Анализ способов повышения надежности и долговечности работы манжетных уплотнений валов автомобилей
Экспериментальные исследования процесса обработки выглаживанием широким самоустанавливающимся инструментом
Далее для упрощения расчета произвести развертку цилиндрической поверхности так, как показано на рис. 4.1.б;
Алгоритм решения систем нелинейных уравнений численным методом
Выбор необходимого решения из решений полученных на этпах. 5.1. и 5.2. путем отыскания из них решения с наименьшим значением y
Анализ результатов математического моделирования
Определение затрат на НИР (предпроизводственных затрат)
Расчет экономического эффекта от реализации проекта
Навигация
Выбор необходимого решения из решений полученных на этпах. 5.1. и 5.2. путем отыскания из них решения с наименьшим значением y
Повышение надежности и долговечности работы манжетных уплотнений валов автомобилей ВАЗ
106261
знак
13
таблиц
35
изображений
6. Выбор необходимого решения из решений полученных на этпах. 5.1. и 5.2. путем отыскания из них решения с наименьшим значением y.
Таким образом, алгоритм программы обладает своего рода элементами искусственного интеллекта:
1) выбор начального шага итерации в блоках 9, 18 блок схемы (см. этап 4 вышеприведенного алгоритма);
2) выбор оптимального значения параметра t на начальном этапе итерации в блоках 9, 18 блок схемы;
4) мониторинг процесса итерации в целях предотвращения поиска решения за пределами области возможных решений системы нелинейных уравнений.
4) Изменение шага в процессе итерации для ускорения поиска решения.
По данному алгоритма была разработана блок схема и по которой написана программа на Delphi (см. приложение).
На базе данного алгоритма можно создавать алгоритмы для решения и других видов систем нелинейных уравнений, которые нельзя решить аналитически.
4.1.2 Алгоритм для расчета нескольких оборотов детали
В пункте 4.1 была представлена математическая модель для расчета геометрии поверхности, обработанной детали ППД по схеме, представленной на рис. 1.24. Но при расчетах был учтен только один оборот детали (один цикл нагружения), а этого может быть недостаточно для придания готовому изделию необходимых геометрических характеристик и физико-механических свойств. Поэтому необходимо усовершенствовать алгоритм расчета для того, чтобы он позволял рассчитать геометрию поверхности детали и после нескольких циклов нагружения.
Для того, чтобы рассчитать геометрию детали не при первом, а при втором и последующих циклах нагружения необходимо для расчета координаты рассматриваемой точки использовать выражение:
 ,(4.13)
,(4.13)
где pD – длина окружности обрабатываемой детали, мм; Nцикла – число совершенных оборотов.
После второго оборота детали необходимо из двух рассчитанных матриц создать новую, которая состояла бы из элементов с минимальными значениями, то есть:
![]() ,(4.14)
,(4.14)
где ![]() – значение элемента матрицы, полученное после двух циклов нагружения, мм;
– значение элемента матрицы, полученное после двух циклов нагружения, мм; ![]() – значение элемента матрицы, полученное на первом обороте детали, мм;
– значение элемента матрицы, полученное на первом обороте детали, мм; ![]() – значение элемента матрицы, полученное на втором обороте детали, мм;
– значение элемента матрицы, полученное на втором обороте детали, мм;
Далее рассчитываются значения элементов матрицы, полученные на третьем обороте детали и сравниваются с ![]() и т.д. пока не будут учтены все циклы нагружения.
и т.д. пока не будут учтены все циклы нагружения.
Выбор минимального значения zi,j обоснован тем, что на базе минимальных значений элементов матрицы и будет формироваться геометрия обработанной детали, так как инструмент при этих значениях максимально внедряется в обрабатываемую поверхность.
Выражение 4.14 с учетом n циклов нагружения в общем виде можно записать следующим образом:
![]() ,(4.15)
,(4.15)
где ![]() – значение элемента матрицы, полученное после n циклов нагружения, мм;
– значение элемента матрицы, полученное после n циклов нагружения, мм; ![]() – значение элемента матрицы, полученное на n-1 обороте детали, мм;
– значение элемента матрицы, полученное на n-1 обороте детали, мм; ![]() – значение элемента матрицы, полученное на n-м обороте детали, мм;
– значение элемента матрицы, полученное на n-м обороте детали, мм;
Если необходимо найти кратность приложения нагрузки к каждой точке – k (k равно числу корней системы уравнений 4.10.), то можно воспользоваться следующим выражением:
![]() ,(4.16)
,(4.16)
где ![]() – значение кратности приложения нагрузки, полученное после n оборотов;
– значение кратности приложения нагрузки, полученное после n оборотов; ![]() – значение кратности приложения нагрузки, полученное на n-1 обороте детали;
– значение кратности приложения нагрузки, полученное на n-1 обороте детали; ![]() – значение кратности приложения нагрузки, полученное на n-м обороте детали;
– значение кратности приложения нагрузки, полученное на n-м обороте детали;
Во время обработки могут участвовать не один инструмент, а несколько (они колеблются с одинаковой частотой, но одни из них могут колебаться синхронно или асинхронно по сравнению с первым (базовым)). Данный расчет проводится после того, как будет рассчитана геометрия обработанной поверхности после совершения необходимого количества циклов нагружения от одного инструмента, если есть асинхронно работающие инструменты, то необходимо рассчитать геометрию, которую формирует данный инструмент (для этого в системе уравнений 4.10 необходимо, чтобы NF =p).
Далее расчет основан на том, что каждый рассматриваемый инструмент если бы работал независимо (один), то формировал бы такую же поверхность, как и первый (базовый), но данная поверхность будет смещена по окружности детали относительно геометрии, которая могла бы быть получена работы первого инструмента от py точек:
![]() ,(4.17)
,(4.17)
где значение b берется согласно рис. 4.14.
Формирование окончательной поверхности при учете работы всех инструментов ведется аналогично, как в пункте 4.1.2 при учете нескольких оборотов детали.
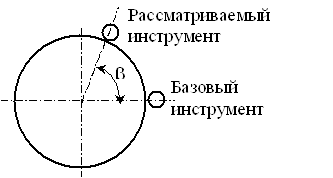
Рис. 4.14. Пояснительная схема к формуле 4.17
Тогда:
![]() , при i³Ky-py;
, при i³Ky-py;
![]() , при i<Ky-py;
, при i<Ky-py;
![]() , при i³Ky-py;(4.18)
, при i³Ky-py;(4.18)
![]() , при i<Ky-py,
, при i<Ky-py,
где при рассмотрении ![]() необходимо учесть синхронным или асинхронным является инструмент.
необходимо учесть синхронным или асинхронным является инструмент.
В результате расчетов мы имеем матрицу с элементами ![]() характеризующую геометрию поверхности. Также с учетом уравнений 4.16. и 4.18., можно сформировать матрицу с элементами ki,j, характеризуя кратность приложения нагрузки к каждой точке обрабатываемой поверхности.
характеризующую геометрию поверхности. Также с учетом уравнений 4.16. и 4.18., можно сформировать матрицу с элементами ki,j, характеризуя кратность приложения нагрузки к каждой точке обрабатываемой поверхности.
На основе приведенных расчетов была создана программа по расчету микропрофиля обработанной поверхности на языке программирования Delphi (см. приложение).
4.2 Внесение в математическую модель изменений, для учета физико-механических параметров обработкиПри разработке механико-математической модели c учетом физико-механических параметров необходимо учесть динамические эффекты, а также достаточно развитые в окрестностях контактной зоны упругопластические деформации. Динамические задачи упругопластического взаимодействия тел изучены относительно слабо, что определяется сложностью их постановки и, зачастую, недостаточностью математических методов решения модельных краевых задач механики сплошной среды. Наибольшее продвижение в этой области связано с интенсивным развитием прямых численных методов и схем решения сложных физически нелинейных задач. Недостатками этих методов является их громоздкость и принципиальная ограниченность практических возможностей, связанная с уровнем используемой ЭВМ. Поэтому особо следует выделить актуальность использования аналитических методов, позволяющих анализировать решение задач и дающих в руки исследователя контрольные варианты для тестирования программных средств, реализующих численные алгоритмы и методы. Использование аналитических методов при построении решения модельных задач возможно при введении некоторых упрощающих физически непротиворечивых предположений [1,3,13,23].
Следует отметить, что этот подход не является тривиальным, что подтверждается весьма ограниченным числом публикаций на эту тему.
Таким образом внесение в модель изменений для учета физико-механических параметров обработки можно осуществить двумя путями:
1) Попытаться решить эту задачу на уровне конечных элементов (КЭ) при геометрическом моделировании процесса обработки, введя в математическую модель упругопластические связи между КЭ.
2) Внести в созданную математическую модель (п. 4.1.) корректирующих коэффициентов, полученных при проведении экспериментальных исследований.
Второй путь на данном этапе развития науки является более предпочтительным, потому что, как уже было сказано выше, динамические задачи упругопластического взаимодействия тел изучены относительно слабо, и практически отсутствует математические подходы в их применении при моделировании реальных процессов.
4.3 Визуализация выходных данных математической моделиСуществуют различные программы для персональных компьютеров способные производить моделирование тех или иных явлений методом конечных элементов, однако все они имеют в своих алгоритмах те или иные допущения, которые по мнению авторов дают пренебрежимо малую погрешность при вычислениях. Но на практике зачастую оказывается, что из-за этих допущений погрешность вычисления оказывается крайне велика. В этих случаях следует отказаться от готовых прикладных Cad/Cam, воспользоваться системами программирования. В настоящее время широкое распространение получили следующие языки: СИ, СИ++, Паскаль, Бейсик, Ассемблер, Джава. Особую популярность и доверие получил Паскаль. Он очень долго просуществовал на рынке программных продуктов, и за время свое существование неоднократно модифицировался и совершенствовался. Последние версии данного продукта легки в использование, позволяет получить эффективные программы, имеет богатые библиотеки базы данных и мощные возможности отладки и коректировки разрабатываемых программ. Корпорацией Borland, был разработан Object Pascal, в основе которого лежит классический Паскаль. Именно Object Pascal служит для разработки программ в среде Delphi., ориентированные на многофункциональную в среде Windows.
Delphi в отличии от обыкновенного Паскаля носит технологию визуального проектирования и методологию объектно-ориентированного программирования, что облегчает процесс создания программ. Благодаря вышеперечисленным достоинствам, именно это язык программирования был выбран для реализации алгоритма математической модели, представленной в п.4.1. В приложении 3 представлена программа, реализующая алгоритм моделирования обработанной поверхности по схеме, показанной на рис. 1.24.
Но результаты моделирования эффективнее все-таки визуализировать в готовых прикладных программах.
Система MATLAB предлагается разработчиками (фирма MathWorks, Inc.) как язык математического программирования высокого уровня для технических вычислений. Еще в 1998г. систему использовали свыше 500 000 легально зарегистрированных пользователей, ее охотно используют в своих научных проектах ведущие университеты и научные центры мира.
Одно из достоинств системы MATLAB – обилие средств графики, начиная от команд построения простых графиков функций одной переменной в декартовой системе координат и кончая комбинированными и презентационными графиками с элементами анимации, а также средствами проектирования графического пользовательского интерфейса (GUI). Особое внимание в системе уделено трехмерной графике с функциональной окраской отображаемых фигур и имитацией различных световых эффектов [10, 9].
На рис 4.15. показано, как можно визуализировать матрицу с результатами расчетов (см .рис. 4.2) в математическом пакете MATLAB с помощью команды ‘mesh’ в виде матричной сетки, или в виде сплайновой поверхности с помощью команды ‘surf’.
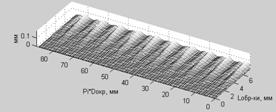

а) б)
Рис. 4.15. Визуализация результатов моделирования:
а – в виде матрицы сетки; б – в виде сплайновой поверхности
Похожие работы

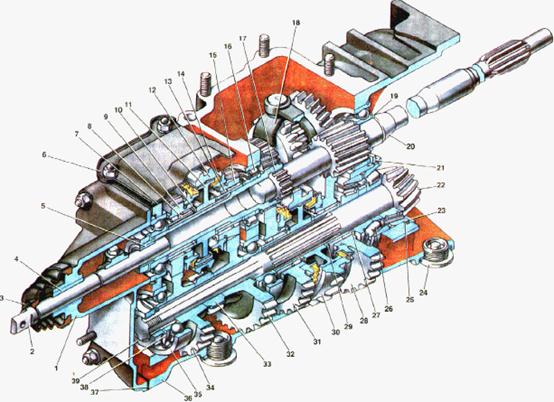
... хода зубчатое колесо 3 передвигают назад, вводя его в зацепление с промежуточным зубчатым колесом 5 передачи заднего хода, свободно вращающимся на своей оси. Общее устройство коробки передач На различных автомобилях устройство коробки передач может отличаться, но принципиальная схема остаётся примерно одинаковой. В этом разделе мы рассмотрим общее её устройство. Коробка передач (рис. 1) ...
... -12рк (ТУ 38.101844-80). ТАД-17И (класс 18) получают смешением остаточного и дистиллятного масел с введением многофункциональной и депрессорной присадок. Масло обладает высокими эксплуатационными свойствами, является универсальным и может применяться в тяжелонагруженных цилиндрических, спирально-конических и гипоидных передачах грузовых и легковых автомобилей в умеренной и жаркой климатических ...
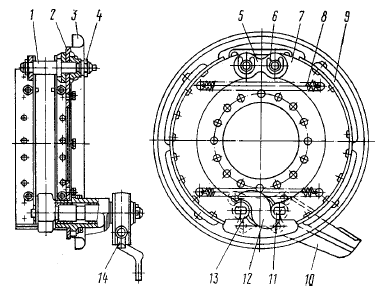
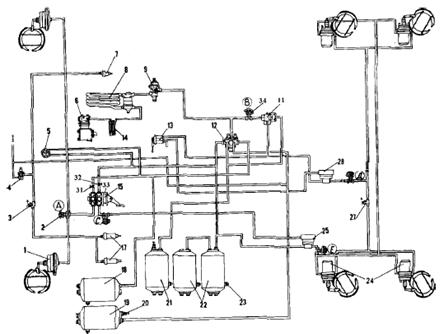
... колодка тормозная; 8 – пружина; 9 – накладка фрикционная; 10-кронштейн разжимного кулака; 11 – ось ролика; 12 – кулак разжимной; 13 – ролик; 14 – рычаг регулировочный 1.2 Устройство тормозной системы с пневматическим приводом Устройство тормозной системы показано на рис. 1.2. Источником сжатого воздуха в приводе является компрессор 9. Компрессор, регулятор давления 11, предохранитель 12 от ...
0 комментариев