 11 12 Расчётные 4.4 2.54 1,50 -0,351 -0.99 -1.19 -3,80 -3.91 -6.8 -6.31 1,28 6.99 4.4 Графические 4.36 2.41 1,60 -0.324 -0.96 -1.09 -3,90 -3.88 -6.7 -6.161 1,30 6.924 4.36 2. Силовой анализ механизма Исходные данные: масса кулисы ; масса шатуна ; масса ползуна . сила полезного ...
... участка. Принимаем процент узлов и деталей, поступающих в ремонт на условиях кооперации из эксплуатационного депо для тележечного участка =30% Принимаем программу для тележечного участка 1000 ед. 2. Совершенствование технологии контроля автосцепочного устройства 2.1 Виды и порядок осмотра автосцепочного устройства Автосцепное устройство подвижного состава должно постоянно находиться ...
... . Поэтому автолюбитель, желающий самостоятельно проводить на автомобиле более или менее сложные операции по техническому обслуживанию и ремонту, должен обзавестись еще некоторыми приспособлениями и инструментом. Слесарно-монтажный инструмент. Гаечные открытые ключи желательно иметь в полном ассортименте, причем лучше в двух экземплярах. Комбинированные и разводные ключи, специальные клещи для ...
0 комментариев