Навигация
2. Специальная часть.
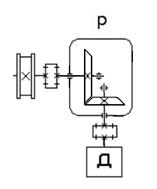
2.1 Схема управления должна отвечать всем требованиям, заданным в п.1.1. Наиболее распространенной схемой является схема, построенная на основе командоконтроллера. Она имеет высокую ремонтопригодность, дешевую элементную базу и большую надежность.
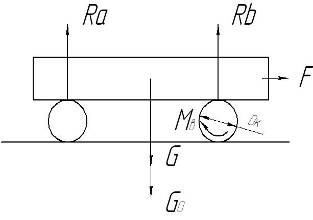
На первом листе графической работы приведена схема управления электроприводом механизма передвижения с магнитным контроллером типа К-63. Схема выполнена симметричной для обоих направлений движения. Число фиксированных положений в каждую сторону — четыре. Схема обеспечивает автоматический пуск, реверс, торможение и ступенчатое регулирование скорости путем изменения сопротивления резисторов в роторной цепи. Разгон в направлении «Вперед» и «Назад» производится в три ступени с помощью контакторов Кб, К7 и К8
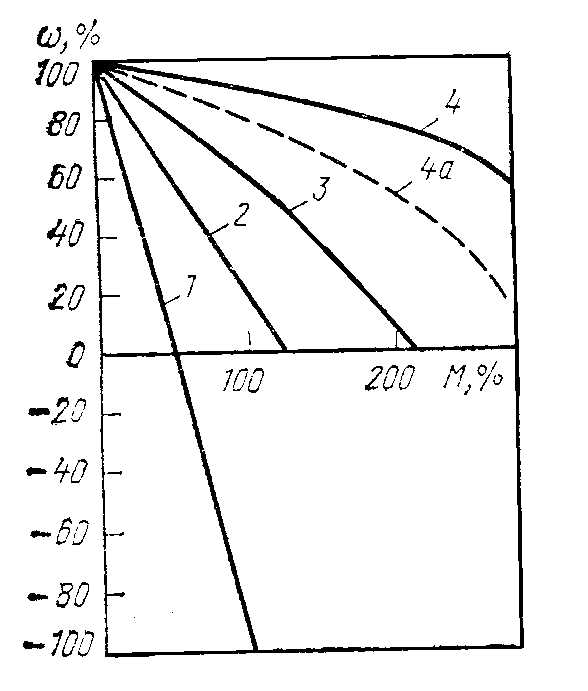
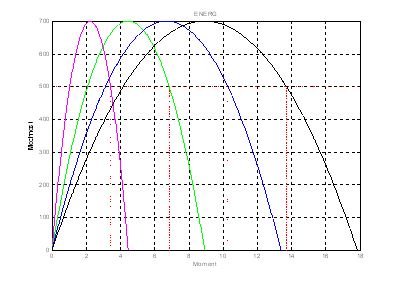
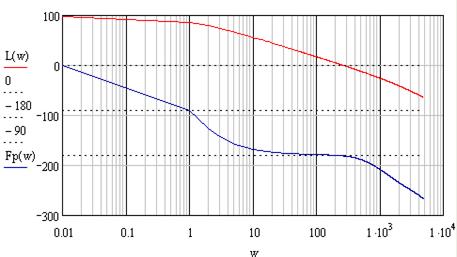
Рисунок 1 - Механические характеристики электропривода механизма передвижения с магнитным контроллером K-63:
1-4 - соответствуют положениям командоконтроллера на подъем;
4а - промежуточная характеристика;
На рис. 1 приведены механические характеристики указанной схемы. Для этих характеристик за 100 % момента принят номинальный момент электродвигателей серий МТР и МТН в режиме ПВ=40 %, за 100 % скорости—синхронная частота вращения электродвигателя. Эти характеристики рассчитаны, исходя из условий обеспечения необходимых параметров ускорения электропривода при пуске и торможении в режиме противовключения. Для обеспечения нормального пуска в схеме предусмотрены невыключаемые ступени резисторов в цепи ротора. При переводе рукоятки командоконтроллера из нулевого положения в первое осуществляется задержка на время срабатывания реле противовключения КV2. Дальнейший разгон происходит под контролем реле КТТ и К.Т2, причем реле К.Т1 обеспечивает переход на характеристики, соответствующие третьему и четвертому положениями командоконтроллера. Диапазон выдержек времени этих реле (при отпадании якоря), определяющих интенсивность ускорения, 0,4—2,5 с.
Схема допускает свободный выбег (при нулевом положении командоконтроллера) или торможение с помощью механического тормоза с электромагнитом УВ. Для остановки механизма по схеме со свободным выбегом переключают командоконтроллер на противоположное направление движения. При этом, независимо от положения его рукоятки, собирается схема, соответствующая первому положению, и происходит торможение в режиме противовключения. При скорости, близкой к нулю, реле противовключения КV2 отключает электродвигатель, воздействуя на цепь катушки контакторов направления КЗ или К4. После остановки механизма возможен разгон его в противоположном направлении. В процессе оперативного торможения механический тормоз не участвует. Для осуществления торможения противовключением на катушку реле КV2 подается разность выпрямленных напряжений U: постоянного Uу—от независимого источника, питающего цепь управления; переменного UUZ. от ротора U=Uу—UUZ..
Реле КV2 сработает, когда напряжение Uу превысит на определенную величину напряжение UUZ, т. е. при значениях скольжения от 1,0 до номинального при пуске и от 1,3 до 1,0—в режиме торможения противовключением, которое позволяет осуществить плавную остановку кранового механизма. Механическое торможение осуществляется только при аварийных ситуациях, когда срабатывает любая из защит—максимальная, конечная, нулевая или отключают установку нажатием на кнопку аварийного выключения SВ.
Для получения схемы без свободного выбега с применением механического торможения электромагнитом переменного тока следует произвести следующие переключения в схеме: тормозной электромагнит переменного тока присоединить непосредственно к выводам обмотки статора; отключить катушки контакторов управления тормозом К1 и К.2; зашунтировать контакты конечных выключателей SQ1 и SQ2 размыкающими контактами контакторов направления К.4 и К.З, отсоединив при этом замыкающие контакты этих контакторов и размыкающий контакт К2.
2.2 Построение нагрузочной диаграммы механизма.
2.2.1 Определяем передаточное число редуктора привода тележки:
(1)
где R - радиус колеса тележки, м;
n - частота вращения вала приводного двигателя, об/мин;
V - заданная скорость тележки, м/мин;
2.2.2 Определяем статические моменты на входном валу редуктора при холостом и рабочем пробегах тележки:
(2)
где k1 = 1,25 - коэффициент, учитывающий трение реборды колеса тележки о рельс;
G - сила тяжести перемещаемого груза;
= 0,015ч 0,15 - коэффициент трения в опорах ходовых колес;
r - радиус цапфы;
f - коэффициент трения качения ходовых колес по рельсам;
i - передаточное число редуктора;
- КПД редуктора;


2![]()
.2.3
Строим нагрузочную
диаграмму
механизма:
Рисунок 2 - Нагрузочная диаграмма механизма.
2.3 Расчет мощности двигателя и его выбор.
2.3.1 Определяем продолжительность включения ПВ:
(3)
где t1 ,t2 ,t3 ,tn, - длительности включений механизма передвижения;
t0 - суммарное время простоя механизма за рабочий цикл;
2.3.2 Определяем эквивалентный момент:
(4)
Где Mi - величина момента в некотором рабочем режиме;
Tц - время рабочего цикла;
ti - длительности действия соответствующих моментов на вал приводного двигателя;

2.3.3 Находим расчетную мощность двигателя:
![]() (5)
(5)
где kз =1,3 - коэффициент запаса, учитывающий неучтенные моменты в редукторе;
Мс.э - эквивалентный статический момент;
расч.- угловая скорость выбираемого приводного двигателя;
![]()
Пересчитываем расчетную мощность двигателя при ПВ =20% на ПВ= 40%, для того, чтобы выбрать электрическую машину из справочника:
![]() (6)
(6)
![]()
2.3.4 Выбираем электрическую машину - МТF411-8, асинхронный двигатель с фазным ротором с осевым моментом инерции Jдв.=0,537 кгм2, номинальной частотой вращения 710 об/мин., номинальными токами статора и ротора соответственно 42 и 48 А и мощностью 15 кВт.
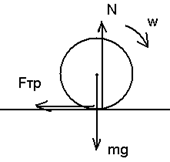
2.3.5 Для определения момента инерции на входном валу редуктора переходим от поступательного движения тележки к вращательному движению некого цилиндрического тела, посаженного на вал электродвигателя, создающего те - же статические и динамические нагрузки:
(7)
где V2 - квадрат скорости поступательно движущейся тележки;
m - масса тележки ;
J - осевой момент инерции;
2 - квадрат угловой частоты вращения вала двигателя;
Выделяем момент инерции j из вышеуказанного равенства:
(8)


Мы получили приведенные осевые моменты инерции порожней и нагруженной тележки без учета моментов инерции соединительной муфты и тормозного шкива.
2.3.6 Исходя из знания приведенных моментов инерции мы можем определить полный осевой момент инерции системы "двигатель - механизм" как для полностью загруженного, так и для порожнего механизма передвижения:
![]()
(9)
где Jдв. - паспортный осевой момент инерции приводного двигателя;
Jх.х.(р.х) - приведенный осевой момент инерции на валу двигателя для холостого и загруженного состояний механизма передвижения без учета момента инерции двигателя, соединительной муфты и тормозного шкива;
Jм - момент инерции соединительной муфты (Jм=0,15Jдв.);
Jш - момент инерции тормозного шкива (Jш=0,2Jдв.);
![]()
![]()
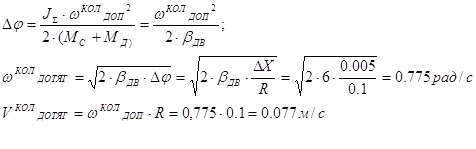
2.3.7 Определяем динамические моменты для построения уточненной нагрузочной диаграммы:
(10)
где J - (см. формулу 8);
- изменение угловой скорости;
t - время разгона механизма;


Mд.х. и Mд.р. - динамические моменты разгона и торможения для холостого и загруженного состояний тележки механизма передвижения.
2.3.8 Строим уточненную нагрузочную диаграмму механизма с тахограммой:
Рисунок 3 - Нагрузочная диаграмма механизма (уточненная).
Рисунок 4 - Тахограмма двигателя.
2.3.9 Проверяем выбранный двигатель по нагреву:
![]()
(11)
Эквивалентный момент вычисляем по формуле 4:

Определяем рабочий момент двигателя:
(12)
![]()
В случае, если двигатель подходит для заданной интенсивности работы, момент эквивалентный на его валу должен быть меньше номинального, т.е. должно выполнятся неравенство 13:
![]()
(13)
![]()
Двигатель выбран правильно.
2.4 Выбор релейно-контактной аппаратуры.
2.4.1 Для управления асинхронным электродвигателем привода используем магнитный контроллер KА-63, т.к. он обеспечивает все необходимые режимы работы для механизма перемещения и подходит по допустимой мощности двигателя.
2.4.2 Для ограничения передвижения кранового моста в схеме использованы конечные выключатели.
Контакты конечных выключателей, как правило, включаются в цепи управления - в цепи катушек контакторов и реле.
В качестве конечных выключателей выбираем получившие наибольшее распространение в крановых установках отечественного производства выключатели серии КУ-700А.
2.4.3 Крановые резисторы предназначены для обеспечения пуска, регулирования скорости и торможения электродвигателей постоянного и переменного тока.
Для выбора пусковых токоограничивающих резисторов определяем значение эквивалентного тока:
(14)
где Iдл.- длительный ток;
Iпв - ток двигателя при некоторой продолжительности включения;
ПВ - значение фактической продолжительности включения , %;
Зная длительный ток выбираем тип ящиков резисторов в роторную цепь: 2ТД.754.054-12.
2.5 Расчет токов уставок и выбор аппаратуры защиты.
2.5.1 Аппаратура защиты уже присутствует во встроенной защитной панели магнитного контроллера, поэтому укажем лишь токовые данные защиты:
а) Ток уставки защитного реле, А: 130;
б) Ток номинальный расцепителя автомата, А: 40;
в) Ток мгновенный отсечки автомата, А: 260;
2.6 Расчет и выбор структуры и сечения кабелей.
2.6.1 Ток ротора больше тока статора и его длительный эквивалент уже определен (расчёт по формуле 14), поэтому цепь статора с меньшим током запитываем кабелем, выбираемым в роторную цепь:
а) Для обеспечения питания роторной цепи выбираем кабель ПВГ (3*10) мм2;
б) Статорную цепь запитываем кабелем ПВГ (3*10) мм2;
в) Управляющую схему запитываем посредством провода марки ПГВ;
г) Конечные выключатели подключаем к схеме управления контрольным четырехжильным кабелем типа КВВГ;
Похожие работы
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... до (1000-1500:1 и выше. Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую является электрический двигатель, который чаще всего управляется при помощи соответствующих ...

... (разгон, замедление) и период движения с установившейся скоростью. Мостовой кран установлен в литейном цеху металлургического производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев