Структура сервоприводу
Метод безпосередньої лінеаризації
Аналіз і синтез досліджуваної системи управління сервоприводу з урахуванням впливу нелінійних ділянок
Датчик зворотного зв'язку
Нелінійності сервоприводу
Отримання частотних характеристик
Оцінка реалізованої періоду дискретності
Розробка принципової схеми обчислювача
Дослідницька частина
Розрахунок сервоприводу з нелінійною ланкою
Комплексний план теми НДР
Виконавці і тривалість робіт
Розробка мережного графіка, побудова лінійної карти мережі, графіка розвантаження виконавців
Розрахунок ціни теми
Можливі надзвичайні ситуації в районі робочого місця або вузу
Навигация
Оцінка реалізованої періоду дискретності
Дослідження сервоприводу з урахуванням нелінійності
111400
знаков
14
таблиц
24
изображения
4.2.3 Оцінка реалізованої періоду дискретності
Заданий період дискретності складає ![]() . Стандартна тактова частота мікроконтролера МК51
. Стандартна тактова частота мікроконтролера МК51 ![]() , що використовується, отже, період імпульсів для таймера МК51 складе
, що використовується, отже, період імпульсів для таймера МК51 складе ![]() . Максимальний інтервал часу реалізовуваний таймером
. Максимальний інтервал часу реалізовуваний таймером ![]() . Оскільки
. Оскільки ![]() , то даний період дискретності може бути реалізований тільки апаратними засобами МК51 (таймер в 16-бітовій конфігурації рахункового регістра).
, то даний період дискретності може бути реалізований тільки апаратними засобами МК51 (таймер в 16-бітовій конфігурації рахункового регістра).
4.2.4 Оцінка реалізації обчислювача на особливі ситуації
Особливими ситуаціями в системі, що розробляється, є сигнали переривань. Джерела переривань і пов'язані з ними події дані в таблице. 4.1
Таблиця 4.1 Джерело переривань і пов'язані з ними події дано
| Подія | Сигнал | Дія | Обробка | Додаткові умови |
| Завершення періоду | Переривання від таймера | Перезапис стартового числа і перехід на початок функціонального алгоритму | В спеціальній процедурі | Вищий пріоритет |
| Прийом байта з буфера паралельного порту | Переривання від паралельного порту | Читання коду (1 байт) з буфера паралельного порту | В спеціальній процедурі |
4.2.5 Структура повного алгоритму роботи системи
Повний алгоритм функціонування обчислювача за рішенням задачі управління складається з таких етапів:
1. Прийом коду із значенням управляючого сигналу (по сигналу готовності, який обробляється через канал переривання).
2. Прийом коду із значенням сигналу з датчика положення ![]() .
.
3. Реалізація обчислень (узгодження вхідних сигналів, реалізація закону управління).
4. Очікування завершення періоду, реалізоване через очікування сигналу переривання від таймера.
5. Перезапуск таймера (запис стартового числа) і перехід до пункту 1.
4.3 Побудова функціональної схеми спецобчислювача
Спецобчислювач призначений для перетворення і обробки інформації тією, що подається з датчиків. На вхід спецобчислювача подається аналоговий сигнал в діапазоні 0…+5В, а на виході одержуємо аналоговий сигнал в діапазоні 0…+10В. Функціональна схема спецобчислювача представлена на малюнку 4.2. Для здійснення керованої передачі аналогової інформації в АЦП застосований 8-розрядний аналоговий комутатор з дешифратором, який комутує вихід з 0 і 1 з 8 аналогових входів. В нашому випадку всю решту входів заземлимо, окрім останнього, який залишимо для виходу з підсилювача потужності. Номер даного входу визначається двійковим номером, заданим на управляючих входах. Інформація про двійковий номер поступає безпосередньо від мікроконтролера. Для перетворення 8-розрядного дискретного коду в аналоговий застосовний 10-розрядний ЦАП, для цього на два розряди ЦАП подамо землю. З цього виходить, що в обчислювач повинні входити: мікроконтролер (МК), АЦП, ЦАП, пристрій виборкихраніння (УВХ), аналоговий комутатор (АК).
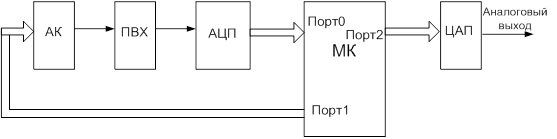
Малюнок 4.2 – Функціональна схема спецобчислювача
4.3.1 Формування алгоритму роботи спецобчислювача
Спецбчислювач на базі мікроконтролера виконує наступні операції:
– отримання і обробка інформації з підсилювача, датчика зворотного зв'язку по положенню і датчика кутової швидкості;
- реалізація закону управління;
- видача аналогового сигналу на електрогідравлічний перетворювач.
На малюнку 4.3 представлений спрощений алгоритм роботи обчислювача по отриманню, перетворенню і передачі даних. Алгоритм представлений у вигляді блок-схеми.
На основі запропонованого алгоритму роботи складена програма роботи управляючого обчислювача, побудованого на основі мікроконтролера AT89S8252 фірми Atmel.
Розроблена програма вводиться в керований обчислювач за допомогою LPT-порту ПК і каналу програматора, який здійснює прошивку резидентної пам'яті програм мікроконтролера.
4.4 Розробка структури ПО і оцінка необхідних ресурсів
Програмне забезпечення для вирішення даної задачі складатиметься із структурних елементів, характеристика яких представлена в таблиці 4.2.
Таблиця 4.2 Характеристика структурних елементів ПО
| № | Назва і функціональне призначення | Передбачуваний об'єм коду, байт | Передбачуваний об'єм даних, байт | Макс. час виконання, мс | Вимоги по розміщенню в пам'яті |
| 1 | Початковий пуск і ініціалізація (стік, таймери, переривання) | 50 | Регістри РСФ, стік в РПД (16 байт) | 0.1 | Після таблиці векторів переходу |
| 2 | Функціональний алгоритм ПД-регулювання | 100 | РПД (до 30) | 10 | довільне |
| 3 | Процедури уведення-виведення і управління ЦАП | 150 кожна | РПД (до 10 байт) | 1 кожна | довільне |
| 4 | Арифметичні процедури для 2-байтових чисел («+»,» – «,»*») | До 30 байт («+»,» – «) і до 100 («*») | Банк Рон (8 байт) | 0.05 і 0.2 | довільне |
| 5 | Таймірованіє (період | 20 | РСФ | 0.02 | довільне |
Під процедурами введення(висновку) маються на увазі дії по управлінню каналом введення(висновку), по перетворенню числа. Загальна діаграма завантаження обчислювача в межах базового періоду роботи ![]() представлена на малюнку 4.4.
представлена на малюнку 4.4.

Малюнок 4.4 – Діаграма завантаження обчислювача
На схемі цифрами позначені:
1. Установка адреси роботи.
2. Дозвіл роботи аналогового комутатора.
3. Дозвіл роботи УВХ і АЦП.
4. Час перетворення.
5. Читання даних.
6. Заборона роботи АЦП і аналогового комутатора.
7. Установка адреси на аналоговий комутатор.
8. Дозвіл роботи аналогового комутатора.
9. Дозвіл роботи УВХ і АЦП.
10. Час перетворення.
11. Читання даних.
12. Визначення значення управляючої дії.
13. Вибір закону управління на Порт 2.
Максимальний час на виповнення алгоритму в межах базового періоду складає (на підставі таблицы 4.2):
![]() ,
,
де ![]()
(![]() – час виконання функціонального алгоритму).
– час виконання функціонального алгоритму).
Тоді ![]() .
.
Оскільки ![]() <, то циклограма малюнка 2.4 може бути реалізована на даному процесорі безпосередньо.
<, то циклограма малюнка 2.4 може бути реалізована на даному процесорі безпосередньо.
Необхідний об'єм пам'яті програм (ПЗП) складає:
![]() байт.
байт.
Об'єму ПЗП достатньо для виконання алгоритму, оскільки об'єм РПП складає 4096 байт.
0 комментариев