Навигация
Составление дифференциального уравнения движения механизма
21665
знаков
9
таблиц
33
изображения
2. Составление дифференциального уравнения движения механизма
Для решения поставленной задачи выберем правую систему координат, начало которой расположим в подшипнике О. Рассмотрим механизм в произвольном положении и изобразим силы, действующие на него в данный момент времени (рис.2): ![]() - силы тяжести звеньев; MH- полезная нагрузка; МД - возмущающий момент;
- силы тяжести звеньев; MH- полезная нагрузка; МД - возмущающий момент; ![]() - реакции опор.
- реакции опор.
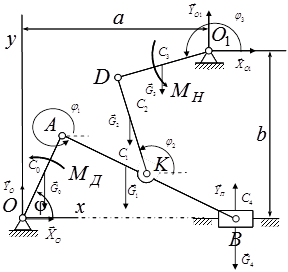
Рис.2 Расчётная схема механизма.
2.1 Составление кинематических соотношений
Рассматриваемый механизм представляет собой механическую систему с одной степенью свободы. Положение всех его звеньев будем определять с помощью угла поворота ведущего звена φ. Углы поворотов звеньев φk (k=1,2,3), отсчитываются от горизонтальной оси Ох в положительном направлении.
Выразим кинематические характеристики всех тел механизма через кинематические параметры ведущего звена с помощью уравнений геометрических связей (подробное описание этой процедуры можно получить в КР по кинематике 21 вариант за 2006 г.)
 (1)
(1)
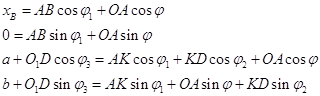
Угловые координаты звеньев механизма и координата ползуна B будут определяться соотношениями
![]()
![]() (2)
(2)
![]()
![]()
где - ![]()
![]()
![]()
![]()
Угловые скорости звеньев можно получить из соотношения
![]() (3)
(3)
где ![]() вектор угловых скоростей звеньев, отнесённых к угловой скорости ведущего звена
вектор угловых скоростей звеньев, отнесённых к угловой скорости ведущего звена ![]()
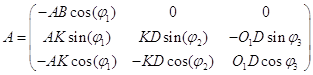 - матрица коэффициентов системы уравнений
- матрица коэффициентов системы уравнений
![]()
![]() - вектор правых частей системы уравнений
- вектор правых частей системы уравнений ![]()
Скорости центров масс кривошипов ОА и О1D найдём по формуле Эйлера
![]()
![]() (4)
(4)
а скорости центров масс шатунов АB и KD вычислим с помощью теоремы о сложении скоростей плоской фигуры.
![]()
![]() (5)
(5)
где ![]() - скорость точки А кривошипа ОА,
- скорость точки А кривошипа ОА, ![]() - скорость точки K шатуна AB.
- скорость точки K шатуна AB.
Скорость ползуна B определим дифференцированием четвёртого уравнения системы (2)
![]() (6)
(6)
Угловые ускорения механизма связаны между собой аналогичными с (3) выражениями
![]() (7)
(7)
![]() - вектор неизвестных угловых ускорений звеньев.
- вектор неизвестных угловых ускорений звеньев.
![]() - вектор правых частей системы уравнений
- вектор правых частей системы уравнений ![]()
 (8)
(8)
При вычислении угловых ускорений учтено, что ускорение ведущего звена не равно нулю.
Ускорения центров масс кривошипов ОА и О1D найдём по формуле Эйлера
![]()
![]() (9)
(9)
а ускорения центров масс шатунов АB и KD вычислим с помощью теоремы о сложении ускорений плоской фигуры.
![]()
![]() (10)
(10)
где ![]() - ускорение точки А кривошипа ОА,
- ускорение точки А кривошипа ОА, ![]() - ускорение точки K шатуна АB.
- ускорение точки K шатуна АB.
Ускорение ползуна B определим дифференцированием уравнения (6)
![]() (11)
(11)
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... 5 -7м ), что связано с увеличением площади устоев. 2.3. Определение мощности и выбор электродвигателя для электро- механического привода двустворчатых ворот судоходного шлюза. Электроприводы основных механизмов судоходных гидротехнических сооружений являются ответственными элементами электрооборудования шлюзов. Несоответствие выбранного привода технологическому режиму, неполный счет факторов, ...
... , прохождение шаблона до необходимой глубины. Переход на другие горизонты и приобщение пластов. Уменьшение потерь нефти. Ремонты скважин, оборудованных пакерами. Герметичность пакера, увеличение дебета нефти. Увеличение, сокращение объемов закачки воды. Зарезка и бурение второго ствола. Выполнение запланированного объема работ. Ремонт нагнетательных скважин. Герметичность колонны и ...
... -автомат с тепловым реле шт. 3 50,00 150,00 итого: 1450,00 Суммарные затраты 1769,58 При эксплуатации установки потребляется 5 кВтЧч электроэнергии, что составит 98 рублей. Установка для статической балансировки является исключительно лабораторным стендом и использоваться в качестве промышленной установки не может. Норма расходов на содержание ...
0 комментариев