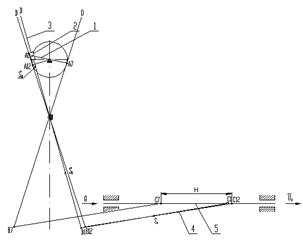
Графический метод исследования механизма
Графоаналитический метод исследования механизма
Построение годографа центра тяжести кулисы
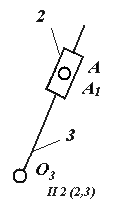
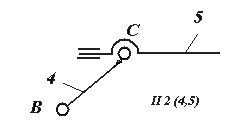
Определение реакций в кинематических парах
Построение графиков движения
Построение графика углов передачи движения
Построение картины станочного зацепления
Построение графика приведённого момента сил полезного сопротивления
Построение графика изменения кинетической энергии машинного агрегата
Навигация
Построение графика изменения кинетической энергии машинного агрегата
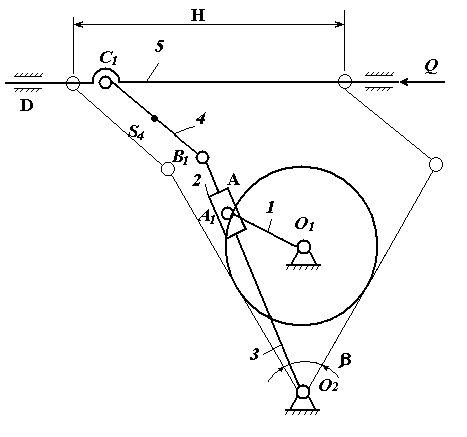
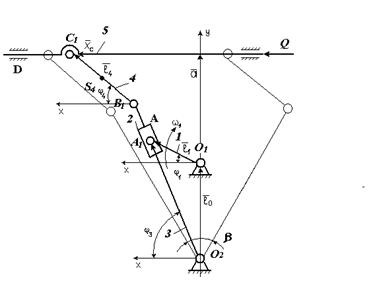
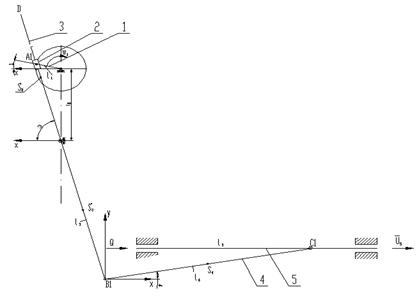
Расчёт поперечно-строгального станка
44063
знака
20
таблиц
4
изображения
5.4. Построение графика изменения кинетической энергии машинного агрегата.
Изменение кинетической энергии машины равно разности работ сил движущих и сил сопротивления:
ΔТ=Аδ-Апс.
Обозначим ΔТ как Та.
Для построения графика зависимости Та=f(j) нужно снять в каждом положении разницу между значения Аδ и Ас.
Для всех графиков зависимости кинетической энергии от угла поворота ведущего звена назначают масштаб mт=2дж/мм. поэтому отрезок, характеризующий разницу Аδ и Ас делим пополам, прежде чем перенести его на график зависимости Та=f(j). Для этого графика назначаем масштабы mj=0,026 и mт=2
5.5. Построение графика изменения кинетической энергии звеньев механизма.
Величину кинетической энергии звеньев механизма в каждом из 12 положений определяем по формуле:
Тзв=w2ср*Jп/2, где
Тзв – кинетическая энергия звеньев механизма
wср – средняя угловая скорость ведущего звена
Jп – проведенный момент инерции звеньев
Для данного механизма wср=15,7 рад/с.
Приведённый момент инерции звеньев для каждого положения механизма вычисляем по формуле:
Jр=Jp.ред+Jп.к.с.+m5*L2п 2+m3*Lп2* 2+Js3 2, где
Jпр.ред – приведённый момент инерции редуктора
Jпк.с. – приведённый момент инерции коробки скоростей
m5, m3 – масса 3 5 звена
Js3 – момент инерции третьего звена относительно центра масс
Lп – расстояние от точки приведения до центра вращения.
Lп=Lав.=0,14 м.
Vп – скорость точки приведения.
Vп=2,2 м/с
wп – угловая скорость звена приведения
wп=15,7 рад/с.
Vs5 и Vs3 – скорости центров масс 5 и 3 звеньев соответственно
w3 – угловая скорость вращения 3 звена.
Приведём пример расчета Jп для 3-его положения:
Jр=2,8449+0,3924+22*(0,14*2.67)2/2,22+16*(0,14*1.095)2/2,22+0,3924*3.7752/15,72=3.4 кг*м2.
Аналогичным образом рассчитываем приведённый момент инерции для оставшихся положений.
Построение график изменения кинетической энергии звеньев механизма в зависимости от угла поворота Тзв=f(j). Для этого подсчитаем Тзв по формуле:
Тзв=w2ср*Jп/2, для третьего положения имеем
Тзв=15,72*3,4/2=419,18 кг*м2.
Полученные таким образом данные занесём в таблицу
Табл. 10
Изменение приведённого момента инерции звеньев и кинетической энергии для 12-ти положений.
| № пол. | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| Vs3 | 0 | 0.623 | 0.95 | 1.095 | 1.11 | 1.003 | 0.732 | 0.204 | 0.722 | 1.875 | 2.082 | 1.035 | 0 |
| Vs5 | 0 | 1.462 | 2.28 | 2.671 | 2.719 | 2.422 | 1.726 | 0.472 | 1.687 | 4.485 | 5.076 | 2.438 | 0 |
| w3 | 0 | 2.149 | 3.276 | 3.775 | 3.829 | 3.46 | 2.524 | 0.703 | 2.49 | 6.465 | 7.179 | 3.569 | 0 |
| Jp | 3,23 | 3,28 | 3,35 | 3,40 | 3,40 | 3,37 | 3,30 | 3,24 | 3,30 | 3,71 | 3,82 | 3,37 | 3,23 |
| Тзв | 398,9 | 405,1 | 414,0 | 419,1 | 419,8 | 415,8 | 407,7 | 399,6 | 407,4 | 457,3 | 471,9 | 416,5 | 398,9 |
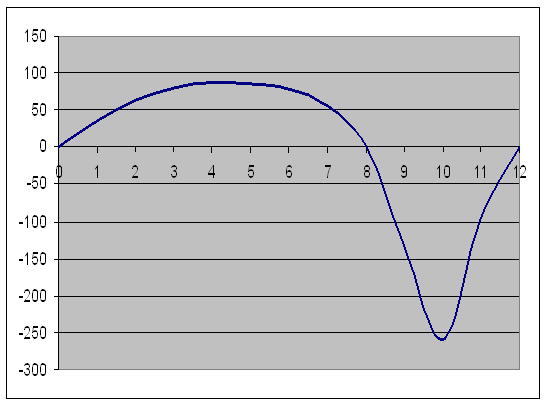
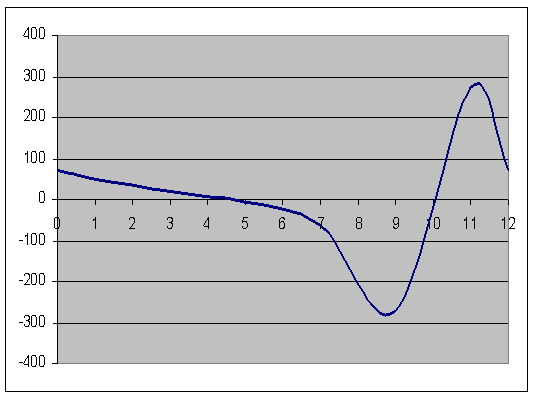
По данным таблицы строим график зависимости Тзв=f(j).
5.6. Определение момента инерции маховика
Момент инерции маховика определяем при помощи графика изменения кинетической энергии маховика, т.е. графика зависимости Тк=f(j), где Тк – изменение кинетической энергии маховика.
Для построения графика зависимости Тк=f(j) мы для каждого положения машины из ординат графика зависимости Та=f(j) вычитаем ординату графика зависимости Тзв=f(j), построенных в масштабе mт=2 дж/мм.
Это основано на том, что Тк=Та-Тзв.
Построенный таким образом график зависимости Тк=f(j) будет иметь масштабы:
mj=0,026 рад/мм. mт= 2 дж/мм.
далее проводим две горизонтальные прямые соприкасающиеся с кривой, графика зависимости Тк=f(j) в точках наибольшего максимума В’ и наименьшего минимума – D’, и отсекаем этими прямыми на оси ординат отрезок ВD.
Проведя затем через точки В’ и D’ вертикальные прямые до пересечения с осью абсцисс, находим точки b и d, соответствующие углам jb и jd. Зная эти углы и используя данные графика зависимости Тзв=f(j), находим приведённые моменты инерции Jпb и Jпd, соответствующие wmax и wmin:
Jпb= 2*mт(ас)/w 2ср=2*2*20,3/15,72=0,32 кгм2.
Jпd= 2*mт(ef)/w 2ср=2*2*181/15,72=2.9 кгм2.
Определяем момент инерции маховика по формуле, которая в нашем случае имеет вид:
Jм= mт(BD)/(δw 2ср)-(Jпb+Jпd)/2=165.9*2*15/15,72-(2.9+0.32)/2=17.1 кгм2.
6.7. Конструирование маховика
Выразим момент инерции и массу маховика в зависимости от наружного диаметра маховика:
Jм=Kj*p*D5.
mM= Km*p*D3, где
конкретные значения Kj и Kм вычисленные для каждого из видов конструкции маховиков. Т.е. зная величину Jм, конструкцию и материал маховика вычислим его массу mM и наружный диаметр D.
Для маховика выберем материал серый чугун марки СЧ12, имеющий плотность р=7540 кг/м3, т.к. величина на окружной скорости <25 м/с.
Конструкция маховика – со спицами. Число спиц зависит от величины внешнего диаметра D. Приняв D ~ 700 мм. назначим число спиц 4.
Для маховиков с 4 спицами Kj=0.0076, Km=0.0452.
Вычисляем величину D= = =0.785м.
Вычисляем массу маховика mM= Km*p*D3=0,0452*7540*0,7853=165 кг.
Рабочие размеры рассчитываем по формулам:
Посадочный диаметр маховика на вал:
d1=0.2*D=0.2*785=160 мм.
Диаметр ступицы: d2=0.3D=235 мм.
Внутренний диаметр маховика: d3=0,8D=628 мм.
Ширена маховика: b=0.125D=98 мм.
Ширена ступецы: bст=1.05b=103 мм,
Сечение спиц эллиптическое с соотношением высот осей bcп/aсп=0,4. Спицы выполняются коническими. Размеры bсп b асп уменьшаются на 20%.
Толщина спицы у ступицы b1=1,1b=43 мм.
Толщина спицы у обода b2=0.352b=35 мм.
Ширена спицы у ступецы а1=1,1b=107.8 мм.
Ширена спицы у обода а2=0,88b=86.3 мм.
По данным размерам выполняем чертёж маховика в масштабе ¼.
5.8. Расчёт привода.
Из механики известно что N=Mc*w, где
Мс – момент сил сопротивления, определяется из чертежа Мс=Lод*mм=46,7*2=93,4 нм.
w -- угловая скорость ведущего звена w=15,7 рад/с.
Мс=93,4*15,7=1466,4 вт
Большое расхождение с мощностью подсчитанной в п.2.5. получилось из-за того, что там была рассчитана мгновенная мощность, а здесь средняя за один оборот.
Список литературы:
1. А. С. Кореняко «Курсовое проектирование по теории машин и механизмов» -- Вища школа, Киев 1970г.
2. И. И. Артобалевский «Теория машин и механизмов» – Наука, Москва 1980г.
3. Н. М. Постников «Теория машин и механизмов» (конспект лекций), ПГТУ Пермь 1994г.
Похожие работы
... 7,5 7,5 аА’ 3,8 2,5 2,6 6,4 8,5 10,3 7,5 ab 5,7 3,4 3,8 10,5 19,3 21,4 11 ac 5,8 2,1 1,7 10,5 16,1 20,8 11,7 1.5 Диаграммы движения выходного звена. Диаграмму перемещения строим , используя полученную из S-t плана механизма траекторию движения точки С. Диаграммы скорости V-t и ускорений A-t строим из полученных 12 планов скоростей ...
... на VBA Ускорения Величина ускорения, м/с^2 0 1 2 3 4 5 6 7 8 9 10 11 12 Расчётные 4.4 2.54 1,50 -0,351 -0.99 -1.19 -3,80 -3.91 -6.8 -6.31 1,28 6.99 4.4 Графические 4.36 2.41 1,60 -0.324 -0.96 -1.09 -3,90 -3.88 -6.7 -6.161 1,30 6.924 4.36 2. Силовой анализ механизма Исходные данные: масса кулисы ; масса шатуна ; масса ползуна . сила полезного ...
... участка. Принимаем процент узлов и деталей, поступающих в ремонт на условиях кооперации из эксплуатационного депо для тележечного участка =30% Принимаем программу для тележечного участка 1000 ед. 2. Совершенствование технологии контроля автосцепочного устройства 2.1 Виды и порядок осмотра автосцепочного устройства Автосцепное устройство подвижного состава должно постоянно находиться ...
... . Поэтому автолюбитель, желающий самостоятельно проводить на автомобиле более или менее сложные операции по техническому обслуживанию и ремонту, должен обзавестись еще некоторыми приспособлениями и инструментом. Слесарно-монтажный инструмент. Гаечные открытые ключи желательно иметь в полном ассортименте, причем лучше в двух экземплярах. Комбинированные и разводные ключи, специальные клещи для ...
0 комментариев