Навигация
Выбор типа приводного двигателя
17836
знаков
5
таблиц
22
изображения
2. Выбор типа приводного двигателя.
Требуемую мощность двигателя определяем по формуле
![]()
![]() ,
,
где: ![]() - требуемый вращающий момент на выходном валу двигателя;
- требуемый вращающий момент на выходном валу двигателя; ![]() - частота вращения объекта, приводимого в движение двигателем.
- частота вращения объекта, приводимого в движение двигателем.
![]() ,
,
где: ![]() - момент инерции всех тел, приводящихся в движение двигателем;
- момент инерции всех тел, приводящихся в движение двигателем; ![]() - угловое ускорение этих тел.
- угловое ускорение этих тел.
Зададим синусоидальное входное воздействие
![]() ;
;
![]() ;
;
![]() .
.
Требуемую мощность двигателя будем вычислять по формуле
![]() .
.
Вычисляем требуемую мощность первого двигателя
![]() .
.
 .
.
![]() - для первого двигателя равняется половине диапазона регулирования по углу места.
- для первого двигателя равняется половине диапазона регулирования по углу места.
![]() .
.
 .
.
![]() .
.
По найденной требуемой мощности двигателя из справочной литературы был выбран двигатель ДПМ-25-Н1-04 со следующими характеристиками:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Вычисляем требуемую мощность второго двигателя.
![]()
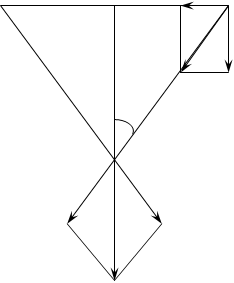
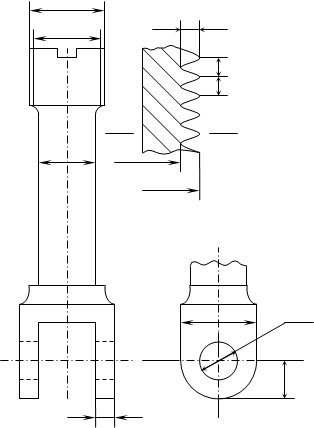
Вычисляем момент инерции вилки. Конструкция вилки упрощённо показана на рис. 2.
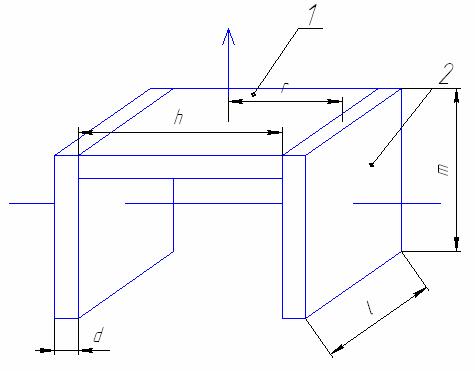
Рис. 2 Схема вилки
Примерно определимся с размерами вилки.
Принимаем
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Вычисляем объём составных частей вилки
![]() ,
,
![]() .
.
Вычисляем массы составных частей вилки
![]() ,
,
![]() .
.
Момент инерции вилки найдём как сумму моментов инерции верхней части вилки и боковин.
Верхняя часть вилки показана на рис. 3.
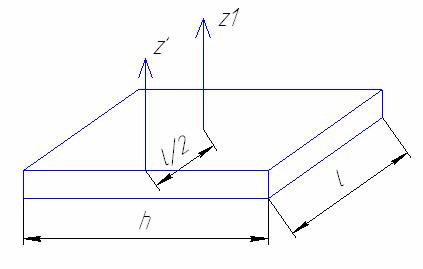
Рис.3 Верхняя часть вилки
Определяем момент инерции верхней части вилки, при этом пользуемся известной теоремой Штейнера-Гюйгенса
 .
.

![]() .
.
Боковина вилки показана на рис.4.
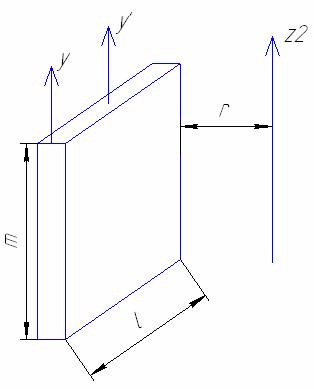
Рис.4 Боковина вилки
Определяем момент инерции боковины вилки
![]() ,
,
![]() ,
,
 .
.
Определяем момент инерции вилки
![]() .
.
Масса вилки
![]() .
.
![]() .
.
![]() .
.
![]() .
.
По найденной требуемой мощности двигателя из справочной литературы был выбран двигатель ДПМ-25-Н1-07 со следующими характеристиками:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Вычисляем скорости вращения валов прожектора.
Вычисляем скорость вращения прожектора вокруг оси x.

![]()
![]()
Вычисляем скорость вращения прожектора вокруг оси z.
 .
.
![]() .
.
![]() .
.
 .
.
Похожие работы
... ), 26.07.1982 г. зачислен в списки кораблей ВМФ, 26.11.1982 г. переименован в "Леонид Брежнев", 6.12.1985 г. спущен на воду, 11.08.1987 г. переименован в Тбилиси, а 4.10.1990 г. - в "Адмирал флота Советского Союза Кузнецов". Вступил в строй 2512.1990 г., а 20.01.1991 г. вошёл в состав Краснознамённого Северного флота. Доводочные работы продолжались до 6.05.1991 г. От ТАВКР "Адмирал Горшков" пр. ...

... аэродинамики, такие,как Н. Е. Жуковский, С. А. Чаплыгин, Б. Н. Юрьев, В. В. Голубев, М. В. Келдыш, С. А. Христианович, Г. П. Свищев, В. В. Струминский и многие другие, находились во главе прогресса авиации. Трудность прикладного использования теоретических исследований состояла в том, что теоретические решения могли быть найдены только для отдельных форм профилей, крыльев, тел вращения. Это ...
... оборудование крепить к платформе проволокой диаметром 6-8 мм, на что затрачивается очень много времени (1,5-2 часа) на одну автомашину. Для сокращения (рейсов) сроков перевозки буровой установки БУ 3000 ЭУК-1М в разобранном виде с куста на куст, а также с базы БПТОиКа до кустовой площадки, предлагаю: Контейнерную систему перевозки бурового оборудования, которая представляется в ...
0 комментариев