Графический метод исследования механизма
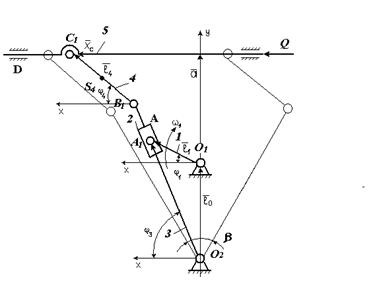
Графоаналитический метод исследования механизма
Построение годографа центра тяжести кулисы
Определение реакций в кинематических парах
Построение графиков движения
Построение графика углов передачи движения
Построение картины станочного зацепления
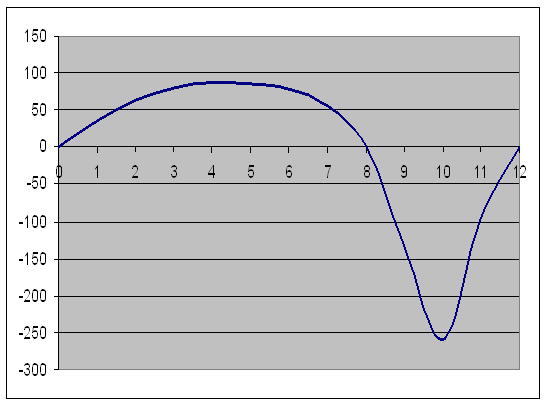
Построение графика приведённого момента сил полезного сопротивления
Построение графика изменения кинетической энергии машинного агрегата
Навигация
Построение графика углов передачи движения
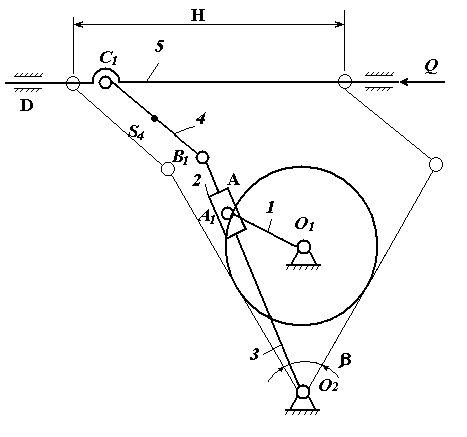
Расчёт поперечно-строгального станка
44063
знака
20
таблиц
4
изображения
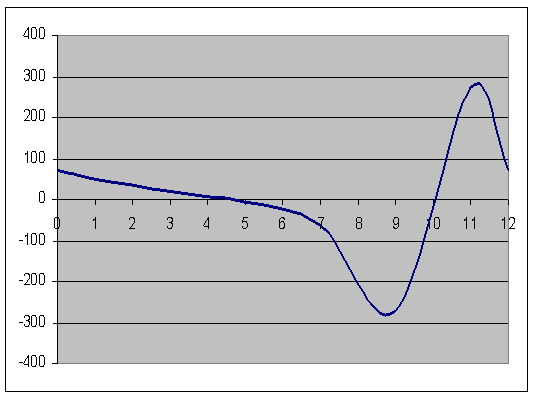
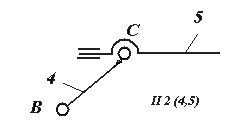
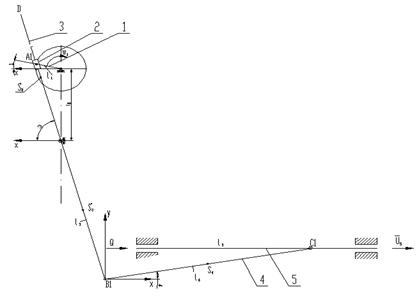
3.5. Построение графика углов передачи движения.
График изменения угла передачи движения γ по углу поворота кулачка строим по данным полученным графическим способом. Для этого точки Во,…,В25, полученные на совмещенном графике соединим с центром вращения кулачка О. Тогда острые углы, образованные этими прямыми с соответственными лучами, дают искомые углы γ.
Табл 7.
Углы передачи, измеренные графическим способом.
| № пол. | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| γ° | 75 | 70 | 65 | 63 | 62 | 62 | 64 | 72 | 80 | 87 | 92 | 97 | 79 |
| № пол. | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| γ° | 79 | 75 | 72 | 70 | 68 | 65 | 62 | 68 | 74 | 81 | 89 | 97 | 100 |
Выберем следующие масштабы для построения графка mj=0.18271 рад/мм. mγ=1°/мм.
Как видно из таблицы минимальный угол передачи больше минимально допустимого, следователь заклинивания в механизме не произойдёт как на прямом ходе, так и при реверсе.
4. Проектирование зубчатой передачи.
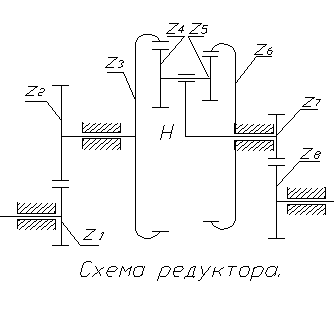
4.1. Исходные данные для проектирования зубчатой передачи:
Модуль m=14 мм.
Zш=13
Zк=30
aинструмента=20°
С=0,25m=3,5 мм.
ha=1
число зубьев колёс редуктора
z3=106
z4=48
z5=18
z6=76
z7=25
z8=100
n1=1400 об/мин
n8=150 об/мин
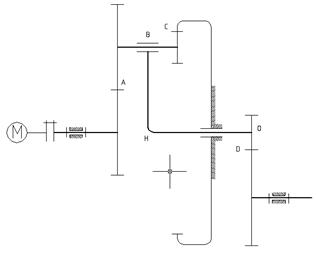
4.2. Расчёт редуктора.
Напишем уравнение передаточного отношения редуктора:
U1-8 = I1-2*I3-H*I7-8 = n1/n8 =1400/150 = 9.33
I3-6=(w6-wH)/(w 3-wH)=Z4Z6/(Z3Z5)
I3-H=n3/nh=1-i36.
I3-6=I34*I56=(-1)Z4/Z3(-1)Z6/Z5=(Z4Z6)/(Z3Z5)
I3-H=1-(48*76)/106*18=1-304/159= -0.912
I7-8=(-1)Z8/Z7=-N7/N8= -100/25= -4
N7=NH= -I7-8*N8=4*150=600 об/мин.
N=IN= -0.912*600= -547.17 об/мин.
N3=N2,
I1-2= (-1)Z2/Z1= -N1/N2= -2.5586.
Z2/Z1= 2.5586
Наиболее близко этому значению соответствует Z2=74 и Z1=29.
Рассчитаем число оборотов сателлита по формуле Виллиса:
I5-6=(w5-wH)/(w6-wH)=Z6/Z5, т.к w6=0, то
1-w5/wH=Z6/Z5
N5=N4=(1- Z6/Z5)NH=(1-76/18)*600= -1933.3 об/мин.
4.3. Построение картины зубчатого зацепления.
Применяем неравносмещенное зацепление. Из справочных таблиц имеем:
Iш-к= Zк/Zш= 30/13=2,3
Δy=0.18 X1=0.8 X2=0.471
XΣ=X1+X2=1.271
Y= XΣ –ΔY=1.091
Определим угол зацепления aw:
Inv aw=2*(X1+X2)/(Zш+Zк)*tga +inva=
2*1.271*tg20°/43+0.014904=0.036421.
Отсюда a w =26°34’45’’
Рассчитаем размеры зубчатых колёс по следующим формулам:
Шаг зацепления: Рa=р*m=43,9мм.
Радиусы делительных окружностей:
R1=mZш/2=91 мм; R2=mZk/2=210 мм.
Радиусы основных окружностей
Rb1=R1cosa w =81.38; Rb2=R2cosa w =187.8
Толщина зуба по делительной окружности:
S1=Pa/2+2*X1*m*tga=30.15
S2= Pa/2+2*X2*m*tga=26.73
Радиусы окружностей впадин:
Rf1=R1-m(ha+c-X1)=84.7
Rf2=R-m(ha+c-X2)=199.1
Межосевое расстояние
aw=m((Zш+Zk)/2+Y)=316.274
Радиусы начальных окружностей
Rw1=R1(1+2Y/(Zш+Zк))=95,6177
Rw1=R2(1+2Y/(Zш+Zк))=220,6563
Глубина захода зубьев:
Hd=(2ha-Δy)m=25.48
Высота зуба: h=hd+cm=28.98
Радиусы окружностей вершин:
Ra1=Rf1+h=113.68
Ra2=Rf2+h=228.074
Для построения выбираем масштаб ml=0,001 м/мм.
Построение картины зацепления начинаем с дуг начальных окружностей, касающихся в точки Р – полюсе зацепления. Через точку Р проводим прямую NN, образующую угол aw с общей касательной ТТ к начальным окружностям в точке Р. затем из центров О1 и О2 зубчатых колёс опускаем на прямую NN перпендикуляры О1N1 и O2N2, являющиеся радиусами основных окружностей rb1 и rb2, и строим основные окружности. Строим эвольвенты, которые описывает точка Р прямой NN при перекатывания её по основным окружностям, как для первого, так и для второго колеса. Проводим окружности впадин и вершин колёс. Проводим делительную окружность первого колеса. От точки С пересечения этой окружности с соответствующей эвольвентой откладываем по делительной окружности вправо и влево дуги СК и СЕ, равные шагу зацепления Рa в масштабе. Затем от точек Е, С и К откладываем влево дуги ЕF, CD и KL, равные толщине зуба S1. На втором колесе построения аналогичны.
Переходим к определению активной линии зацепления. Теоретической линией зацепления является отрезок N1N2 прямой NN. Активной линией зацепления является отрезок В1В2 прямой NN, заключенный между точками её пересечения с окружностями вершин колёс.
Определяем дугу зацепления. Для этого через крайние точки В1’ и B2’ рабочего участка профиля зуба первого колеса проводим нормали к этому профилю, то есть касательные к основной окружности первого колеса. Дуга а1в1 начальной окружности, заключенная между точками а1 и b1 пересечения этих нормали с начальной окружностью, является дугой зацепления первого колеса. Дугу зацепления а2b2 для второго колеса находим аналогично. Подсчитаем длину дуг зацепления:
A1B1=В1В2/(сosaw)=48/(cos26°34’45’’)=54.3 мм.
Подсчитаем коэффициент перекрытия по формуле:
Ea=В1В2/(p*m*сosaw)=48/(14*p*cos26°34’45’’)=1.22
При этом отрезок В1В2 берём из чертежа.
Построим диаграммы для значений коэффициентов удельных скольжений V1 и V2. Для этого проводим ось ОХ, параллельную линии зацепления N1N2. Перпендикуляра N1O1 и N2O2 отсекают на ОХ отрезок g, равный теоретической линии зацепления N1N2. На оси ОХ откладываем значения Х, а на прямых, паралельных N1O1, принятой за ось ординат, для соответствующих значений Х откладываем значения V1 и V2. Для выделения частей диаграмм, соответствующих значения V1 и V2 рабочих участков профилей зубьев, восстанавливаем из точек В1 и В2 линии зацепления перпендикуляры. Для большей наглядности строим круговые диаграммы V1 и V2 непосредственно на профилях зубьев соответствующих колёс.
Значения коэффициентов V1 и V2 подсчитываем по формулам:
V1=1-((g-x)Zш/(ZкХ))
V2=1-1/((g-x)Zш/(ZкХ))
Значения g и X берём с чертежа в масштабе. Подсчитав значения V1 и V2, результаты занесём в таблицу 6.
Табл 6.
Значения коэффициентов V1 и V2.
| Х | 0 | Х1=42,75 | Х2=66,5 | Х3=91,75 | Х4=117 | д.=219 |
| V1 | -∞ | -07087 | 0 | 0.399 | 0.622 | 1 |
| V2 | 1 | 0.44 | 0 | -0.664 | -1.647 | -∞ |
Для построения диаграмм назначим масштаб: mv=0,1 1/мм.
Похожие работы
... 7,5 7,5 аА’ 3,8 2,5 2,6 6,4 8,5 10,3 7,5 ab 5,7 3,4 3,8 10,5 19,3 21,4 11 ac 5,8 2,1 1,7 10,5 16,1 20,8 11,7 1.5 Диаграммы движения выходного звена. Диаграмму перемещения строим , используя полученную из S-t плана механизма траекторию движения точки С. Диаграммы скорости V-t и ускорений A-t строим из полученных 12 планов скоростей ...
... на VBA Ускорения Величина ускорения, м/с^2 0 1 2 3 4 5 6 7 8 9 10 11 12 Расчётные 4.4 2.54 1,50 -0,351 -0.99 -1.19 -3,80 -3.91 -6.8 -6.31 1,28 6.99 4.4 Графические 4.36 2.41 1,60 -0.324 -0.96 -1.09 -3,90 -3.88 -6.7 -6.161 1,30 6.924 4.36 2. Силовой анализ механизма Исходные данные: масса кулисы ; масса шатуна ; масса ползуна . сила полезного ...
... участка. Принимаем процент узлов и деталей, поступающих в ремонт на условиях кооперации из эксплуатационного депо для тележечного участка =30% Принимаем программу для тележечного участка 1000 ед. 2. Совершенствование технологии контроля автосцепочного устройства 2.1 Виды и порядок осмотра автосцепочного устройства Автосцепное устройство подвижного состава должно постоянно находиться ...
... . Поэтому автолюбитель, желающий самостоятельно проводить на автомобиле более или менее сложные операции по техническому обслуживанию и ремонту, должен обзавестись еще некоторыми приспособлениями и инструментом. Слесарно-монтажный инструмент. Гаечные открытые ключи желательно иметь в полном ассортименте, причем лучше в двух экземплярах. Комбинированные и разводные ключи, специальные клещи для ...
0 комментариев