Навигация
4. Оценка точности САУ
Если передаточную функцию по ошибке
![]()
представить в виде степенного ряда
![]() ,
,
то коэффициенты ![]() ,
, ![]() ,
, ![]() , … называют коэффициентами ошибок. Их можно определить по известным формулам
, … называют коэффициентами ошибок. Их можно определить по известным формулам

Затем величину ошибки можно рассчитать по формуле
![]()
В задании требуется определить ошибку при xВХ(t) = 1; t; t2 .
Программа расчёта величины ошибки:
disp (' *** Определение коэффициентов ошибок ***');
syms p Wd x dx t % p, Wd, x, dx - символьные переменные
a(2)=252.5*1.0e+8;
disp (' Передаточная функция по ошибке ');
Wd=(a(7)*p^6+a(6)*p^5+a(5)*p^4+a(4)*p^3+a(3)*p^2+a(2)*p+a(1))/(a(7)*p^6+a(6)*p^5+a(5)*p^4+
+a(4)*p^3+a(3)*p^2+(a(2)+0.075*1.0e+8)*p+a(1));
pretty(Wd) % вывод в удобочитаемом виде
disp (' Коэффициенты ошибок ');
S0=subs(diff(Wd,p,0),p,0)
S1=subs(diff(Wd,p,1),p,0)
S2=subs(diff(Wd,p,2),p,0)
S3=subs(diff(Wd,p,3),p,0)
S4=subs(diff(Wd,p,4),p,0)
S5=subs(diff(Wd,p,5),p,0)
S6=subs(diff(Wd,p,6),p,0)
disp (' ');
disp ('Определение ошибки при различных функциях входного сигнала');
x=1
dx=eval(S0*x+S1*diff(x,t)+S2*diff(x,t,2)+S3*diff(x,t,3)+S4*diff(x,t,4)+S5*diff(x,t,5)+S6*diff(x,t,6))
%pretty(dx)
x=t
dx=eval(S0*x+S1*diff(x,t)+S2*diff(x,t,2)+S3*diff(x,t,3)+S4*diff(x,t,4)+S5*diff(x,t,5)+S6*diff(x,t,6));
pretty(dx)
x=t^2
dx=eval(S0*x+S1*diff(x,t)+S2*diff(x,t,2)+S3*diff(x,t,3)+S4*diff(x,t,4)+S5*diff(x,t,5)+S6*diff(x,t,6));
pretty(dx)
Результат работы программы:
*** Определение коэффициентов ошибок ***
Передаточная функция по ошибке
6 5 4 3 2
(75 p + 75030 p + 75030753 p + 2530753150 p + 1753150000 p
/ 6 5 4
+ 25250000000 p + 5000000000) / (75 p + 75030 p + 75030753 p
/
3 2
+ 2530753150 p + 1753150000 p + 25257500000 p + 5000000000)
Коэффициенты ошибок
S0 = 1
S1 = -0.0015
S2 = 0.0152
S3 = -0.2265
S4 = 4.5312
S5 = -113.3155
S6 = 3.4005e+003
Определение ошибки при различных функциях входного сигнала
x = 1
dx = 1
x = t
211106232533
t - ----------------------
140737488355328
x = t^2
2 211106232533 34124900276475
t - --------------------- t + ------------------------
70368744177664 1125899906842624
При ![]()
![]() (система статическая).
(система статическая).
При ![]()
![]() (скоростная ошибка линейно возрастает с течением времени).
(скоростная ошибка линейно возрастает с течением времени).
При ![]()
![]() (ошибка от ускорения с течением времени изменяется по квадратичному закону).
(ошибка от ускорения с течением времени изменяется по квадратичному закону).
5. Показатели качества переходного процесса
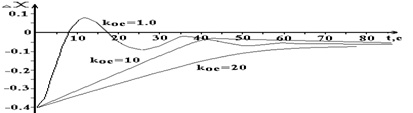
Для определения показателей качества переходного процесса проанализируем переходную характеристику на рис.10.
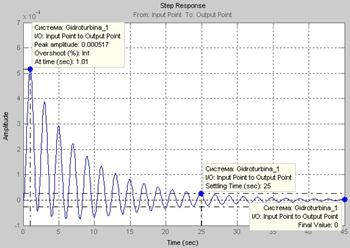
Рис.10. Переходная характеристика САУ
Будем определять следующие показатели качества переходного процесса: время регулирования переходного процесса ![]() , недорегулирование
, недорегулирование ![]() , колебательность переходного процесса
, колебательность переходного процесса ![]() .
.
Время регулирования переходного процесса ![]() характеризует быстродействие системы и определяется как интервал времени от начала переходного процесса до момента, когда отклонение выходной величины
характеризует быстродействие системы и определяется как интервал времени от начала переходного процесса до момента, когда отклонение выходной величины ![]() от её установившегося значения
от её установившегося значения ![]() становится меньше определённой достаточно малой величины (5%
становится меньше определённой достаточно малой величины (5%![]() ).
).
Время регулирования переходного процесса ![]() .
.
Колебательность переходного процесса ![]() обычно определяется числом колебаний равным числу максимумов (минимумов) переходной характеристики за время регулирования
обычно определяется числом колебаний равным числу максимумов (минимумов) переходной характеристики за время регулирования ![]() .
.
Колебательность переходного процесса ![]() .
.
Недорегулирование ![]() характеризует перегрузку в системе, это максимальное отклонение переходной характеристики относительно
характеризует перегрузку в системе, это максимальное отклонение переходной характеристики относительно ![]() , выраженное в %-ах от него. Для большинства систем
, выраженное в %-ах от него. Для большинства систем ![]() обычно не превышает 30%. Недорегулирование вычисляется по формуле:
обычно не превышает 30%. Недорегулирование вычисляется по формуле:
![]() ,
,
где ![]() - максимальное значение, достигаемое переходной характеристикой.
- максимальное значение, достигаемое переходной характеристикой.
![]() .
.
![]() .
.
6. Коррекция динамических свойств системы
Простейшим способом повышения качества САУ является подбор значений параметров её элементов.
Новые значения параметров звеньев:
![]() ;
; ![]() .
.
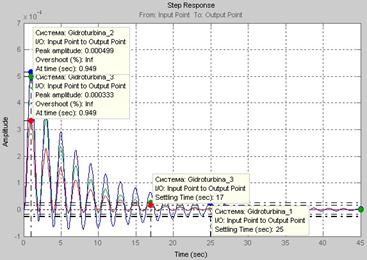
Рис.11. Графики переходной характеристики САУ до и после корректирования
Время регулирования переходного процесса ![]() .
.
Колебательность переходного процесса ![]() .
.
Максимальное значение![]() .
.
Запас устойчивости системы увеличился (рис.12).
![]() .
.
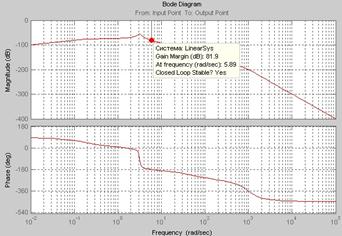
Рис.12. ЛЧХ разомкнутой САУ
Список литературы
1. Черных И.В. "Simulink: Инструмент моделирования динамических систем" (simulink.chm)
2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. Ситников Д.В. Омск: ОмГТУ, 2003.
Похожие работы



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
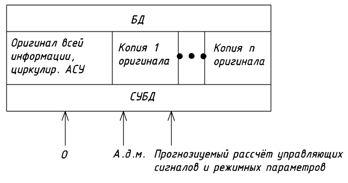
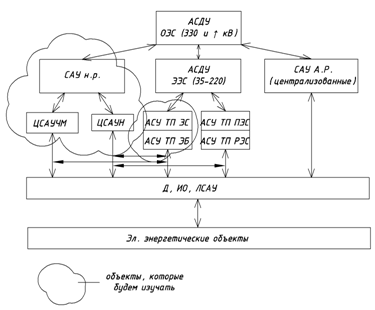
... ЛСАУ. ЦСАУЧМ – централизованная САУ частотой и мощностью; ЦСАУН -- централизованная САУ напряжением (управл. U и Q) В состав автоматизированного технологического управления эл. эн. системы кроме автоматизированных систем управления входят и автоматические системы управления. Есть 2 группы таких систем: САУ нормальным и САУ аварийным режимами (Н.Р. и А.Р,). Устойчивость параллельной работы ...
... приведены краткие выводы о свойствах исследуемой системы, числовые значения показателей качества управления, их оценка и, по возможности, рекомендации по их улучшению. ЛИТЕРАТУРА 1. Коротков В.Ф. Основы линейной теории автоматического управления в задачах электроэнергетики: Учебное пособие с компьютерным лабораторным практикумом АОС - ТАУ / Иван. Гос. Энерг. ун-т. - Иваново, 1994. - 392 с. ...
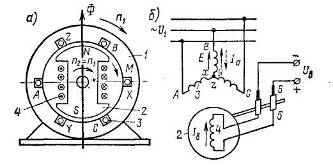
... особенностью машины постоянного тока является наличие коллектора и скользящего контакта между обмоткой якоря и внешней электрической цепью. 2.2 Устройство машины постоянного тока Машина постоянного тока (рис. 2.3) по конструктивному исполнению подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения – на статоре. Основное отличие заключается ...
0 комментариев