Структура сервоприводу
Метод безпосередньої лінеаризації
Аналіз і синтез досліджуваної системи управління сервоприводу з урахуванням впливу нелінійних ділянок
Датчик зворотного зв'язку
Нелінійності сервоприводу
Отримання частотних характеристик
Оцінка реалізованої періоду дискретності
Розробка принципової схеми обчислювача
Дослідницька частина
Розрахунок сервоприводу з нелінійною ланкою
Комплексний план теми НДР
Виконавці і тривалість робіт
Розробка мережного графіка, побудова лінійної карти мережі, графіка розвантаження виконавців
Розрахунок ціни теми
Можливі надзвичайні ситуації в районі робочого місця або вузу
Навигация
Отримання частотних характеристик
Дослідження сервоприводу з урахуванням нелінійності
111400
знаков
14
таблиц
24
изображения
3.1 Отримання частотних характеристик
Суть експериментального методу отримання частотної характеристики будь-якої динамічної ланки полягає в дослідженні його реакції на дію гармонійного сигналу вигляду: ![]() . Для виконання експерименту необхідно виконати наступне:
. Для виконання експерименту необхідно виконати наступне:
а) встановити перемикач ![]() в положення 3, що відповідає підключенню виходу ГНЧ до входу СМ;
в положення 3, що відповідає підключенню виходу ГНЧ до входу СМ;
б) встановити перемикач ![]() в положення 1, що відповідає підключенню сигналу з виходу генератора до першого променя осцилографа, а перемикач
в положення 1, що відповідає підключенню сигналу з виходу генератора до першого променя осцилографа, а перемикач ![]() – в положення 4, що відповідає підключенню сигналу з виходу потенціометра зворотного зв'язку ЕГРМ до другого променя осцилографа;
– в положення 4, що відповідає підключенню сигналу з виходу потенціометра зворотного зв'язку ЕГРМ до другого променя осцилографа;
в) за допомогою будівельних ручок, що знаходяться не передній панелі ГНЧ, встановити частоту сигналу 0,02 Гц, а амплітуду сигналу підібрати так, щоб вона не потрапляла в зони не лінійності швидкісної характеристики ЕГРМ;
г) включити ГНЧ;
д) включити тумблер![]() , при цьому вихідний шток ЕГРМ повинен почати скоювати коливальні рухи певної амплітуди з частотою, рівній частоті вхідного сигналу. Оскільки до складу ЕГРМ входить інерційна ланка з великою постійною часу, то матиме місце фазовий зсув між вхідними і вихідними сигналами;
, при цьому вихідний шток ЕГРМ повинен почати скоювати коливальні рухи певної амплітуди з частотою, рівній частоті вхідного сигналу. Оскільки до складу ЕГРМ входить інерційна ланка з великою постійною часу, то матиме місце фазовий зсув між вхідними і вихідними сигналами;
е) по осцилографу визначити амплітуду вихідного сигналу, зсув фаз між сигналами і одержані результати занести в таблицю 3.4;
ж) змінити частоту вхідного сигналу на 0,02 Гц і повторити п. е.
Таблиця 3.4 Частотні характеристики ЕГРМ
|
| A |
|
| 0,126 | 0,5268 | 136,33 |
| 0,25 | 0,4587 | 65,66 |
| 0,5 | 0,32 | 29,38 |
| 1 | 0,1724 | 10,83 |
| 2,01 | 0,087 | 4,39 |
На малюнках 3.3 -3.4 представлені АЧХ і ФЧХ ЕГРМ
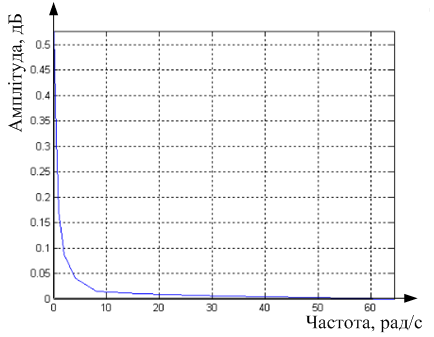
Малюнок 3.3 – АЧХ ЕГРМ
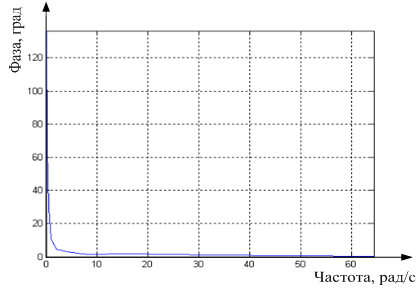
Малюнок 3.4 – ФЧХ ЕГРМ
4. Конструкторська частина
4.1 Проектування спеціалізованого обчислювача
В даній частині роботи буде проведений процес проектування спеціалізованого обчислювача.
В системі автоматичного позиціонування, що розробляється в даній роботі, регулятор буде виконаний на основі цифрового мікроконтролера, який повинен буде реалізовувати вибраний раніше закон управління. Для реалізації пропорційної і диференціальної складових потрібна інформація про положення керма управління. Пропонується функціональна схема, представлена на малюнку 4.1.

Малюнок 4.1 – Функціональна схема цифрового регулятора
ЗП – задаючий пристрій;
АК – аналоговий комутатор;
ПВХ – пристрій виборкихраніння;
АЦП – аналого-цифровий перетворювач;
МК – мікроконтролер;
ЦАП – цифро-аналоговий перетворювач;
ШІМ – широтно-імпульсний регулятор;
ШУ – шина управління.
4.2 Перетворювач алгоритмів управління для реалізації в спецобчислювачі
4.2.1 Аналіз алгоритмів управління
Вхідною інформацією для обчислювача є сигнали формувача задаючого сигналу і шифратора приросту. Обидва сигнали є 8-розрядним паралельним цифровим кодом.
Оскільки всі вхідні параметри алгоритму поступають безпосередньо з датчика і задаючого пристрою, то попередня обробка не потрібна. Принципи перевірки достовірності інформації з датчика не регламентуються і застосуються не будуть.
4.2.2 Розрахунок масштабуючих коефіцієнтів
Значення коду поступаючого з датчика, реєструючого переміщення, є 8-розрядним цифровим кодом, який характеризує величину лінійного переміщення керма управління. Згідно пункту 1, де була розроблена структурна схема системи позиціонування керма управління, значення сигналу зворотного зв'язку повинне бути зменшено в 1000 разів, відповідно виходячи з цього, цифровий 8-розрядний код поступаючий з шифратора приросту повинен бути помножений на коефіцієнт зворотного зв'язку:
![]() .
.
Дана операція буде виконана безпосередньо за допомогою мікроконтролера, при виконанні алгоритму реалізації заданих арифметичних операцій.
0 комментариев