Анализ технологического процесса как объекта управления
Классификация и перечень технологических переменных анализ взаимодействия между технологическими процессами
Разработка и выбор элементов АСУ ТП
Функциональная структура системы управления ТП описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структура и параметрический синтез регуляторов системы управления ТП
Навигация
Разработка и выбор элементов АСУ ТП
Автоматическая система управления процессом передвижения пассажирского лифта
48573
знака
1
таблица
19
изображений
2. Разработка и выбор элементов АСУ ТП
2.1 Разработка общих алгоритмов функционирования АСУ технологическим процессом. Блок схемы алгоритмов и их описания
Центральной частью блока управления является микропроцессор TMS320F2812 фирмы Texas Instruments «USA». В основу принципа работы электронного селектора положен метод тактового опроса всех устройств (датчиков), контролирующих положение кабины лифта в шахте, а также всех кнопок вызывных и приказных постов. К устройствам, контролирующим положение кабины в шахте, относятся датчики верхнего и нижнего этажей (ДВЭ и ДНЭ) датчик точной остановки ДТО, датчики замедления вверх ДчЗВв и вниз – ДчЗВн. Датчики ДТО, ДчЗВв и ДчЗВн установлены на кабине лифта. Они взаимодействуют с шунтами расположенными в шахте лифта в зонах замедления и точной остановки у каждой остановочной площадки (реализуется счётный принцип определения положения кабины в шахте).
Микропроцессор с помощью программы, записанной в запоминающем устройстве организует цикл из определенного количества тактовых импульсов, достаточного для опроса всех датчиков и кнопок вызова и приказа.
Счет этажей осуществляется микропроцессором при движении кабины вниз по сигналам от датчика замедления вниз, а при движении кабины снизу вверх – по сигналам от датчика замедления вверх.
Последовательность опроса устройств – строго определена. Микропроцессор чётко фиксирует номер импульса, который он посылает. За каждым номером импульса закреплено одно определенное устройство, вследствие чего микропроцессор «знает, какое устройство в данный момент опрашивает. Для выделения при действии тактового импульса опроса сигнала от соответствующего ему опрашиваемого устройства используются мультиплексоры (в блоке управления их несколько для обслуживания нужного количества опрашиваемых устройств). При этом на информационные выходы подключены выходы опрашиваемых устройств, а появление на его выходе одного из этих сигналов определяется подаваемым на адресные входы трёхразрядным двоичным кодом.
Двоичный код, управляющий работой мультиплексора, формируется на выходах двоичного счётчика. Тактовые импульсы поступают на счётчик с передающего выхода микропроцессора ТХД, т.е. на счётный вход счётчика последовательно подаются опросные импульсы. По окончании цикла опроса счётчик (в блоке 1 их два для подсчёта всего количества импульсов в цикле опроса) сбрасывается в исходное состояние.
Рассмотрим последовательность действия блока в момент включения лифта. После включения прежде всего в микропроцессор вводится число, определяющее этажность здания. Код этажности набирается на отдельном мультиплексоре на выводах которого при установке лифта набирается нужный двоичный код. Микропроцессор поочередно подключает выводы этого мультиплексора к своему входу INTO, который используется в данной схеме не как вход внешних прерываний, а как вход, предназначенный только для опроса количества этажей в здании.
После определения количества этажей лифт совершает калибровочный рейс на первый этаж при первом нажатии на любую кнопку вызова или приказа (если лифт не находится на первом этаже).
Если, например, при стоящей на первом этаже свободной кабине поступает вызов с первого этажа, то этот сигнал через мультиплексор 2 поступает на вход микропроцессора RXD – стандартный вход приемника сигналов. Микропроцессор составляет события, а именно то, что на запрос о состоянии вызывной кнопки первого этажа пришел импульс от этой кнопки, свидетельствующий о наличии вызова, и формирует на порте PO адрес, по которому из запоминающего устройства 4 поступают команды о дальнейших действиях, выявляется совпадение этажа вызова с этажом положения кабины, и на выходе RD микропроцессора формируется сигнал (в данной схеме выходы WR и RD используются как одиночные разряды порта, служащие для включения реле управления вверх и вниз, а также реле открывания дверей), который после усиления поступает на выход «откр.дверей».
Предположим, что пассажир вошел в кабину и нажал кнопку приказа пятого этажа. В цикле опроса за кнопки вызова и приказа пятого этажа отвечает в данном случае 13-й импульс. При появлении на выходе TXL микропроцессора 13-го по счету импульса он попадает на счётный вход счётчика 1, двоичный код на выходе которого включает канал мультиплексора 2, на входе которого подключен сигнал от кнопки приказа пятого этажа, и с выхода мультиплексора этот сигнал поступает на вход RXD приемника сигналов микропроцессора. Далее, как описано выше, микропроцессор обрабатывает этот сигнал и формирует сигнал на выходе WR, который после усиления поступает на выход «вверх» и обеспечивает включение реле управления вверх в релейной части схемы. При движении вверх счёт этажей осуществляется по датчикам замедления вверх. По прибытии на этаж назначения и выходе всех пассажиров из кабины в блок электронного селектора подается сигнал «Сброс», по которому снимаются сформированные ранее сигналы управления, и лифт готов к движению по вызову или приказу. При движении кабины лифта микропроцессор при помощи мультиплексоров непрерывно опрашивает датчики замедления вверх и вниз, датчик точной остановки, датчики крайних этажей, кнопки вызовов и приказов. Информация, поступающая от этих устройств, обрабатывается микропроцессором, который в соответствии с записанной в запоминающем устройстве программой формирует требуемые сигналы управления.
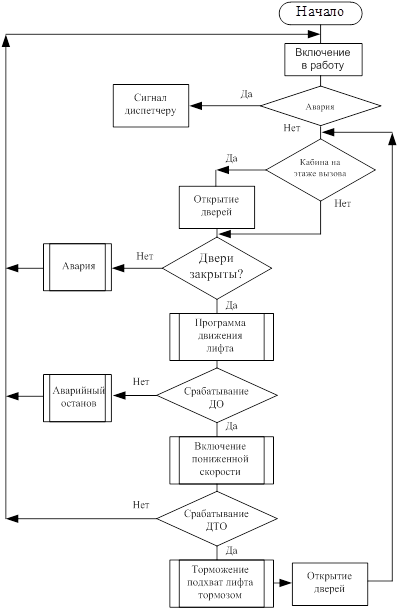
Рисунок 3 – Общий алгоритм функционирования системы управления пассажирским лифтом в режиме «Нормальная работа»
На рисунке 3 приведена блок-схема программы управления лифтом в режиме «Нормальная работа». При закрытых дверях с помощью программы, записанной в запоминающем устройстве, осуществляется опрос постов вызова, и при появлении вызова, проверяется условие нахождения кабины лифты на том же этаже вызова. Если это условие не выполняется, то осуществляется переход к программному блоку «Выбор направления», а при его выполнении формируется сигнал «Открыть дверь». После открывания дверей по завершении выдержки времени или при поступлении сигнала приказа обеспечивается закрывание дверей, решается задача выбора направления движения с учётом взаимного положения этажа назначения и этажа исходного положения кабины. В соответствии с результатами этого выбора включается привод для движения кабины в нужном направлении. В процессе движения кабины осуществляется проверка условия совпадения положения кабины с этажом назначения. При выполнении этого условия формируется сигнал замедления и остановки кабины, открываются двери, дальше управление осуществляется аналогично описанному.
Аналогичные программы формируются для обеспечения работы лифта в других режимах (с учётом особенностей работы в этих режимах). Правда, управление в «Режиме ревизии» обычно выполняют без участия микропроцессорной системы для обеспечения большей безопасности (алгоритм управления в этом режиме достаточно прост а возможность управления в крыши кабины не должна зависеть от работоспособности микропроцессорной системы). При использовании режима группового управления вводят дополнительные программные блоки, выполнение которых зависит от принятого при этом алгоритма управления.
Похожие работы
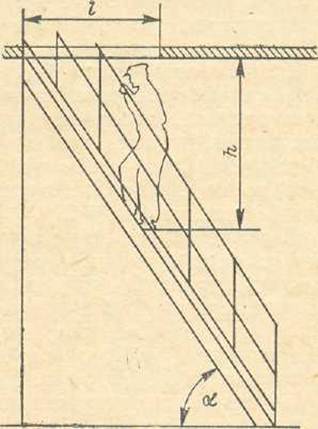
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...
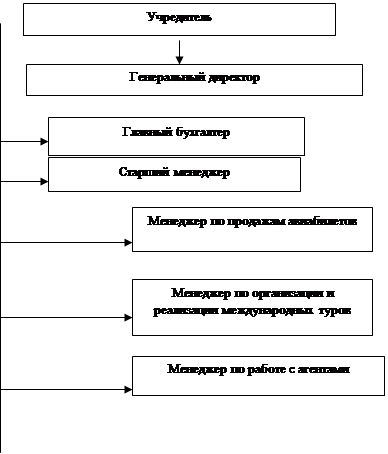
... операциях размещения и приема турецкой стороной при превышении плановых возможностей приема туристов со стороны прямого турецкого партнера ЧП "Аджунавиа-тур". Глава 3. Совершенствование системы управления международным туризмом чп "аджунавиа-тур" 3.1. Обоснование конкурентной привлекательности разработки нового туристического направления в деятельности ЧП "АДЖУНАВИА-ТУР" Настоящее и ...
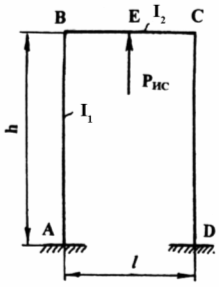
... в заделке (точка В) и момента в точке приложения нагрузки от канатной подвески (точка Е) (2.5) В реальных конструкциях лифтов величина Км ≥ 10, поэтому доля влияния моментов в узлах соединения балок со стойками очень мала, что делает вполне оправданным упрощенный расчет балок и стоек каркаса. 2.1.3 Устройство и расчет пола кабины Горизонтальная рама каркаса ...
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
0 комментариев