Навигация
Построение математической модели объекта управления
17836
знаков
5
таблиц
22
изображения
1. Построение математической модели объекта управления.
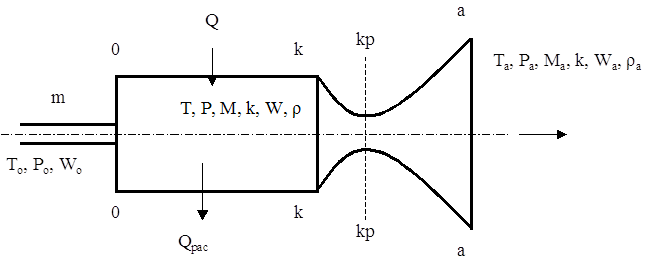
На рис.1 представлена схема бортового прожектора.
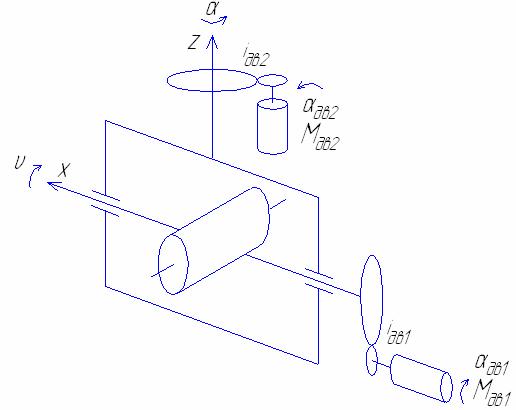
Рис.1 Схема бортового прожектора
Построим математическую модель системы методом Лагранжа.
В целях упрощения математической модели накладываем на систему некоторые допущения:
Все тела системы абсолютно жесткие;
Люфты в редукторе отсутствуют.
Запишем уравнения Лагранжа по следующей формуле
 .
.
Здесь:
![]() - сумма кинетических энергий всех тел системы,
- сумма кинетических энергий всех тел системы,
![]() - обобщенная координата,
- обобщенная координата,
![]() - обобщенная сила инерции,
- обобщенная сила инерции,
![]() - обобщенная скорость.
- обобщенная скорость.
Число степеней свободы рассматриваемой системы равно двум.
За обобщённые координаты принимаем угловые перемещения прожектора вокруг осей x и y. Таким образом, ![]() .
.
Запишем кинетические энергии системы.
Запишем кинетическую энергию второго двигателя
 ,
,
где: ![]() - передаточное отношение второго редуктора;
- передаточное отношение второго редуктора; ![]() - момент инерции второго двигателя.
- момент инерции второго двигателя.
Запишем кинетическую энергию вилки
 ,
,
где: ![]() - момент инерции вилки.
- момент инерции вилки.
Запишем кинетическую энергию первого двигателя.
 ,
,
где: ![]() - передаточное отношение первого двигателя;
- передаточное отношение первого двигателя; ![]() - момент инерции первого двигателя;
- момент инерции первого двигателя; ![]() - масса первого двигателя;
- масса первого двигателя; ![]() - расстояние от центра масс первого двигателя до оси
- расстояние от центра масс первого двигателя до оси ![]() .
.
Запишем кинетическую энергию прожектора
 ,
,
где: ![]() - момент инерции прожектора вокруг оси
- момент инерции прожектора вокруг оси ![]() ;
; ![]() - момент инерции прожектора вокруг оси
- момент инерции прожектора вокруг оси ![]() .
.
 ,
,
где: ![]() - радиус прожектора;
- радиус прожектора; ![]() - длина прожектора.
- длина прожектора.
![]() .
.
![]() .
.
 .
.
 .
.

Запишем сумму кинетических энергий всех тел системы

 .
.

 ;
;
 ;
;
 ;
;
 .
.

![]()
![]() .
.

Определяем работы при малых приращениях
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Ниже представлены уравнения Лагранжа для исследуемой системы


![]() .
.
Проводим линеаризацию полученных уравнений.
Определяемся с номинальным движением
![]() .
.
Принимем
![]() ,
,
где ![]() ,
, ![]() - бесконечно малые приращения.
- бесконечно малые приращения.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
Подставляем полученные соотношения в уравнения Лагранжа.



![]() .
.
Принимаем
![]() ;
;
![]() .
.
Переписываем уравнения относительно отклонений, оставляя только первый порядок малости
 ;
;
 .
.
Получаем окончательные уравнения
 ;
;
 .
.
Похожие работы
... ), 26.07.1982 г. зачислен в списки кораблей ВМФ, 26.11.1982 г. переименован в "Леонид Брежнев", 6.12.1985 г. спущен на воду, 11.08.1987 г. переименован в Тбилиси, а 4.10.1990 г. - в "Адмирал флота Советского Союза Кузнецов". Вступил в строй 2512.1990 г., а 20.01.1991 г. вошёл в состав Краснознамённого Северного флота. Доводочные работы продолжались до 6.05.1991 г. От ТАВКР "Адмирал Горшков" пр. ...

... аэродинамики, такие,как Н. Е. Жуковский, С. А. Чаплыгин, Б. Н. Юрьев, В. В. Голубев, М. В. Келдыш, С. А. Христианович, Г. П. Свищев, В. В. Струминский и многие другие, находились во главе прогресса авиации. Трудность прикладного использования теоретических исследований состояла в том, что теоретические решения могли быть найдены только для отдельных форм профилей, крыльев, тел вращения. Это ...
... оборудование крепить к платформе проволокой диаметром 6-8 мм, на что затрачивается очень много времени (1,5-2 часа) на одну автомашину. Для сокращения (рейсов) сроков перевозки буровой установки БУ 3000 ЭУК-1М в разобранном виде с куста на куст, а также с базы БПТОиКа до кустовой площадки, предлагаю: Контейнерную систему перевозки бурового оборудования, которая представляется в ...
0 комментариев