Анализ технологического процесса как объекта управления
Классификация и перечень технологических переменных анализ взаимодействия между технологическими процессами
Разработка и выбор элементов АСУ ТП
Функциональная структура системы управления ТП описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структура и параметрический синтез регуляторов системы управления ТП
Навигация
Функциональная структура системы управления ТП описание функциональных блоков системы
Автоматическая система управления процессом передвижения пассажирского лифта
48573
знака
1
таблица
19
изображений
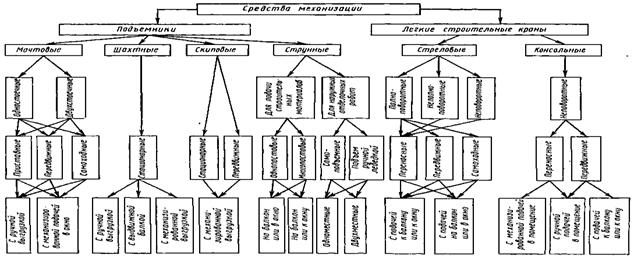
2.2 Функциональная структура системы управления ТП описание функциональных блоков системы
Схема системы управления в режиме нормальной работы представлена на рисунке 4.
В схеме приняты следующие обозначения: ПЛ – привод лифта, ПД – привод дверей, ПВП – посты вызовов и приказов, УРПВ – узел регистрации приказов и вызовов, УВНД – узел выбора направления движения, УОПК – узел определения положения кабины, УЗО – узел замедления и остановки, ДПД – датчики положения дверей, ДСЛ – датчики состояния лифта, УБЗ – узел блокировок и защиты, УВВ – узел выдержки времени, УОЗД – узел открывания и закрывания дверей, ПСУ – позиционно-согласующие устройство, СВ – сигнал движения вверх, СН – сигнал движения вниз, СБ – сигнал большой скорости, СМ – сигнал малой скорости, СЗД – сигнал закрывания дверей, СОД – сигнал открывания дверей, СВВ – сигнал выдержки времени, СВП – сигналы о вызовах и приказах, СНПК – сигнал о наличии пассажира в кабине, СПЗК – сигнал о полной загрузке кабины, СПГЛ – сигнал о прегрузке кабины; СРРЛ –сигнал регулирования разгона лифта; УОЗК – узел определения загрузки кабины, СПК – сигнал положения кабины.
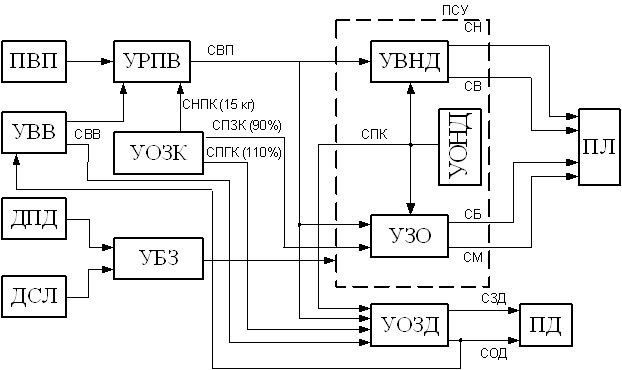
Рисунок 4 – Функциональная структура управления
2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ
Для управления технологическим процессом передвижения пассажирского лифта необходимо наличие трёх уровней управления.
Верхний уровень
В последнее время наблюдается тенденция к оснащению зданий сложным инженерным и коммуникационным оборудованием. Появляется необходимость вести наблюдение за основными системами жизнеобеспечения здания для предупреждения и быстрого реагирования на неисправности. Данную задачу позволяет решить автоматизированная система контроля, управления и диспетчеризации (АСКУД). Её также можно назвать как сервер ЖКХ. В частности для лифтового оборудования АСКУД позволяет:
контролировать положение кабины лифта в режиме реального времени
формировать отчеты о простоях, неисправностях, техническом обслуживании
контролировать доступ в шахту или машинное помещение
контролировать выход лифтового оборудования из строя
В диспетчерскую приходит вся информация с лифтов подключённых к системе. Диспетчер по полученным данным может направить бригаду на ремонт вышедшего из строя оборудования.
На базе обычной SCADA системы реализован диалог взаимодействия диспетчера и поступающих данных. Также ведётся журнал событий в течение месяца.
Средний уровень
На среднем уровне происходит реализация локальных управляющих алгоритмов (управление приводом);
взаимодействие между технологическими объектами управления;
информационный обмен с уровнем III.
Для реализации перечисленных функций применяем универсальный сервоконтроллер ELESY PCI-Servo 4 производства фирмы «ЭЛЕСИ» Россия.
Контроллер предназначен для измерения непрерывных сигналов, представленных напряжением постоянного тока и (или) постоянным током, сбора и обработки информации с первичных датчиков, формирования сигналов управления по заданным алгоритмам, приема и передачи информации по последовательным каналам связи в системах измерения, контроля и управления объектами.
Основная область применения – системы управления перемещением технологического оборудования в соответствии с заданной программой движения.
Нижний уровень
Нижний уровень АСУ ТП состоит из преобразователя частоты ESD-TCL фирмы «ЭЛЕСИ», который является специальной разработкой для управления безредукторным асинхронным приводом лифтовой лебёдки; источник питания Siemens LOGO для подачи напряжения питания 24В;
датчик положения, определяющий точное местонахождение кабины в шахте; два механических нормально замкнутых тормоза; посты вызовов и приказов; конечные выключатели «верхний этаж» и «нижний этаж».
На дискретные входы сервоконтроллера подаются команды с постов вызовов и приказов, сигналы о нахождении лифта в верхнем и нижнем положении в шахте, сигналы открывания закрывания дверей кабины лифта, сигналы аварий.
2.4 Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы
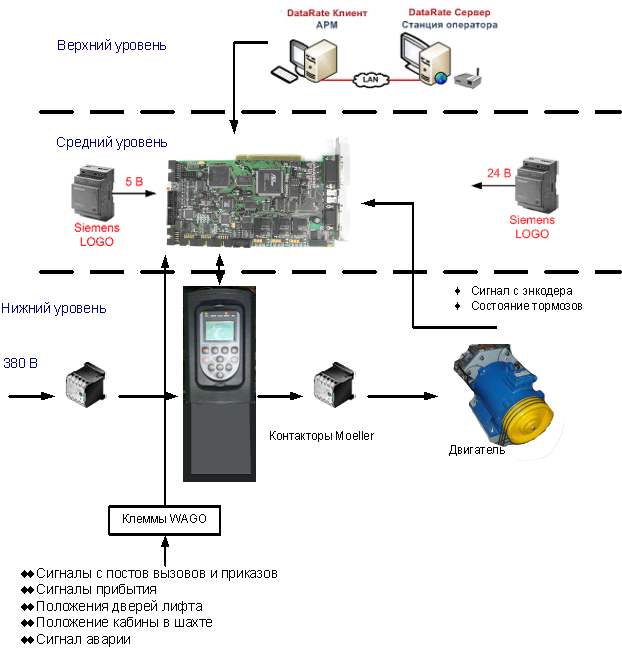
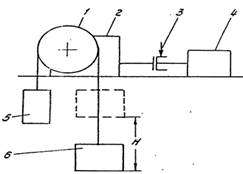
Рисунок 5 - Блок-схема соединения аппаратных средств уровней управления АСУ ТП
2.5 Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП
Для сервоконтроллера ELESY PCI-Servo 4 используется следующее программное обеспечение.
Драйвер под Windows XP/2000/NT.
Утилита для конфигурирования параметров сервоконтроллера с возможностью тестирования периферии.
DLL библиотека с поддержкой набора функций управления сервоконтроллером.
Примеры программирования сервоконтроллера на Borland Delphi, C++ Builder.
Преобразователь частоты реализует векторное управление двигателем, программа работы написана в среде Code Composer Studio v3.1.
2.6 Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена
Обмен информацией между верхним (АРМ оператора) и средним уровнем осуществляется посредством локальной сети PROFIBUS-DP по интерфейсу RS-485.
Похожие работы
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...
... операциях размещения и приема турецкой стороной при превышении плановых возможностей приема туристов со стороны прямого турецкого партнера ЧП "Аджунавиа-тур". Глава 3. Совершенствование системы управления международным туризмом чп "аджунавиа-тур" 3.1. Обоснование конкурентной привлекательности разработки нового туристического направления в деятельности ЧП "АДЖУНАВИА-ТУР" Настоящее и ...
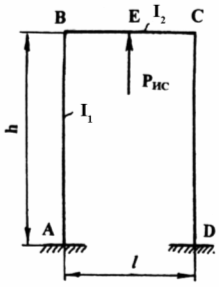
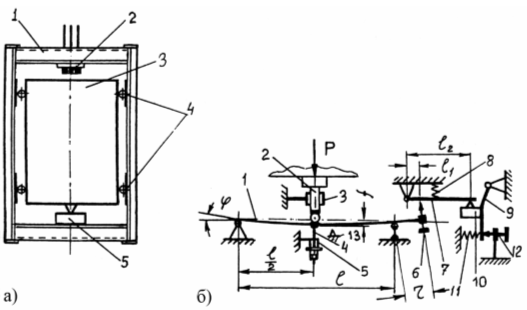
... в заделке (точка В) и момента в точке приложения нагрузки от канатной подвески (точка Е) (2.5) В реальных конструкциях лифтов величина Км ≥ 10, поэтому доля влияния моментов в узлах соединения балок со стойками очень мала, что делает вполне оправданным упрощенный расчет балок и стоек каркаса. 2.1.3 Устройство и расчет пола кабины Горизонтальная рама каркаса ...
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
0 комментариев