Навигация
Анализ результатов вычислений
21665
знаков
9
таблиц
33
изображения
5. Анализ результатов вычислений
Анализ результатов вычислений позволяет сделать следующие выводы
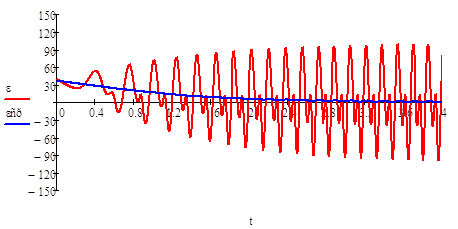
1. Время неустановившегося движения механизма невелико и составляет
около 1.3 с.
2. В установившемся режиме движение кривошипа близко к равномерному вращению, средняя угловая скорость которого порядка ![]()
Максимальные и минимальные значения угловой скорости в установившемся режиме приблизительно равны ![]() и
и ![]() , а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен
, а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен

3. В установившемся режиме среднее угловое ускорение маховика приблизительно равно ![]() . Амплитуда изменения углового ускорения значительна и составляет около
. Амплитуда изменения углового ускорения значительна и составляет около ![]() , а коэффициент динамичности в этом случае
, а коэффициент динамичности в этом случае
4. При заданных геометрических и инерционных параметрах механизма градиенты углового ускорения ведущего звена, а также реакций внешних и внутренних связей в сочленениях звеньев механизма имеют большие значения. Это может привести к разрывам механизма в местах сочленений и нарушению его работоспособности.
На основании выводов по результатам расчета движения механизма сформулируем задачу исследования.
Выявить факторы, влияющие на неравномерность движения механизма и найти такие решения, при которых неравномерность установившегося движения исчезает или становится незначительной.
Анализ дифференциального уравнения движения механизма (17) показывает, что основными факторами, влияющими на неравномерность движения, являются:
- величина приведенного момента инерции ![]() (чем больше
(чем больше![]() , тем меньше амплитуда угловых ускорений);
, тем меньше амплитуда угловых ускорений);
- характер изменения производной ![]() (чем меньше амплитуда и чем больше период ее изменения, тем меньше градиенты углового ускорения);
(чем меньше амплитуда и чем больше период ее изменения, тем меньше градиенты углового ускорения);
Таким образом, для уменьшения неравномерности движения необходимо
обеспечить:
![]()
- где ![]() ,
,![]() - центр масс всего механизма
- центр масс всего механизма
что может быть получено за счет увеличения приведенного момента инерции механизма и уменьшения амплитуды его изменения.
Это достигается постановкой на ведущее звено массивного маховика и (или) облегчением остальных звеньев механизма.
6. Результаты анализа
С целью подтверждения проведенных исследований произведем расчет конструктивно измененного механизма. Заменим ведущий кривошип (однородный стержень) массивным маховиком с массой распределённой по ободу и уменьшим массы остальных частей механизма, выбрав материал с меньшей погонной плотностью.
Ввод исходных данных и вычисление постоянных величин
![]()
![]()
![]()
| Определение положения узловых точек механизма радиус-векторами |
Вычисление моментов инерции кривошипов относительно оси вращения, шатунов - относительно осей, проходящих через центр масс
![]()
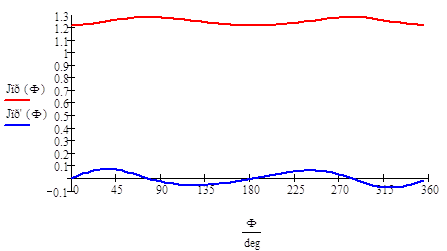
Отображение приведённого момента инерции и его производной на графике за один оборот кривошипа
![]()
|
|
Процедура интегрирования дифференциальных уравнений
Конечный момент времени
![]()
Вывод результатов вычислений
Вычисление средней угловой скорости
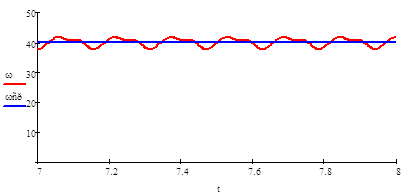
График изменения угловой скорости ω=ω(t) и величины ωср в интервале
![]()
![]()

График изменения угловой скорости ω=ω(t) и величины ωср в интервале ![]()
Вычисление среднего углового ускорения εср
График углового ускорения ε и εср
![]()
![]()
![]()
![]()
Вычисление MД и его среднего значения
![]()
![]()
График Мд и Мдср
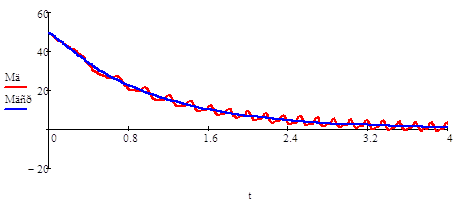
График Мд и Мдср

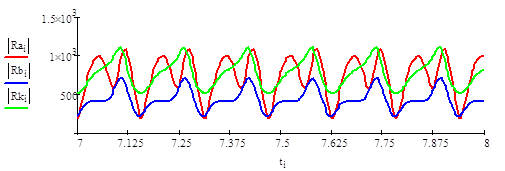
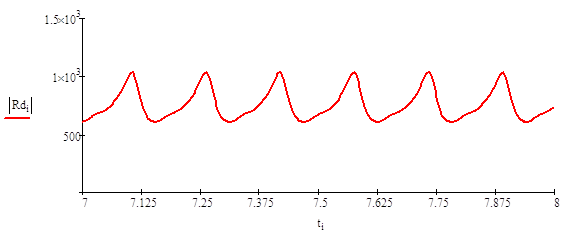
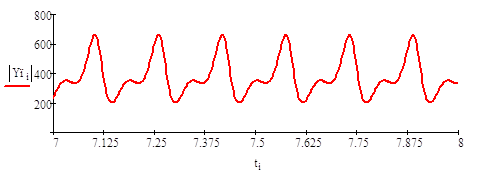
Графики реакций внешних и внутренних связей
|
|

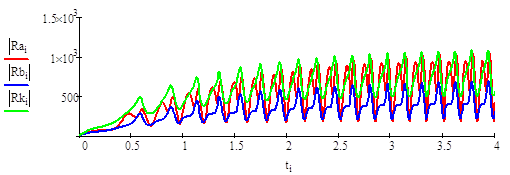


Графики реакций внешних и внутренних связей
|
|
В результате:
- Время неустановившегося движения механизма составляет около 5.5 с;
- В установившемся режиме движения средняя угловая скорость маховика составляет ![]() . Максимальные и минимальные значения угловой скорости в установившемся режиме равны
. Максимальные и минимальные значения угловой скорости в установившемся режиме равны ![]() и
и ![]()
- Коэффициент неравномерности движения механизма становится равным
- Коэффициент динамичности в этом случае
Такое уменьшение, по сравнению с первоначальным случаем, коэффициентов неравномерности (![]() в 9.5 раз) и динамичности (
в 9.5 раз) и динамичности (![]() в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз.
в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз.
7. Выводы
В результате решения полученного дифференциального уравнения движения механизма были определены: закон движения ведущего звена ОА, его угловые скорость и ускорение как функции времени t. На основании найденного закона движения по разработанному алгоритму были вычислены значения реакций внешних и внутренних связей.
Проведенный анализ результатов расчета показал, что
1. Время неустановившегося движения механизма невелико и составляет около 1.3 с.
2. В установившемся режиме движение кривошипа близко к равномерному вращению, средняя угловая скорость которого порядка ![]()
Максимальные и минимальные значения угловой скорости в установившемся режиме приблизительно равны ![]() и
и ![]() , а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен
, а его период - 0.162 с. Таким образом, коэффициент неравномерности движения механизма приблизительно равен
3. В установившемся режиме среднее угловое ускорение маховика приблизительно равно ![]() . Амплитуда изменения углового ускорения значительна и составляет около
. Амплитуда изменения углового ускорения значительна и составляет около ![]() , а коэффициент динамичности в этом случае
, а коэффициент динамичности в этом случае
4. При заданных геометрических и инерционных параметрах механизма градиенты углового ускорения ведущего звена, а также реакций внешних и внутренних связей в сочленениях звеньев механизма имеют большие значения. Это может привести к разрывам механизма в местах сочленений и нарушению его работоспособности.
С целью устранения этой ситуации был сформулирован критерий, удовлетворение которого позволит уменьшить значение этих коэффициентов.
Проведенные исследования показали, что уменьшения масс звеньев механизма, с одновременным увеличением массы ведущего звена и замены кривошипа маховиком с массой распределенной по его ободу значительно снизили величины данных коэффициентов.
Таким образом, увеличение массы ведущего звена в 15 раз с одновременным уменьшением масс звеньев в 10 раз и уменьшением массы ползуна в 2 раза позволило добиться следующего:
- Время неустановившегося движения механизма составляет около 5.5 с;
- В установившемся режиме движения средняя угловая скорость маховика составляет ![]() . Максимальные и минимальные значения угловой скорости в установившемся режиме равны
. Максимальные и минимальные значения угловой скорости в установившемся режиме равны ![]() и
и ![]()
- Коэффициент неравномерности движения механизма становится равным
- Коэффициент динамичности в этом случае
Такое уменьшение, по сравнению с первоначальным случаем, коэффициентов неравномерности (![]() в 9.5 раз) и динамичности (
в 9.5 раз) и динамичности (![]() в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз.
в 16.2 раза) приводит к уменьшению максимальных значений модулей реакций внешних и внутренних связей приблизительно до 7.5 раз.
8. Список использованной литературы
1. Бертяев В.Д. Теоретическая механика на базе Mathcad практикум – СПб.: БХВ – Петербург, 2005;
2. Кирьянов Д.В. Самоучитель Mathcad 12. - СПб.: БХВ – Петербург, 2004.
3. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. Т.2 (Динамика) – М.: Наука, 1990.
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... 5 -7м ), что связано с увеличением площади устоев. 2.3. Определение мощности и выбор электродвигателя для электро- механического привода двустворчатых ворот судоходного шлюза. Электроприводы основных механизмов судоходных гидротехнических сооружений являются ответственными элементами электрооборудования шлюзов. Несоответствие выбранного привода технологическому режиму, неполный счет факторов, ...
... , прохождение шаблона до необходимой глубины. Переход на другие горизонты и приобщение пластов. Уменьшение потерь нефти. Ремонты скважин, оборудованных пакерами. Герметичность пакера, увеличение дебета нефти. Увеличение, сокращение объемов закачки воды. Зарезка и бурение второго ствола. Выполнение запланированного объема работ. Ремонт нагнетательных скважин. Герметичность колонны и ...
... -автомат с тепловым реле шт. 3 50,00 150,00 итого: 1450,00 Суммарные затраты 1769,58 При эксплуатации установки потребляется 5 кВтЧч электроэнергии, что составит 98 рублей. Установка для статической балансировки является исключительно лабораторным стендом и использоваться в качестве промышленной установки не может. Норма расходов на содержание ...
0 комментариев