Структура сервоприводу
Метод безпосередньої лінеаризації
Аналіз і синтез досліджуваної системи управління сервоприводу з урахуванням впливу нелінійних ділянок
Датчик зворотного зв'язку
Нелінійності сервоприводу
Отримання частотних характеристик
Оцінка реалізованої періоду дискретності
Розробка принципової схеми обчислювача
Дослідницька частина
Розрахунок сервоприводу з нелінійною ланкою
Комплексний план теми НДР
Виконавці і тривалість робіт
Розробка мережного графіка, побудова лінійної карти мережі, графіка розвантаження виконавців
Розрахунок ціни теми
Можливі надзвичайні ситуації в районі робочого місця або вузу
Навигация
Дослідницька частина
Дослідження сервоприводу з урахуванням нелінійності
111400
знаков
14
таблиц
24
изображения
5. Дослідницька частина
5.1 Вибір кругового коефіцієнту нелінійного сервоприводу
В нелінійних системах звичайно присутні автоколивання. Як основний критерій при виборі кругового коефіцієнта використовують вимоги відсутності автоколивань в нелінійній системі. Щоб досліджувати систему на автоколивання, треба її розімкнути так, щоб виділити нелінійність.
Всю розімкнену систему замінюємо двома ланками: лінійної і нелінійної частинами (мал. 5.2)

Малюнок 5.2 – Ланки: лінійна і нелінійна частина
Використовують метод гармонійної лінеаризації. Запишемо умову наявності автоколивань в системі: ![]() , звідси
, звідси  (умова наявності автоколивань в системі).
(умова наявності автоколивань в системі).
Перейдемо до умови відсутності автоколивань. Ця умова запишеться ![]() , отже
, отже  – умова відсутності автоколивань. Це означає, що годограф WЛ(s) і годограф
– умова відсутності автоколивань. Це означає, що годограф WЛ(s) і годограф ![]() не перетинаються, тоді, автоколивання в системі відсутні. Вигляд
не перетинаються, тоді, автоколивання в системі відсутні. Вигляд ![]() різний, залежно від того, яка нелінійність переважає. Якщо немає петлі, то нелінійність однозначна (мал. 5.3).
різний, залежно від того, яка нелінійність переважає. Якщо немає петлі, то нелінійність однозначна (мал. 5.3).
Малюнок 5.3 – Годограф без петлі
Те мінімальне значення кругового коефіцієнта посилення сервоприводу, при якому виконується умова існування автоколивань в системі, назвемо критичним.
Чому мінімальне?
Перетин годографів може бути найрізноманітнішим. Завжди в системі буде два граничні цикли. Один стійкий, інший нестійкий. Але коефіцієнт не буде критичним.
Найменший коефіцієнт, який виходить тільки при торканні і буде мінімальним і критичним. Оскільки, якщо його зменшити, то будуть відсутні автоколивання.
Розглянемо деякий окремий випадок.
Розмикаємо систему на вході нелінійної ланки (мал. 5.4)
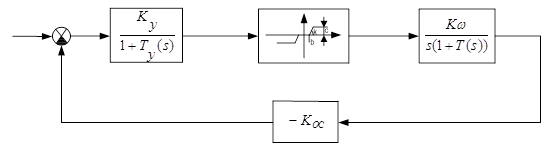
Малюнок 5.4 – Розімкнена система на вході нелінійної ланки
де ![]() .
.
Передавальна функція лінійної частини системи:
![]() (5.1)
(5.1)
передавальна функція нелінійної частини системи WН – це коефіцієнт гармонійної лінеаризації в методі гармонійної лінеаризації. В загальному випадку WН складається з речовинної і уявної комплексної складових.
В даному випадку WН(s) – це дійсне число.
В загальному випадку: ![]() .
.
В даному випадку: ![]() ;
; ![]() .
.
Для K=1, WН(s) виглядає таким чином (малюнок 5.5)
Малюнок 5.5 – Дійсне число WН для K=1
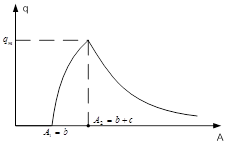
Величина q для однозначної нелінійності залежить тільки від амплітуди А.
Оскільки K=1, то нелінійність виглядає таким чином (малюнок 5.6)
Поки амплітуда А не перевищує зону нечутливості b, тобто до А=b, система розімкнена і A=0.
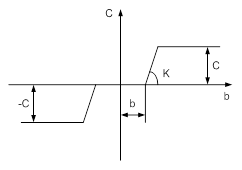
Малюнок 5.6 – Нелінійність для K=1
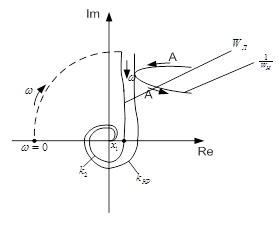
Побудуємо годограф для WЛ(s) і  (малюнок 5.7)
(малюнок 5.7)
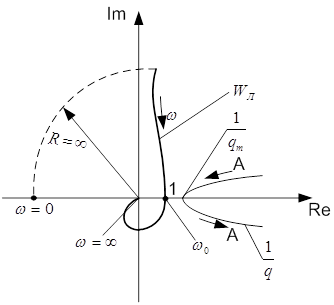
Малюнок 5.7 – Годограф для WЛ(s) і
де  .
.
Розглянемо передавальну функцію лінійної частини системи для будь-якої лінійної передавальної функції можна записати:
 (5.2)
(5.2)
Такий запис справедливий, якщо передавальна функція не має нульових полюсів.
А і В-це поліноми від ω.
А – парний ступінь ω; В-непарний ступінь ω.
Крапка 1 на годографі характерна тим, що фазовий зсув чисельника рівний фазовому зсуву знаменника передавальної функції.
Сумарна ФЧХ такої ланки рівна фазовій характеристиці чисельника мінус фазова характеристика знаменника; значить фазовий зсув рівний нулю: , звідси
, звідси  при
при ![]() . Визначимо модуль передавальної функції лінійної частини системи.
. Визначимо модуль передавальної функції лінійної частини системи.
А0 – модуль передавальної функції на частоті ![]() :.
:.
Знайдемо значення частоти ![]() .
.
 ;
;
![]() ;
;
 ;
;
 ;
;  .
.
З одержаних співвідношень визначаємо значення кругового коефіцієнта нелінійного сервоприводу.
 ;
; .
.
Систему більш високого порядку можна апроксимувати системою більш низького порядку для частот в околиці ![]() .
.
0 комментариев