Навигация
Основы теоремы двойственности
27038
знаков
6
таблиц
6
изображений
1.2 Основы теоремы двойственности
1.2.1. Несимметричные двойственные задачи
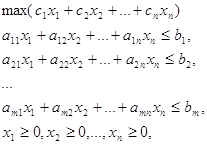
Теорема двойственности:Система ограничений исходной задачи в несимметричных двойственных задачах определяется как равенство. Двойственная же задача задается, как неравенство, причем переменные могут быть и отрицательными. Что бы проще понимать постановку задачи будем интерпретировать ее в матричной форме.
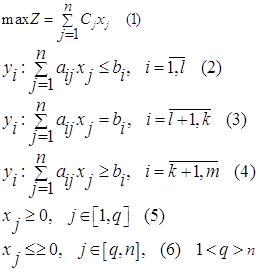
Сформулируем двойственную задачу. Необходимо определить матрицу-строку Y=(y1, y2,…, ym), которая максимизирует линейную функцию f=YA0и удовлетворяет ограничениям
YA>С (1.1)
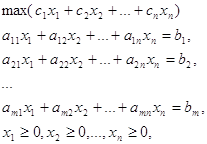
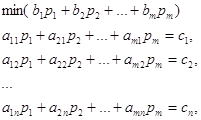
Сформулируем исходную задачу. Определить матрицу-столбец X=(x1, x2,…, xn), которая минимизирует линейную функцию Z=СХ и. удовлетворяет ограничениям
AX=A0,Х>0 (1.2)
Как в исходной так и в двойственной задачах А=(aij) – матрица коэффициентов системы ограничений, A0=(b1, b2,…, bm) – матрица-столбец, C=(c1, c2,…, cn) – матрица-строка. Теорема двойственности устанавливает связь между оптимальными планами пары двойственных задач.
Теорема двойственности гласит: если из пары двойственных задач одна обладает оптимальным планом, то и другая имеет решение, причем для экстремальных значений линейных функций выполняется соотношение minZ =maxf. Если линейная функция одной из задач не ограничена, то другая не имеет решения
Доказательство.
Будем считать, что исходная задача имеет оптимальный план. План определен симплексным методом. Можно считать, что конечный базис состоит из т первых векторов A1, A2,…, Am.
Будем считать, что D является матрицей, составленной из компонент векторов конечного базиса A1, A2., Am Приведенная выше таблица состоит из коэффициентов разложения векторов A1, A2,…, Anисходной системы по векторам базиса. В этой таблице каждому вектору A jсоответствует вектор Xj.
Используя соотношения (1.3) и (1.4), получаем:
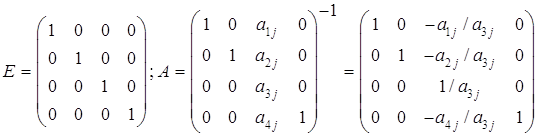
(1.5) A=D, D-1A=
(1.6) A0 =DX*; D-1A0 =X
(1.7) min Z= C*X*,
(1.8) = C* – C > 0,
где С=(C1, C2,…, Cm), С=(C1, C2,…, Cm, Cm +1,…, Cn), a=(CX1–C1; СХ2 – С2,…, CXn–Cn)=(Z1–С; Z2-C2;…, Zn–Cn) – вектор, компоненты которого неположительны, так как они совпадают с Zj–Cj>0, соответствующими оптимальному плану.
Оптимальный план исходной задачи имеет вид X=D-1А0, поэтому оптимальный план двойственной задачи ищем в виде
(1.9) Y = C*D-1
Покажем, что Y* действительно план двойственной задачи. Для этого ограничения (1.2) запишем в виде неравенства YA-С>0, в левую часть которого подставим Y*. Тогда на основании (1.9), (1.5) и (1.8) получим
YА–С=С*D-1А–С=С-С>0, откуда находим Y*A>С
Так как Y* удовлетворяет ограничениям (1.2), то это и есть план двойственной задачи. При этом плане значение линейной функции двойственной задачи f(Y)=Y*A0.Учитывая соотношения (1.9), (1.6) и (1.7), имеем
(1.10) f (Y) = Y*A0=C * D-1A0= C*X = minZ(X)
Таким образом, значение линейной функции двойственной задачи от Y численно равно минимальному значению линейной функции исходной задачи
Докажем теперь, что Y* является оптимальным планом. Умножим (1.1) на любой план Y двойственной задачи, а (1.2) – на любой план X исходной задачи: YAX=YA0=f(Y), YAX>СХ=Z(X), отсюда следует, что для любых планов Х и Y выполняется неравенство
(1.11) f(Y)>Z(X)
Этим же соотношением связаны и экстремальные значения maxf(Y)>minZ(Х). Из последнего неравенства заключаем, что максимальное значение линейной функции достигается только в случае, если maxf(Y)=minZ(X), но это значение f(Y) достигает при плане Y, следовательно, план Y – оптимальный план двойственной задачи.
Аналогично можно доказать, что если двойственная задача имеет решение, то исходная также обладает решением и имеет место соотношение maxf(Y)=minZ(X)
Для доказательства второй части теоремы допустим, что линейная функция исходной задачи не ограничена снизу. Тогда из (1.11) следует, что f(Y) – Y. Это выражение лишено смысла, следовательно, двойственная задача не имеет решений.
Аналогично предположим, что линейная функция двойственной задачи не ограничена сверху. Тогда из (1.11) получаем, что Z(X)+Y. Это выражение также лишено смысла, поэтому исходная задача не имеет решений.
Доказанная теорема позволяет при решении одной из двойственных задач находить оптимальный план другой. Здесь матрица-строка С = (0; 1; 0; –1; – 3, 0), матрица-столбец
1 1 2 0 -1 1 0
A 0 = 2 A = 0 -4 1 2 -1 0
3 0 3 0 0 1 1
1 0 0
2 -4 3
A «’ = 0 1 0
-1 2 0
1 -1 0
0 0 1
Двойственная задача. Найти максимальное значение линейной функции f=y1+2y2+5y3 при ограничениях
y1> 0
2y1 – 4y2 + 3y3 > 1,
y2 > 0,
(-y1)+ 2y2 >(-1),
y1 – y2 + y3 = -3, y3 > 0
Оптимальный план исходной задачи X = (0; 1/3; 0; 11/3; 4; 0), при котором получим Zmin= -46/3. Используя эту итерацию, найдем оптимальный план двойственной задачи. Согласно теореме двойственности оптимальный план двойственной задачи находится из соотношения Y= C*D-1, где матрица D-1- матрица, обратная матрице, составленной из компонент векторов, входящих в последний базис, при котором получен оптимальный план исходной задачи. В последний базис входят векторы A5, A4, A2; значит,
1 -1 2
D = (A 5, A 4, A 2) = -1 2 -4
1 0 3
Обратная матрица D -1образована из коэффициентов, стоящих в столбцах A1, A3, A6четвертой итерации:
2 1 0
D -1 = -1/3 1/3 2/3
-2/3 -1/3 1/3
Из этой же итерации следует С = (–3; –1; 1). Таким образом
2 1 0
Y=С*D-1 =(-3; – 1; 1) -1/3 1/3 2/3
-2/3 1/3 1/3
Y=(-19/3; – 11/3; – 1/3),
т.е. yi =С*Хi, где Хi– коэффициенты разложения последней итерации, стоящие в столбцах векторов первоначального единичного базиса.
Итак, i-ю двойственную переменную можно получить из значения оценки (m+1) – й строки, стоящей против соответствующего вектора, входившего в первоначальный единичный базис, если к ней прибавить соответствующее значение коэффициента линейной функции:
у1 =–19/3+0=–19/3; y2 =-11/3+0=-11/3; у3 =-1/3+0=-1/3
При этом плане maxf=-46/3
1.2.2 Симметричные двойственные задачи
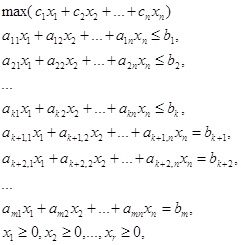
Разновидностью двойственных задач линейного, программирования являются двойственные симметричные задачи, в которых система ограничений как исходной, так и двойственной задач задается неравенствами, причем на двойственные переменные налагается условие неотрицательности.
Исходная задача. Найти матрицу-столбец Х=(x1, x2,…, xn), которая удовлетворяет системе ограничений
(1.12). АХ>А0, Х>0 и минимизирует линейную функцию Z=СХ
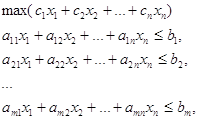
Систему неравенств с помощью дополнительных переменных можно преобразовать в систему уравнений, поэтому всякую пару симметричных двойственных задач можно преобразовать в пару несимметричных, для которых теорема двойственности уже доказана.
Используя симметричность, можно выбрать задачу, более удобную для решения. Объем задачи, решаемой с помощью ЭВМ, ограничен числом включаемых строк, поэтому задача, довольно громоздкая в исходной постановке, может быть упрощена в двойственной формулировке. При вычислениях без помощи машин использование двойственности упрощает вычисления.
Очевидно, для того чтобы записать двойственную задачу, сначала необходимо систему ограничений исходной задачи привести к виду. Для этого второе неравенство следует умножить на -1.
Похожие работы
... , доставляющий наибольшее значение целевой функции по сравнению с любым другим допустимым вектором , т.е. , называется решением задачи, или оптимальным планом. Максимальное значение целевой функции называется значением задачи. Двойственная задача линейного программирования. Рассмотрим задачу ЛП (1) или, в матричной записи, (2) Задачей, двойственной к (1) (двойственной задачей), называется ...
... . При этом значения cij соответствуют коэффициентам целевой функции исходной замкнутой транспортной задачи (1) и в последующем не изменяются. Элементы xij соответствуют значениям переменных промежуточных решений транспортной задачи линейного программирования и изменяются на каждой итерации алгоритма. Если в некоторой ячейке xij=0, то такая ячейка называется свободной, если же xij>0, то такая ...
... . 1.3. Построение ограничений и градиента целевой функции : 1.4. Область допустимых решений – отрезок AB. 1.5. Точка А – оптимальная. Координаты т. А: ; ; . 2. Решение задачи линейного программирования симплекс-методом. Прямая задача. Задачу линейного программирования для любой вершины в компактной форме можно представить в виде: Для получения используем алгоритм, приведённый в ...
... положит в такой симплекс-таблице текущие базисные переменные равными Ai,0, а свободные - нулю, то будет получено оптимальное решение. Практика применения симплекс метода показала, что число итераций, требуемых для решения задачи линейного программирования обычно колеблется от 2m до 3m, хотя для некоторых специально построенных задач вычисления по правилам симплекс метода превращаются в прямой ...
0 комментариев