Навигация
2. Специальная часть.
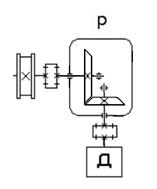
2.1 Схема управления должна отвечать всем требованиям, заданным в п.1.1. Наиболее распространенной схемой является схема, построенная на основе командоконтроллера. Она имеет высокую ремонтопригодность, дешевую элементную базу и большую надежность.
Контроль нулевого положения командоконтроллера SA осуществляет реле KS, контакт которого подает питание на схему управления.
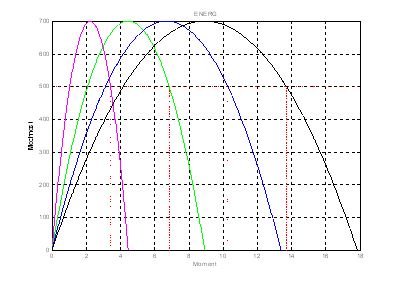
В первом положении "Вперед" включаются контакторы KM1 и KM2, которые подключают статор двигателя к сети. Блок-контакт КM2 включает реле K, которое включает контактор тормозного электромагнита KM3. При этом двигатель растормаживается и идет в ход при полностью включенном в цепь ротора реостате (кривая 1 на рисунке 1).
В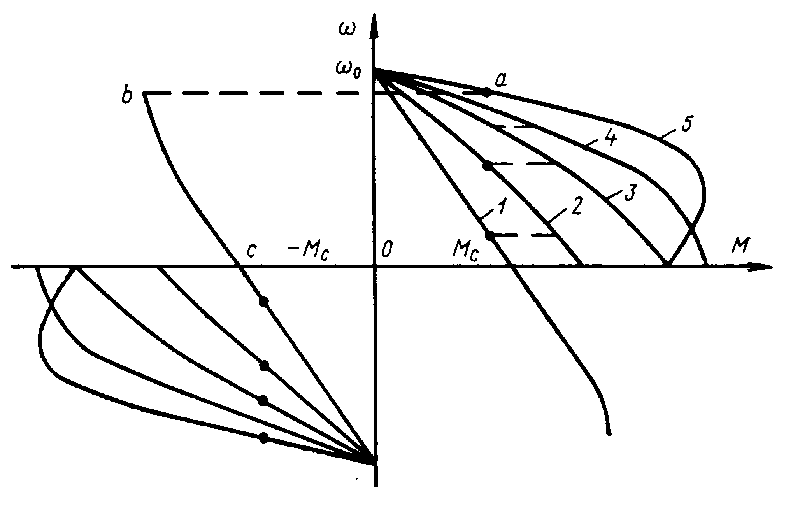
о
втором положении
контроллера
включается
контактор KM4
(см. графическую
работу, лист
1), который шунтирует
предварительную
ступень пускового
реостата (двигатель
работает на
характеристике
2, рисунок 1).
Рисунок 1 - Механические характеристики кранового электродвигателя.
Машинист может установить ручку командоконтроллера сразу в крайнее правое положение. Разгон будет осуществляться автоматически, в функции времени, с помощью реле KAT1 - KAT3 (см. графическую работу, лист 1). Блок-контакт KM4 разомкнет цепь катушки первого ускоряющего реле KAT1, и последнее с выдержкой времени включит первый ускоряющий контактор KM5. Аналогично с помощью реле KAT2 и KATЗ включаются ускоряющие контакторы соответственно KM6 и KM7.
Для питания катушек реле времени служит выпрямитель; контактор KM6, включившись, своим блок-контактом, отключит от сети выпрямитель, а вместе с ним и катушку реле KATЗ. Двигатель будет работать на характеристиках 3, 4, 5 (см. рисунок 1).
В цепи ротора всегда остается невыключенной часть реостата. Этим смягчается механическая характеристика (кривая 5 на рисунке 1), благодаря чему массы двигателя и крана в большей степени помогают двигателю преодолевать пиковые перегрузки.
Как отмечалось, электропривод может работать в двигательном режиме и в режиме торможения противовключением. Если при движении крана «Вперед» рукоятку командоконтроллера SA (см. графическую работу, лист 1) перевести в любое положение «Назад», контактор KM1 отключит двигатель от сети, а затем включится контактор KM8 и реле KCC. Контакторы ускорения KM5—KM7, KM4 отключаются, и в цепь ротора будет введен весь реостат. В момент перехода командоконтроллера SA через нулевое положение кратковременно отключится реле K, контакт которого шунтирует добавочный резистор R1 в цепи реле KCC. Этим осуществляется форсировка включения реле KCC. Если рукоятка SA была переведена в первое положение «Назад», то после окончания процесса торможения кран останавливается. Если рукоятка была установлена во 2, 3 или 4-е положения, то после снижения скорости до 10% от номинальной отключается реле KCC, которое своим контактом подключает цепь питания ускоряющих контакторов, и начинается автоматический разгон двигателя в направлении «Назад».
Торможение осуществляется по линии abc (см. рис. 1): по линии аb — переход двигателя в режим торможения противо-включением и по линии ba — его замедление и остановка.
Контакты конечных выключателей SQ1, SQ2, размыкающиеся в предельно крайних положениях, и контакт максимального реле KA включены в цепь реле KS (см. графическую работу, лист 1). Максимальное реле состоит из трех катушек с подвижным якорем, воздействующих на один общий контакт.
Как отмечалось, аппаратура управления и тормозные электрод-магниты постоянного тока отличаются сравнительно высокой износостойкостью, долговечностью, надежностью, большой допустимой частотой включения и т. п. Поэтому для кранов, работающих в режимах Т и ВТ, используются магнитные контроллеры типов К, КС ДК.
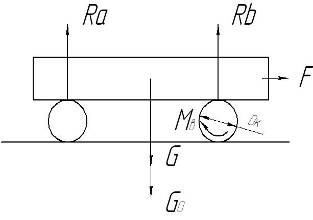
2.2 Построение нагрузочной диаграммы механизма.
2.2.1 Определяем передаточное число редуктора привода тележки:
(1)
где R - радиус колеса тележки, м;
n - частота вращения вала приводного двигателя, об/мин;
V - заданная скорость тележки, м/мин;
2.2.2 Определяем статические моменты на входном валу редуктора при холостом и рабочем пробегах тележки:
(2)
где k1 = 1,25 - коэффициент, учитывающий трение реборды колеса тележки о рельс;
G - сила тяжести перемещаемого груза;
= 0,015ч 0,15 - коэффициент трения в опорах ходовых колес;
r - радиус цапфы;
f - коэффициент трения качения ходовых колес по рельсам;
i - передаточное число редуктора;
- КПД редуктора;


2![]()
.2.3
Строим нагрузочную
диаграмму
механизма:
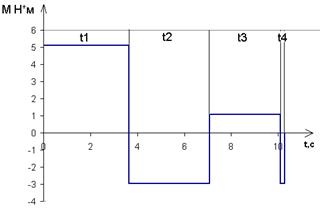
Рисунок 2 - Нагрузочная диаграмма механизма.
2.3 Расчет мощности двигателя и его выбор.
2.3.1 Определяем продолжительность включения ПВ:
(3)
где t1 ,t2 ,t3 ,tn, - длительности включений механизма передвижения;
t0 - суммарное время простоя механизма за рабочий цикл;
2.3.2 Определяем эквивалентный момент:
(4)
Где Mi - величина момента в некотором рабочем режиме;
Tц - время рабочего цикла;
ti - длительности действия соответствующих моментов на вал приводного двигателя;

2.3.3 Находим расчетную мощность двигателя:
![]() (5)
(5)
где kз =1,3 - коэффициент запаса, учитывающий неучтенные моменты в редукторе;
Мс.э - эквивалентный статический момент;
расч.- угловая скорость выбираемого приводного двигателя;
![]()
Пересчитываем расчетную мощность двигателя при ПВ =20% на ПВ= 40%, для того, чтобы выбрать электрическую машину из справочника:
![]() (6)
(6)
![]()
2.3.4 Выбираем конкретный двигатель - МТF312-6, асинхронную машину с фазным ротором с осевым моментом инерции Jдв.=0,312 кгм2, номинальной частотой вращения 965 об/мин., номинальными токами статора и ротора соответственно 38 и 60 А и мощностью 15 кВт.
2.3.5 Для определения момента инерции на входном валу редуктора переходим от поступательного движения тележки к вращательному движению некого цилиндрического тела, посаженного на вал электродвигателя, создающего те - же статические и динамические нагрузки:
(7)
где V2 - квадрат скорости поступательно движущейся тележки;
m - масса тележки ;
J - осевой момент инерции;
2 - квадрат угловой частоты вращения вала двигателя;
Выделяем переменную j из вышеуказанного равенства:
(8)


Таким образом, мы получили приведенные осевые моменты инерции порожней и нагруженной тележки без учета моментов инерции соединительной муфты и тормозного шкива.
2.3.6 Зная приведенные моменты инерции мы можем определить полный осевой момент инерции системы "двигатель - механизм" как для полностью загруженного, так и для порожнего механизма передвижения:
![]()
(9)
где Jдв. - паспортный осевой момент инерции приводного двигателя;
Jх.х.(р.х) - приведенный осевой момент инерции на валу двигателя для холостого и загруженного состояний механизма передвижения без учета момента инерции двигателя, соединительной муфты и тормозного шкива;
Jм - момент инерции соединительной муфты (Jм=0,15Jдв.);
Jш - момент инерции тормозного шкива (Jш=0,2Jдв.);
![]()
![]()
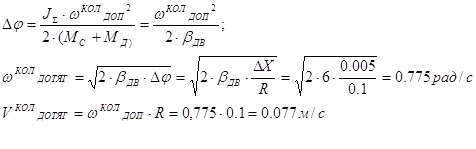
2.3.7 Определяем динамические моменты для построения уточненной нагрузочной диаграммы:
(10)
где J - (см. формулу 8);
- изменение угловой скорости;
t - время разгона механизма;
Mд.х. и Mд.р. - динамические моменты разгона и торможения для холостого и загруженного состояний тележки механизма передвижения.
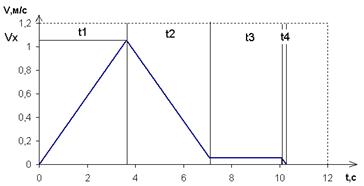
2.3.8 Строим уточненную нагрузочную диаграмму механизма с тахограммой:
Рисунок 3 - Нагрузочная диаграмма механизма с тахограммой.
2.3.9 Проверяем выбранный двигатель по нагреву:
![]()
(11)
Эквивалентный момент вычисляем по формуле 4:

Определяем рабочий момент двигателя:
(12)
![]()
В случае, если двигатель подходит для заданной интенсивности работы, момент эквивалентный на его валу должен быть меньше номинального, т.е. должно выполнятся неравенство 13:
![]()
(13)
![]()
Двигатель выбран правильно.
2.4 Выбор релейно-контактной аппаратуры.
2.4.1 Для управления асинхронным электродвигателем привода используем магнитный контроллер ТА-63 [6] , т.к. он обеспечивает все необходимые режимы работы для механизма перемещения и подходит по допустимой мощности двигателя.
2.4.2 Для ограничения передвижения кранового моста в схеме использованы конечные выключатели.
Контакты конечных выключателей, как правило, включаются в цепи управления - в цепи катушек контакторов и реле.
В качестве конечных выключателей выбираем получившие наибольшее распространение в крановых установках отечественного производства выключатели серии КУ-700А.
Похожие работы
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... до (1000-1500:1 и выше. Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую является электрический двигатель, который чаще всего управляется при помощи соответствующих ...

... (разгон, замедление) и период движения с установившейся скоростью. Мостовой кран установлен в литейном цеху металлургического производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев