Навигация
Составление структурных схем каналов системы, синтез регуляторов
17836
знаков
5
таблиц
22
изображения
3. Составление структурных схем каналов системы, синтез регуляторов.
3.1 Составление структурной схемы первого канала, синтез регулятора.
Применим преобразование Лапласа к полученному уравнению Лагранжа
![]() .
.
 .
.
Структурная схема канала 1 показана на рис. 5.
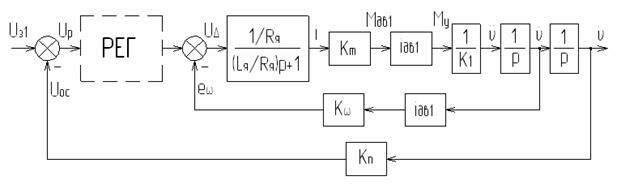
Рис.5 Структурная схема первого канала
На схеме обозначены:
 ;
;
 ;
;
 ;
;
![]() ;
;
 ;
;
 ;
;
 .
.
Подставляем найденные значения в структурную схему.
На рис.6 представлена блок-схема первого канала.
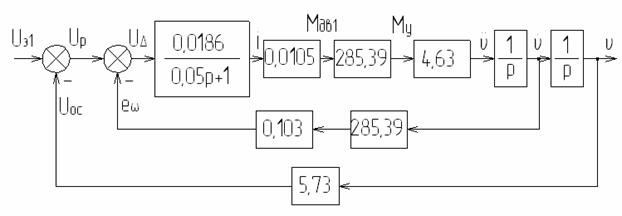
Рис.6 Блок-схема первого канала
На рис. 7 представлена упрощённая блок-схема первого канала.
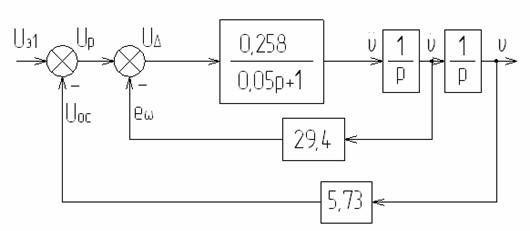
Рис.7 Упрощённая блок-схема первого канала
Ещё более упростим систему, записав единое уравнение для части системы, замкнутой обратной связью с коэффициентом 29,4. Для этого запишем передаточную функцию ![]() по
по ![]() (
(![]() по
по ![]() ).
).
Уравнение разомкнутой системы ![]() .
.
 .
.
Уравнение замкнутой системы:
 .
.
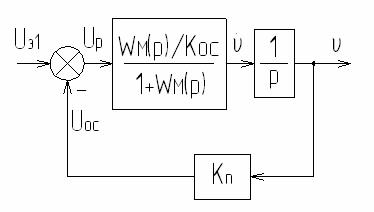
Рис.8 Упрощённая блок-схема первого канала
Запишем окончательную передаточную функцию разомкнутой системы.
![]()


![]() ;
;
![]() ;
;
![]() .
.
Так как ![]() , то имеем колебательное звено. Учитывая что
, то имеем колебательное звено. Учитывая что ![]() , можно пользоваться асимптотическими ЛЧХ колебательного звена, колебания будут малы.
, можно пользоваться асимптотическими ЛЧХ колебательного звена, колебания будут малы.
Находим сопрягающую частоту
 ;
;
![]() .
.
На рис. 9 представлены ЛЧХ нескорректированного первого канала.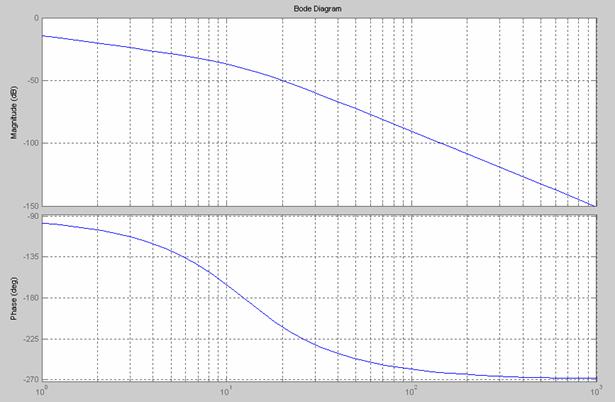
Рис.9 Нескорректированные ЛЧХ первого канала
По ЛАЧХ видно, что нескорректированная система первого канала устойчива, но предъявленные к систем требования по качеству не выполняются. Кривая ЛАЧХ пересекает ось абсцисс на очень низкой частоте, вследствие чего система имеет очень высокое время регулирования. Путём моделирования нескорректированной системы в среде Matlab было установлено, что время регулирования составляет порядка 15 секунд.
Введём в исследуемую систему корректирующие звенья. Рассчитаем их методом синтеза последовательной коррекции. Найдём желаемую частоту среза, исходя из заданных времени регулирования и величины перегулирования.
Желаемую ЛАЧХ построим исходя из следующих соображений. Среднечастотный участок желаемой ЛАЧХ образуется асимптотой с наклоном ![]() , проводимый так, чтобы она пересекала ось частот при
, проводимый так, чтобы она пересекала ось частот при ![]() . Этот участок проводится влево и вправо до достижения модулей, равных по крайней мере
. Этот участок проводится влево и вправо до достижения модулей, равных по крайней мере ![]() . Высокочастотную область можно пустить параллельно исходной ЛАХ. Низкочастотная область желаемой ЛАЧХ также должна по возможности повторять нескорректированную ЛАЧХ.
. Высокочастотную область можно пустить параллельно исходной ЛАХ. Низкочастотная область желаемой ЛАЧХ также должна по возможности повторять нескорректированную ЛАЧХ.
Построенная асимптотическая ЛАЧХ находится в приложении к пояснительной записке.
После построения желаемой ЛАЧХ и ЛФЧХ можно строить ЛАЧХ и ЛФЧХ коррекции, исходя из следующих соотношений:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Ниже представлена вычисленная передаточная функция коррекции.
 .
.
На рис. 10 показаны ЛЧХ скорректированного первого канала.
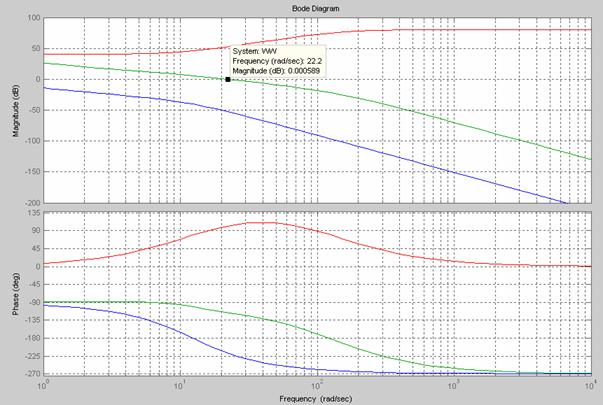
Рис.10 ЛЧХ первого канала
Добавляем коррекцию к уже имеющейся системе, и, для получения переходного процесса, смоделируем её в программе Matlab.
На рис.11 показан переходной процесс для первого канала исследуемой системы.
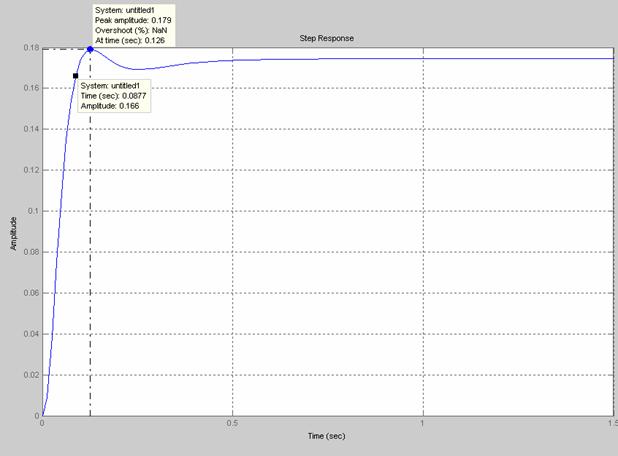
Рис. 11 Реакция на единичный скачок первого канала
Было установлено:
![]() ;
;
![]() .
.
Таким образом, можно сказать, что скорректированная система удовлетворяет всем предъявленным требованиям по качеству и быстродействию.
Рассчитаем корректирующие звенья для первого канала. По виду передаточной функции коррекции определяем, что нам потребуется две одинаковых дифференцирующих цепочки. Также необходимо включить последовательно с ними некоторое количество усилителей, коэффициент усиления которых мы найдём позднее.
Схема пассивного дифференцирующего звена показана на рис.12.
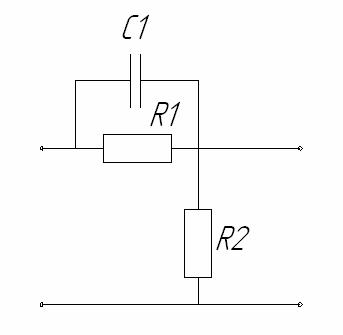
Рис.12 Схема пассивного дифференцирующего звена
 , (
, (![]() ),
),
где,  - коэффициент передачи дифференцирующего звена.
- коэффициент передачи дифференцирующего звена.
![]() ;
;
 .
.
Пусть ![]() , тогда
, тогда
 ,
,
![]() ,
,
![]() ;
;
 ,
,
![]() ;
;
![]() .
.
Рассчитаем дополнительный коэффициент усиления, требуемый для сигнала, ослабленного дифференцирующим звеном
 .
.
Рассчитаем общий коэффициент усиления рассчитанного регулятора
![]() .
.
На рис. 13 показана схемная реализация рассчитанного регулятора.
Рис. 13 Схема регулятора
Распределим полученный коэффициент усиления по усилителям. Первый усилитель включён по вычитающей схеме, и также будет усиливать сигнал. Второй усилитель включён как повторитель, он нужен только для ослабления влияния второго дифференцирующего звена на первый, это достигается благодаря огромному входному сопротивлению операционных усилителей, на основе которых построены усилители. Третий усилитель представляет собой мощный операционный усилитель с высоким выходным током, достаточным для пуска двигателя.
Распределим вычисленный коэффициент усиления регулятора по двум усилителям
![]() .
.
Похожие работы
... ), 26.07.1982 г. зачислен в списки кораблей ВМФ, 26.11.1982 г. переименован в "Леонид Брежнев", 6.12.1985 г. спущен на воду, 11.08.1987 г. переименован в Тбилиси, а 4.10.1990 г. - в "Адмирал флота Советского Союза Кузнецов". Вступил в строй 2512.1990 г., а 20.01.1991 г. вошёл в состав Краснознамённого Северного флота. Доводочные работы продолжались до 6.05.1991 г. От ТАВКР "Адмирал Горшков" пр. ...

... аэродинамики, такие,как Н. Е. Жуковский, С. А. Чаплыгин, Б. Н. Юрьев, В. В. Голубев, М. В. Келдыш, С. А. Христианович, Г. П. Свищев, В. В. Струминский и многие другие, находились во главе прогресса авиации. Трудность прикладного использования теоретических исследований состояла в том, что теоретические решения могли быть найдены только для отдельных форм профилей, крыльев, тел вращения. Это ...
... оборудование крепить к платформе проволокой диаметром 6-8 мм, на что затрачивается очень много времени (1,5-2 часа) на одну автомашину. Для сокращения (рейсов) сроков перевозки буровой установки БУ 3000 ЭУК-1М в разобранном виде с куста на куст, а также с базы БПТОиКа до кустовой площадки, предлагаю: Контейнерную систему перевозки бурового оборудования, которая представляется в ...
0 комментариев