Навигация
Динамика плоских шарнирных механизмов
21665
знаков
9
таблиц
33
изображения
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Кафедра теоретической механики
Курсовая работа
по курсу «Динамика» на тему
«Динамика плоских шарнирных механизмов»
Кафедра теоретической механики
Рецензия на курсовую работу
студента__________________________________
группы №_________________________________
вариант №_________________________________
количество страниц_________________________
курсовая работа по содержанию
соответствует / не соответствует
выданному заданию и выполнена
в полном / не в полном
обьёме. КР может быть допущена к защите с
добавлением____________баллов рецензента
после успешной защиты.
Рецензент_______/_______________________
«_______»_________________________2007 г.
Тула, 2007 г.
Аннотация
В данной работе изучается динамическое поведение многозвенного плоского шарнирного механизма. Совместно решается нелинейная система, в которую входят: нелинейное дифференциальное уравнение движения механизма, система нелинейных уравнений геометрических связей и система линейных алгебраических уравнений кинематических связей. Исследуются факторы, влияющие на неравномерность вращения ведущего звена. Все вычисления и построения графиков осуществляется в математическом пакете Mathcad
Содержание
Введение
1. Исходные данные и схема механизма
2. Составление дифференциального движения механизма
2.1 Составление кинематических соотношений
2.2 Составление дифференциального уравнения движения механизма с помощью теоремы об изменении кинетической энергии системы
3. Нахождение реакций внешних и внутренних связей
4. Результаты расчётов
4.1 Алгоритм вычислений
4.2 Динамический расчёт плоского шарнирного механизма
5. Анализ результатов вычислений
6. Результаты анализа
7. Выводы
8. Список использованной литературы
Введение
Плоские шарнирные механизмы широко распространены в современном машиностроении в связи с присущими им достоинствами: высокой технологичностью изготовления, возможностью выполнения шарнирных соединений на подшипниках качения, небольшим износом соприкасающихся поверхностей, долговечностью, надежностью в работе и ремонтоспособностью.
Без глубокого знания кинематических и динамических характеристик механизмов, входящих в современный агрегат, невозможно спроектировать машину с параметрами, близкими к оптимальным, что, безусловно, отражается на производительности, надежности, долговечности машины, и на качестве выпускаемой продукции. Знание кинематических и динамических свойств и возможностей механизмов необходимо для разработки новых технологических процессов.
Целью курсовой работы является исследование и анализ динамического поведения плоского шарнирного механизма с помощью основных теорем и принципов теоретической механики.
1. Исходные данные и схема механизма
Плоский шарнирный механизм (рис. 1), расположенный в вертикальной плоскости, движется под действием внешнего момента![]() , приложенного к ведущему звену (кривошипу ОА) и изменяющемуся по закону
, приложенного к ведущему звену (кривошипу ОА) и изменяющемуся по закону![]() . На звено О1D действует полезная нагрузка MH, величина которой задается соотношением
. На звено О1D действует полезная нагрузка MH, величина которой задается соотношением
![]()
Звенья механизма моделируются сплошными однородными стержнями, массы которых пропорциональны их длине. Погонная плотность каждого стержня равна ρ. Соединение стержней осуществлено идеальными шарнирами. Движение механизма начинается из состояния покоя, а начальное значение угла поворота ведущего звена равно φ = 0.
Требуется
- Составить дифференциальное уравнение движения механизма с помощью
теоремы об изменении кинетической энергии.
- Определить динамические реакции внешних и внутренних связей.
- Провести численное интегрирование дифференциального уравнения движения при заданных начальных условиях с помощью пакета Mathcad.
- Провести анализ результатов вычислений.
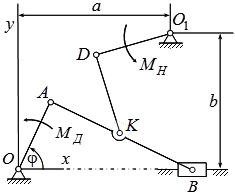
Рис. 1 Схема механизма
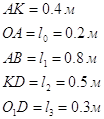
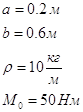
Дано:

Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... 5 -7м ), что связано с увеличением площади устоев. 2.3. Определение мощности и выбор электродвигателя для электро- механического привода двустворчатых ворот судоходного шлюза. Электроприводы основных механизмов судоходных гидротехнических сооружений являются ответственными элементами электрооборудования шлюзов. Несоответствие выбранного привода технологическому режиму, неполный счет факторов, ...
... , прохождение шаблона до необходимой глубины. Переход на другие горизонты и приобщение пластов. Уменьшение потерь нефти. Ремонты скважин, оборудованных пакерами. Герметичность пакера, увеличение дебета нефти. Увеличение, сокращение объемов закачки воды. Зарезка и бурение второго ствола. Выполнение запланированного объема работ. Ремонт нагнетательных скважин. Герметичность колонны и ...
... -автомат с тепловым реле шт. 3 50,00 150,00 итого: 1450,00 Суммарные затраты 1769,58 При эксплуатации установки потребляется 5 кВтЧч электроэнергии, что составит 98 рублей. Установка для статической балансировки является исключительно лабораторным стендом и использоваться в качестве промышленной установки не может. Норма расходов на содержание ...
0 комментариев