Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
Введение
Одной из самых массовых землеройно-транспортных машин, применяемых в дорожном строительстве является автогрейдер. На долю автогрейдера отводятся планировочные и профилировочные работы по возведению земляного полотна. Существующий СНиП предъявляет высокие требования к точности соблюдения геометрических параметров земляных сооружений, в то время, как серийно выпускаемые автогрейдеры у нас в стране и за рубежом, даже оснащенные системами стабилизации рабочего органа не содержат устройств индикации предоставляющих объективную информацию о точности соблюдения геометрических параметров дорожного полотна. Возникло серьезное противоречие между непрерывно возрастающими требованиями к производительности планировочных работ при высокой точности геометрических параметров земляного полотна и отсутствием систем индикации на серийно выпускаемых машинах. В результате этого даже автоматизированный автогрейдер вынужден совершать лишние проходы по обрабатываемому участку.
Решить возникшие противоречия позволяет система управления рабочим органом автогрейдера, оснащенная устройствами индикации, которые предоставляют механику-водителю количественную информацию о геометрических параметрах земляного полотна или отклонениях от заданных параметров. Сокращение числа проходов по обрабатываемому участку повышает производительность землеройно-транспортной машины, а обеспечение требуемой геометрической точности существенно сокращает расход дорогостоящих строительных материалов. Появляется возможность проведения планировочных работ без привлечения нивелировщиков.
На основании вышеизложенного тема работы, направлена на дальнейшее совершенствование систем управления рабочим органом автогрейдера путем оснащения их устройствами индикации, является актуальной.
1. Состояние вопроса. Цель и задачи исследования
1.1 Критерии эффективности планировочных работ автогрейдера
Обоснованный анализ эффективности землеройно-транспортных машин не может быть осуществлен без выявления взаимосвязи системы показателей машины с показателями эффективности их функционирования.
При формировании показателей эффективности необходимо принимать во внимание, что показатели должны обеспечивать
выявления влияния на эффективность машины всего многообразия определяющих факторов технических параметров, условий производства, эксплуатации и др.;
получения обоснованных рекомендаций для выбора рациональных технических параметров машины, совокупность которых определяет ее технико-экономическую эффективность.
Кроме того, показатели должны удовлетворять следующим требованиям:
иметь технико-экономическую основу;
соответствовать цели, достигаемой в результате применения оборудования;
иметь иерархическую структуру, т.е. включать частные показатели в более общие.
Установление связей между отдельными критериями эффективности осуществляются на основании анализа интегральных показателей. В качестве обобщенного интегрального показателя используют зависимость для расчета приведенных удельных затрат на единицу продукции.
![]() ,
,
где Z – приведенные затраты;
П – эксплуатационная производительность.
Величину Z определяют в соответствии с отраслевой инструкцией:
![]() ,
,
где U – текущие затраты потребителя, связанные с выполнением технологического процесса без учета отчислений на реновацию техники;
ЗК – капитальные затраты, связанные с созданием, производством, доставкой и монтажом техники;
P – отчисления на реновацию от капитальных затрат;
EН – нормативный коэффициент эффективности;
КЭ – сопутствующие капитальные вложения потребителя на эксплуатацию техники.
Для показателей эффективности характерна иерархическая структура построения, с точки зрения полноты охвата параметров, определяющих протекание процесса с включением частных показателей более низкого уровня в общие.
Показатель 1‑го уровня целесообразен для оценки комплексов систем и машин, если известно, что коэффициенты удельных приведенных затрат для сравниваемых объектов существенно изменяются.
Показатель 2‑го уровня имеет то же назначение, что показатель интегральный 1‑й, но при условии, что для нового объекта коэффициенты приведенных удельных затрат на эксплуатацию и основные фонды значительно не изменяются по сравнению с эталоном. Он дает возможность оценить экономию энергетических и материальных затрат.
Показатели 3‑го и 4‑го уровня оценивают основные группы подсистем машин или комплексов энергетического и технического назначения. Показатель 5‑го уровня – один из важнейших, так как все показатели более высокого уровня могут быть установлены только при известном значении производительности. Показатели более низкого уровня позволяют определить качество машины при неизменных параметрах, входящих в показатели более высокого уровня.
Так как часть показателей, входящих в состав такого обобщенного критерия, как удельные приведенные затраты, может быть установлена весьма приблизительно, целесообразней применять более низкие по иерархическому уровню показатели.
Показатель производительности для автогрейдера имеет вид
м285с.
Сравнительная оценка только по показателю производительности, без учета показателей, характеризующих планирующие свойства автогрейдера, не позволяют объективно и всесторонне оценить эффективность машины. В качестве критериев, характеризующих точность обработки грунта автогрейдером, могут быть выбраны различные ограничивающие и экстремальные условия, но общим для них является то, что они являются вероятностными характеристиками случайных функций, описывающих рабочий процесс автогрейдера.
Одним из наиболее жестких условий является равенство нулю математического ожидания погрешности и минимум ее дисперсии:
или эквивалентное условие – равенство математического ожидания величины параметра точности по номинальному значению и минимум дисперсии:
В ряде случаев достаточно задать ограничения по дисперсии:
где -допустимое значение дисперсии.
Выполнение условия при незначительном проигрыше в точности землеройной машины, по сравнению с условиями и, может дать значительный выигрыш в других ее показателях, например, уменьшить массу, габариты, стоимость, трудозатраты в эксплуатации и др.
Однако в ряде случаев нецелесообразно, а иногда и невозможно использовать абсолютные величины дисперсий для проведения сравнительных оценок точностных параметров машин. В этом случае в качестве критерия точности в работе предлагается использовать, так называемый, коэффициент сглаживания, равный отношению среднеквадратических отклонений параметра, определяемых до и после реализации рабочего процесса. В работе предложено производить оценку планирующей способности автогрейдера двумя коэффициентами сглаживания – в продольном и поперечном направлениях. Недостатком коэффициента сглаживания в поперечном направлении является не совсем корректный выбор параметра, определяемого до реализации рабочего процесса, т.е. определяется отношение среднеквадратических отклонений угла поперечного профиля до и после обработки. Тогда как на формируемый угол поперечного профиля в силу конструктивных особенностей подавляющего большинства конструкций существующих автогрейдеров, основное влияние оказывают вертикальные премещения средней точки переднего моста автогрейдера.
Исходя из этого, в данной работе вводится коэффициент передачи возмущающих воздействий от вертикальных перемещений переднего моста автогрейдера в продольном КY и поперечном Кg направлениях.
Коэффициент КY равен отношению среднеквадратических отклонений вертикальной координаты, определяемых после и до реализации рабочего процесса.
Коэффициент Кg равен отношению среднеквадратических отклонений угла поперечного профиля после обработки и среднеквадратических отклонений вертикальной координаты до обработки.
Комплексный показатель достаточно объективно характеризует эффективность рабочего процесса, но определение весовых коэффициентов вызывает существенные трудности и связанно с субъективными оценками. Поэтому более целесообразно использовать векторный критерий эффективности, представляющий собой набор единичных показателей, характеризующих автогрейдер с различных сторон.
Таким образом, векторный критерий эффективности автогрейдера при выполнении планировочных работ имеет вид:
![]() ,
,
где Р1 – единичный показатель, характеризующий планирующую способность автогрейдера в продольном направлений КY; Р2 - единичный показатель, характеризующий планирующую способность автогрейдера в поперечном направлении Кg; Р3 – единичный показатель, характеризующий рабочую скорость автогрейдера V.
Таким образом, задача оценки эффективности того или иного усовершенствования автогрейдера или оценки влияния на качество работ того или иного параметра автогрейдера и его системы управления трансформируется в задачу определения векторного критерия при условии, что требуемые тенденции изменения единичных показателей имеют вид
Р1 ® max, Р2 ® max, Р3® max.
Кроме рассмотренных, могут быть и другие критерии эффективности при решении задач обеспечения точности автогрейдера. Их выбор зависит от типа решаемых задач, вида и объема исходной информации и др.
На основе вышеприведенного обзора критериев эффективности можно сделать вывод, что для оценки эффективности целесообразно применять более низкие по иерархическому уровню показатели, в частности производительность. На показатель производительности большое влияние оказывает количество проходов автогрейдера по обрабатываемому участку до достижения точности, установленной СНиПом. Особенности рабочего процесса автогрейдера, при проведении планировочных работ, позволяют при сокращении лишних проходов снизить затраты расходного материала. Таким образом перспективным направлением повышения эффективности автогрейдера, при проведении планировочных работ, является разработка новых систем управления рабочим органом, позволяющих добиться заданной точности геометрических параметров земляного полотна за минимальное число проходов по обрабатываемому участку.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
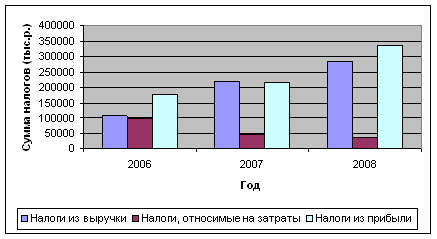
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
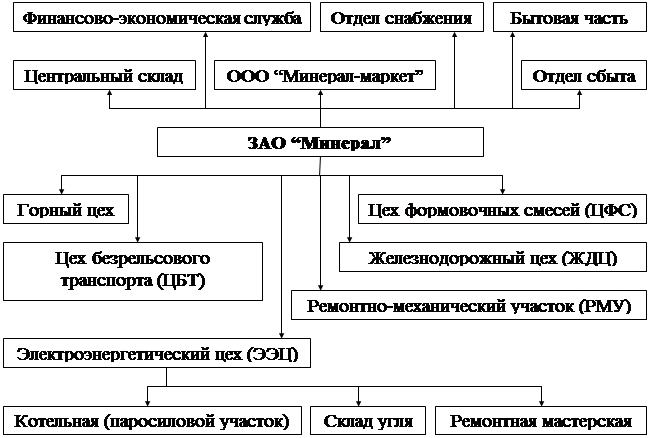
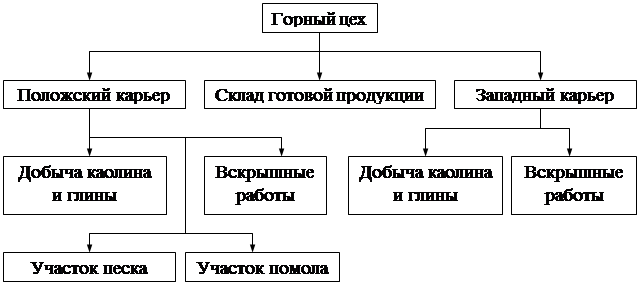
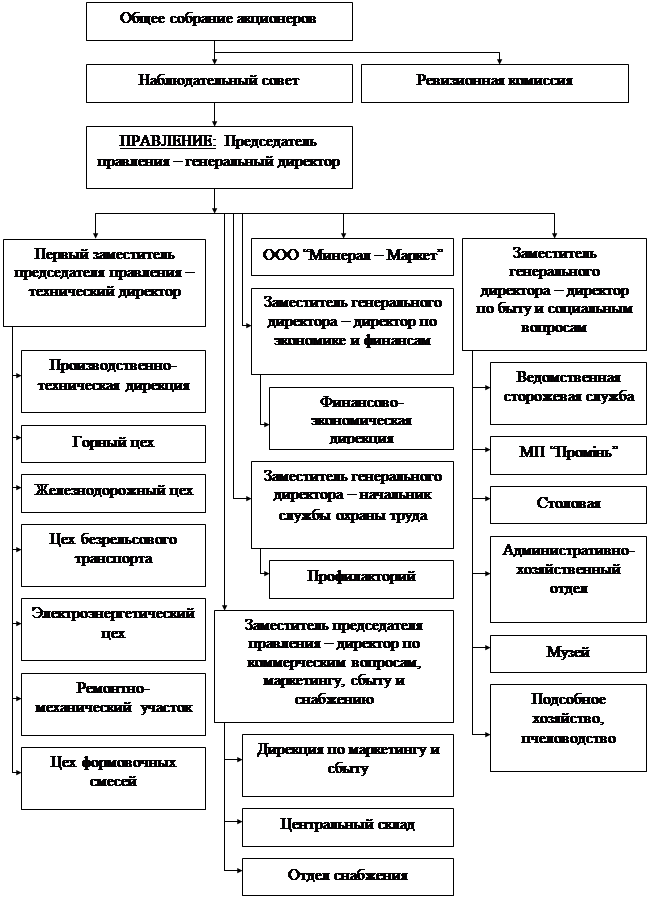
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев