Навигация
Анализ системы автоматического регулирования угловой скорости вращения турбины
13875
знаков
1
таблица
18
изображений
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ОМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Авиа- и ракетостроение»
Специальность 160801- «Ракетостроение»
Курсовая работа
по дисциплине «Теория автоматического регулирования»
АНАЛИЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ТУРБИНЫ
Выполнил: студент
гр.
Руководитель:
Омск 2007
Задание
1. Написать уравнения, передаточный функции элементов. Составить структурную схему. Определить передаточные функции разомкнутой, замкнутой систем и передаточную функцию по ошибке.
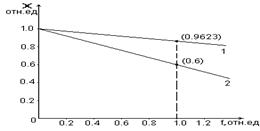
2. Построить частотные характеристики (АЧХ, ФЧХ) системы, ЛАЧХ разомкнутой системы, переходную характеристику.
3. Исследовать систему на устойчивость. Определить запасы устойчивости.
4. Определить коэффициенты ошибок. Найти установившуюся ошибку Dx(t) при функции входного сигнала xВХ(t) = 1; t; t2.
5. Определить показатели качества (время регулирования, перерегулирование, колебательность переходного процесса).
6. Определить параметры корректирующего звена, обеспечивающие наибольшее быстродействие при достаточном запасе устойчивости (по амплитуде не менее 6 дБ, по фазе не менее ![]() ).
).
Исходные данные
| Звено | Параметр | Значение |
| Гидротурбина |
| 5 |
|
| 1 | |
|
| 0,2 | |
| Гидропривод |
| 0,001 |
|
| 1000 | |
| Центробежный тахометр |
| 0,1 |
|
|
| |
|
| 0,1 | |
| Изодром |
| 0,03 |
| Редуктор |
| 1 |
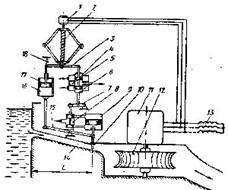
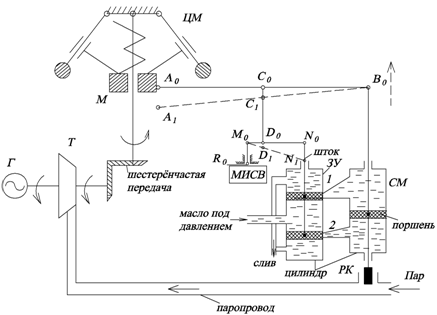
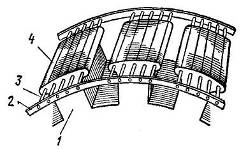
Рис.1. Система автоматического регулирования угловой скорости вращения гидротурбины
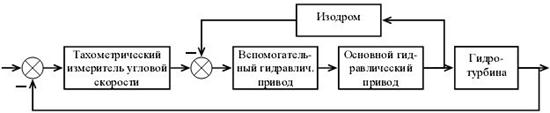
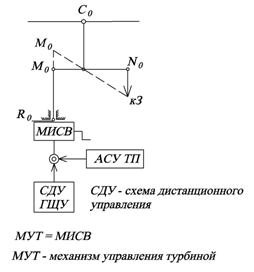
Рис.2. Блок-схема системы автоматического регулирования угловой скорости вращения гидротурбины
Выполнение работы
1. Передаточные функции элементов системы (звеньев)
Это выполняется в два действия:
- Из исходного дифференциального уравнения элемента САУ получить уравнение в операторной форме. Это выполняется путем замены производной ![]() оператором дифференцирования p.
оператором дифференцирования p.
- Из полученного алгебраического уравнения выразить отношение выходной величины к входной. Это отношение равно передаточной функции.
Центробежный тахометр
Уравнение элемента: ![]() .
.
Уравнение в операторной форме:
![]() .
.
Входным сигналом является угловая частота вращения ![]() , выходным – перемещение нижней муфты
, выходным – перемещение нижней муфты ![]() . Получим передаточную функцию:
. Получим передаточную функцию:
![]() .
.
Вспомогательный гидропривод
Так как по условию перемещение гидроусилителя 6 равно перемещению золотника 4, т.е. значения входного и выходного сигналов равны, то ![]() .
.
Основной гидропривод
Уравнение элемента: ![]() .
.
Уравнение в операторной форме:
![]() .
.
Входным сигналом является перемещение штока золотника ![]() , выходным – перемещение штока поршня
, выходным – перемещение штока поршня ![]() . Получим передаточную функцию:
. Получим передаточную функцию:
![]() .
.
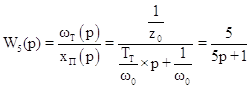
Изодром
Уравнение элемента:
![]() .
.
Уравнение в операторной форме:
![]() .
.
Входным сигналом является перемещение цилиндра изодрома ![]() , выходным – перемещение штока поршня
, выходным – перемещение штока поршня![]() . Получим передаточную функцию:
. Получим передаточную функцию:
![]() .
.
Гидротурбина
Уравнение элемента:
![]() .
.
Уравнение в операторной форме:
![]() .
.
Входным сигналом является перемещение задвижки ![]() , выходным –угловая скорость вращения вала гидротурбины
, выходным –угловая скорость вращения вала гидротурбины ![]() . Получим передаточную функцию:
. Получим передаточную функцию:
 .
.
Усилитель
![]() - коэффициент усиления (скорость двигателя 1 в 20 раз выше скорости гидротурбины 12).
- коэффициент усиления (скорость двигателя 1 в 20 раз выше скорости гидротурбины 12).
Редуктор
![]() .
.
Структурная схема системы регулирования будет выглядеть следующим образом:
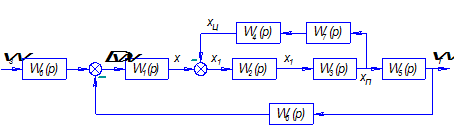
Рис. 1. Структурная схема системы автоматического регулирования угловой скорости вращения гидротурбины
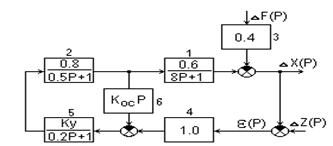
Изобразим структурную схему с учётом исходных данных:
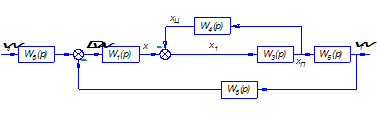
Рис. 2. Структурная схема САУ
Проведём преобразования структурной схемы.
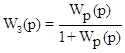
Объединим звено с передаточной функцией ![]() со звеном отрицательной обратной связи
со звеном отрицательной обратной связи ![]() :
:
![]() .
.
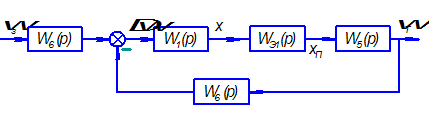
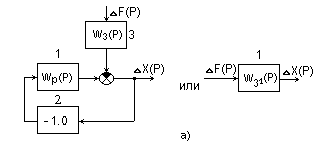
Перенесём сумматор с правой стороны усилителя (![]() ) в левую, добавив в цепь обратной связи звено
) в левую, добавив в цепь обратной связи звено ![]() .
.
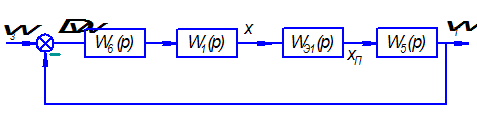
Объединим последовательные звенья:
![]()
Передаточная функция эквивалентного звена ![]() является передаточной функцией разомкнутой системы:
является передаточной функцией разомкнутой системы:
![]()
Передаточная функция замкнутой системы:
![]() .
.
В общем виде
![]() , (74)
, (74)
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Передаточная функция по ошибке:
![]() .
.
![]()
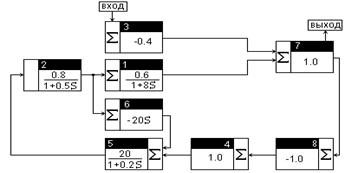
Модель данной системы, составленная в MATLAB / SIMULINK , имеет следующий вид:
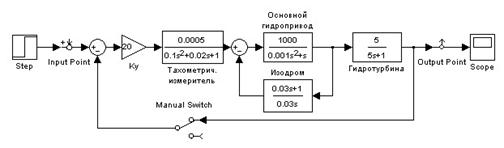
Рис. 3. Модель замкнутой САУ, составленная в MATLAB / SIMULINK
Для проверки корректности модели следует подать на вход системы какой-либо сигнал и посмотреть поведение выходного сигнала. В качестве входного используем ступенчатый сигнал (блок Step), выходной сигнал выведем на график с помощью осциллографа Scope.
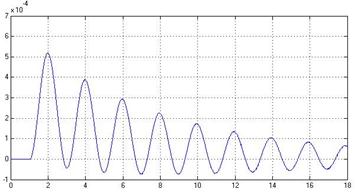
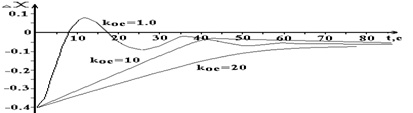
Рис. 4. Результат работы модели САУ в MATLAB / SIMULINK
Похожие работы



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
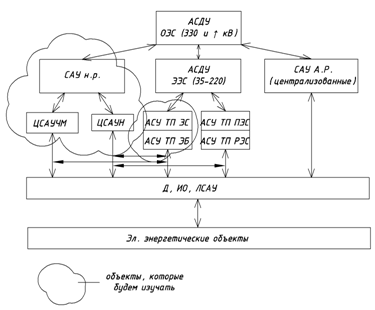
... ЛСАУ. ЦСАУЧМ – централизованная САУ частотой и мощностью; ЦСАУН -- централизованная САУ напряжением (управл. U и Q) В состав автоматизированного технологического управления эл. эн. системы кроме автоматизированных систем управления входят и автоматические системы управления. Есть 2 группы таких систем: САУ нормальным и САУ аварийным режимами (Н.Р. и А.Р,). Устойчивость параллельной работы ...
... приведены краткие выводы о свойствах исследуемой системы, числовые значения показателей качества управления, их оценка и, по возможности, рекомендации по их улучшению. ЛИТЕРАТУРА 1. Коротков В.Ф. Основы линейной теории автоматического управления в задачах электроэнергетики: Учебное пособие с компьютерным лабораторным практикумом АОС - ТАУ / Иван. Гос. Энерг. ун-т. - Иваново, 1994. - 392 с. ...
... особенностью машины постоянного тока является наличие коллектора и скользящего контакта между обмоткой якоря и внешней электрической цепью. 2.2 Устройство машины постоянного тока Машина постоянного тока (рис. 2.3) по конструктивному исполнению подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения – на статоре. Основное отличие заключается ...
0 комментариев