СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ
ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПО РАСПОЛОЖЕНИЮ НУЛЕЙ И ПОЛЮСОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ В КОМПЛЕКСНОЙ ПЛОСКОСТИ
ЗАПАС УСТОЙЧИВОСТИ
ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАБОТЫ
Содержание задания
Содержание задания
Передаточные функции элементов структурной схемы
Передаточные функции элементов структурной схемы
Навигация
Теория автоматического управления
Теория автоматического управления
47347
знаков
19
таблиц
22
изображения
Министерство образования Российской Федерации
Ивановский государственный энергетический университет
кафедра АУЭС
Методические указания
к выполнению курсовой работы по дисциплине
“Теория автоматического управления”
(для студентов спец. 210400)
Иваново 2000
Составитель В.Ф. КОРОТКОВ
Редактировал А.А. ФОМИЧЕВ
Методические указания предназначены для студентов специальности 210400 "Автоматическое управление электроэнергетическими системами".
Утверждены цикловой методической комиссией ЭЭФ.
РЕЦЕНЗЕНТ
кафедра автоматического управления электроэнергетическими системами Ивановского государственного энергетического университета
СОДЕРЖАНИЕ
1. ЦЕЛИ И ЗАДАЧИ
2. ОБЩИЕ ЗАМЕЧАНИЯ
3. СТРУКТУРНАЯ СХЕМА САУ
4. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
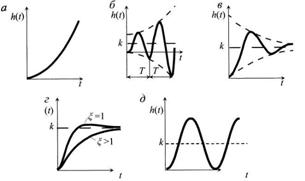
5. ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
6. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ
7. ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПО РАСПОЛОЖЕНИЮ НУЛЕЙ И ПОЛЮСОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ В КОМПЛЕКСНОЙ ПЛОСКОСТИ
8. ОБЛАСТЬ УСТОЙЧИВОСТИ
9. ЗАПАС УСТОЙЧИВОСТИ
10. ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАБОТЫ
ЛИТЕРАТУРА
ПРИЛОЖЕНИЕ
1. ЦЕЛИ И ЗАДАЧИ
Целью курсовой работы является закрепление и обобщение знаний, полученных студентами специальности 210400 при изучении дисциплины “Теория автоматического управления”, приобретение умений и навыков в использовании этих знаний при самостоятельном решении практических задач.
Задачи:
- обеспечить связь общей теории автоматического управления с конкретными проблемами автоматического управления в электроэнергетических системах;
- продемонстрировать влияние значений параметров на динамические и частотные свойства системы автоматического управления (САУ), а также на её устойчивость ;
- обеспечить получение умений и навыков в исследовании основных характеристик и показателей качества САУ.
2. ОБЩИЕ ЗАМЕЧАНИЯ
Объектом исследований в курсовой работе является фрагменты реальных САУ, используемых в электроэнергетике. Параметры САУ, задаваемых в качестве исходных данных, также близки к реальным и их различия в отдельных вариантах заданий определяется в основном необходимостью получения определенного числа вариантов.
Задания (см. Приложение) к курсовой работе в общем случае предполагают необходимость выполнения следующих работ:
- составление и преобразование структурной схемы замкнутой САУ и получение эквивалентной передаточной функции;
- обеспечение заданных статических характеристик САУ, в частности, заданного значения коэффициента статизма;
- исследование переходной характеристики САУ при заданном воздействии на входе и оценка динамических свойств (перерегулирование, время переходного процесса и др.);
- оценка частотных свойств САУ на основе частотных характеристик;
- расчёт и построение области устойчивости САУ в пространстве заданных параметров;
- определение запаса устойчивости САУ по модулю и по фазе.
При расчёте характеристик САУ предполагается возможность использования компьютерных программ “Classic” (переходные и частотные характеристики) и “Расчёт областей устойчивости”.
3. СТРУКТУРНАЯ СХЕМА САУ
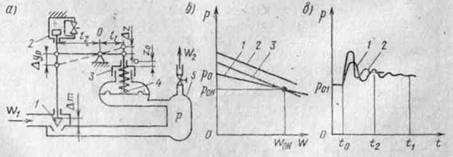
Структурная схема САУ составляется с учётом заданных передаточных функций элементов САУ и их параметров. Она изображается в виде связанных между собой звеньев, с указанием их передаточных функций, точек приложения задающих и возмущающих воздействий, элементов суммирования и управляемой величины на выходе (см., например, рис.3.1)
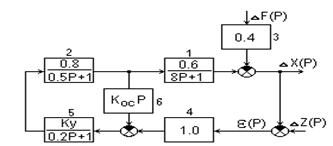
Рис.3.1. Пример структурной схемы САУ:
Dx(р) - изображение отклонения управляемой величины;
DZ(р)- изображение отклонения задающего воздействия;
DF(р) - изображение отклонения возмущающего воздействия.
De(p) - изображение ошибки воспроизведения задающего воздействия.
Звенья и соответствующие им передаточные функции нумеруются арабскими цифрами.
Если какой-либо параметр звена не задан и его значение предстоит выбрать в ходе работы, то в выражении передаточной функции звена он записывается в виде символа (например, Ку, Кос, и т.п.).
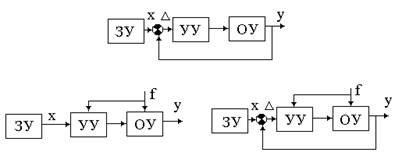
На основе правил эквивалентного преобразования структурная схема представляется в виде одного звена с эквивалентной передаточной функцией и с обязательным указанием рассматриваемого воздействия на входе и управляемой величины на выходе. Например, для схемы рис.3.1 возможны эквивалентные схемы, представленные на рис.3.2.
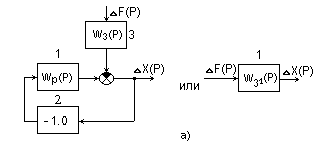

Рис 3.2. Варианты структурных схем, эквивалентных схеме рис.3.1
а - при входном воздействии DF(Р); б - при входном воздействии DZ(Р).
При этом следует иметь в виду, что для САУ, процессы в которых описываются линейными или линеаризованными (в отклонениях) дифференциальными уравнениями, справедлив принцип суперпозиции (наложения).
Поэтому при нахождении эквивалентной передаточной функции по какому-либо воздействию остальные воздействия могут считаться равными нулю.
Например, на рис.3.2,а принимается DZ(Р)=0, а на рис.3.2,б - DF(Р)=0. При этом в схеме рис.3.2,а звено с передаточной функцией - 1.0 отражает отрицательный знак главной обратной связи замкнутой САУ. Для структурных схем рис.3.2,а эквивалентные передаточные функции соответственно имеют вид:
DX(P) W3(P)
Wз1(Р) =---------------- = --------------------- =
DF(P) 1+Wp(P)
- 0.4 (0.8P3+(5.7+6.4KyKoc)P2+(8.7+0.8 KyKoc)P+1)
= ------------------------------------------------------------------------ ;(3.1)
0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1+0.48Ку
DX(P) Wp(P)
Wз2(Р) =--------------- = --------------------- =
DZ(P) 1+Wp(P)
0.48Ку
= ----------------------------------------------------------------------- ,(3.2)
0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1+0.48Ку
Где DX(P) W1(P) W2(P) W5(P) W4(P)
Wр(Р) =-------------- = ------------------------------------------------------------ =
DZ(P) 1 + W2(P) W5(P) W6(P)
0.48Ку
= ---------------------------------------------------------------------------------- =
(8 P +1)[(0.5P+1)(0.2P+1)+0.8 KyKocР]
0.48Ку
= ------------------------------------------------------------------------- . (3.3)
0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1
В выражении передаточной функции целесообразно выделить в явном виде характеристический оператор Д(Р) и операторный коэффициент Кр для передаточных функций (3.1), (3.2) и (3.3)
Дз(Р) = 0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1+0.48Ку; (3.4)
Др(Р) = 0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1; (3.5)
Кз1(Р) = - 0.4 (0.8 P 3+(5.7+6.4 KyKoc)P2+(8.7+0.8 KyKoc)P+1);
Кз2(Р)= Кр(Р) = 0.48Ку;
Похожие работы
... Вид характеристики зависит от свойств самого регулятора, характеристик ИО и ОР. Вопросы устойчивости, характеризующейся динамическими свойствами АСР, являются основными при изучении теории и эксплуатации средств автоматического регулирования. Определение температуры является одним из сложных и трудоемких процессов измерения, основанным на теплообмене между телами. Приборы, входящие в тепловой ...



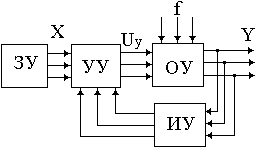
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
0 комментариев