Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Оценка адекватности математической модели автогрейдера
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
5.3.2 Оценка адекватности математической модели автогрейдера
Адекватность статической модели автогрейдера, реализуемой на ЭВМ по программе GRADER в соответствии с алгоритмом, структурная схема которого приведена на рис. 3.9, оценивалась по вертикальному перемещению правой крайней точки режущей кромки отвала yп при подаче детерминированного воздействия под элементы ходового оборудования.
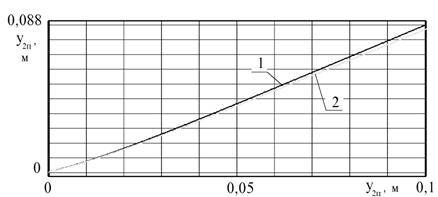
Рис. 5.4. Вертикальное перемещение крайней правой точки режущей кромки отвала при подъеме правого переднего колеса балансирной тележки: 1 – теоретическая; 2 – экспериментальная зависимость
На рис. 5.4 в качестве примера приведен график вертикального перемещения правой крайней точки режущей кромки отвала yп при подъеме правого переднего колеса балансирной тележки автогрейдера. При расчете геометрические параметры автогрейдера принимались соответствующими автогрейдеру ДЗ‑122А. Угол захвата отвала j=60o. Высота подъема изменялась от 0 до 0.1 м. Анализ расчетной зависимости показал, что она достаточно близко совпадает с экспериментальной, полученной в результате натурных испытаний. Относительная ошибка соответствия математической модели ее оригиналу не превышает 4.
Адекватность динамического математического описания автогрейдера была оценена сравнительным анализом поперечных угловых колебаний тяговой рамы. Угол наклона тяговой рамы является важной координатой, определяющей поперечный уклон дорожного полотна. На риc.5.5 приведены переходные процессы угла поперечного наклона тяговой рамы, где 1 – расчетный переходный процесс, полученный при решении численным методом системы уравнений указанной в разд. 3, для исходных данных соответствующих автогрейдеру ДЗ‑122А при j=60o; 2 – переходный процесс, полученный экспериментальным путем при освобождении правого переднего колеса балансирной тележки, предварительно приподнятого на 0.04 м. Анализ переходных процессов показал, что они имеют сложную динамическую природу и, как указано в работе, могут быть аппроксимированны выражением
 ,
,
где gо – начальная ордината; To – период колебаний; – коэффициент затухания аппроксимирующей кривой.
Достигнутая сходимость теоретических и экспериментальных переходных процессов достаточна для решения поставленных в работе задач.
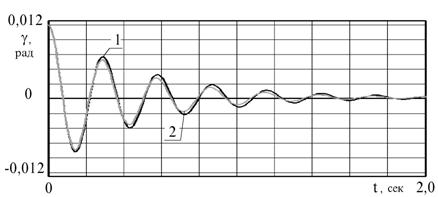
Рис. 5.5. Фрагмент переходного процесса колебаний тяговой рамы автогрейдера: 1 – теоретическая; 2 – экспериментальная зависимость
5.4 Описание ССО в поперечной плоскости с устройством индикации
При проведении планировочных работ человек, работающий даже на автоматизированном автогрейдере с использованием серийных систем управления, руководствуется своим глазомером для контроля достижения заданных геометрических параметров земляного сооружения. Для более точного контроля необходима работа нивелировщиков. Таким образом количество проходов автогрейдера по обрабатываемому участку даже автоматизированного автогрейдера определяется квалификацией обслуживающего персонала и является субъективной оценкой. Возникла необходимость разработки системы управления РО автогрейдера, дающей оперативную информацию о качестве планировочных работ, в процессе их проведения. Это позволит исключить необоснованные повторные проходы автогрейдера по обрабатываемому участку, что повысит производительность планировочных работ.
На основе изложенных в п.п. 4.1–4.4 исследований и предложенных алгоритмов работы ССО разработана система предназначенная для стабилизации РО автогрейдера в поперечной плоскости с использованием устройства индикации. Разработаны системы с различными типами УИ, в виде стрелочных и шкальных индикаторов. УИ представляет человеку-оператору оперативную информацию о величине отклонения поперечного уклона РО от заданного значения.
Система включает в себя блок управления, датчик поперечного уклона, вспомогательное гидрооборудование.
Система использует датчик поперечного уклона и вспомогательное гидрооборудование, устанавливаемые на серийных автогрейдерах.
Блок управления представлен на рис. 4.37 и устанавливается в кабине автогрейдера. Он может иметь УИ двух типов. Значение заданного уклона устанавливается задающим потенциометром, выведенным на лицевую панель, и при выполнении планировочных работ его можно регулировать.
Разработанные системы были испытаны и получили внедрение в производственных условиях. Система со стрелочной индикацией внедрена в ТОО «Касли-дорремстрой» г. Касли Челябинской области, а система со шкальной индикацией в АО «Омскагропромдорстрой» г. Омск. При испытаниях было достигнуто повышение производительности на 15–20% за счет исключения ненужных повторных проходов по обрабатываемому участку.
5.5 Описание ССО в поперечной плоскости и с устройством индикации
При проведении планировочных работ человек, работающий даже на автоматизированном автогрейдере с использованием серийных систем управления, руководствуется своим глазомером для контроля достижения заданных геометрических параметров земляного сооружения. Для более точного контроля необходима работа нивелировщиков. Таким образом количество проходов автогрейдера по обрабатываемому участку даже автоматизированного автогрейдера определяется квалификацией обслуживающего персонала и является субъективной оценкой. Возникла необходимость разработки системы управления РО автогрейдера, дающей оперативную информацию о качестве планировочных работ, в процессе их проведения. Это позволит исключить необоснованные повторные проходы автогрейдера по обрабатываемому участку, что повысит производительность планировочных работ.
На основе изложенных в п.п. 4.1–4.4 исследований и предложенных алгоритмов работы ССО разработана система предназначенная для стабилизации РО автогрейдера в поперечной плоскости с использованием устройства индикации. Разработаны системы с различными типами УИ, в виде стрелочных и шкальных индикаторов. УИ представляет человеку-оператору оперативную информацию о величине отклонения поперечного уклона РО от заданного значения.
Система включает в себя блок управления, датчик поперечного уклона, вспомогательное гидрооборудование.
Система использует датчик поперечного уклона и вспомогательное гидрооборудование, устанавливаемые на серийных автогрейдерах.
Блок управления представлен на рис. 4.37 и устанавливается в кабине автогрейдера. Он может иметь УИ двух типов. Значение заданного уклона устанавливается задающим потенциометром, выведенным на лицевую панель, и при выполнении планировочных работ его можно регулировать.
Повышение производительности планировочных работ при применении предложенной ССО и УИ ожидается около 15–20%.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
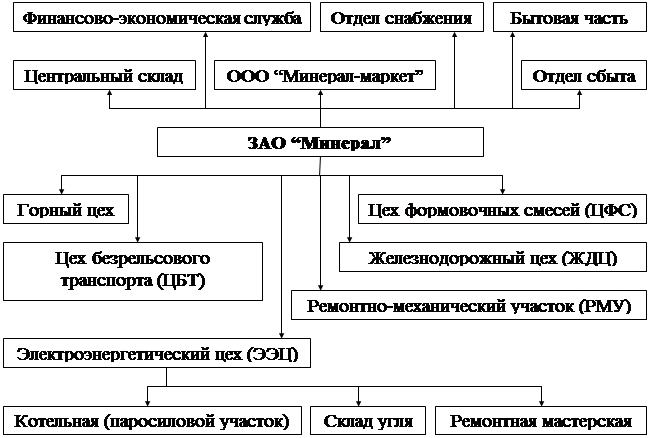
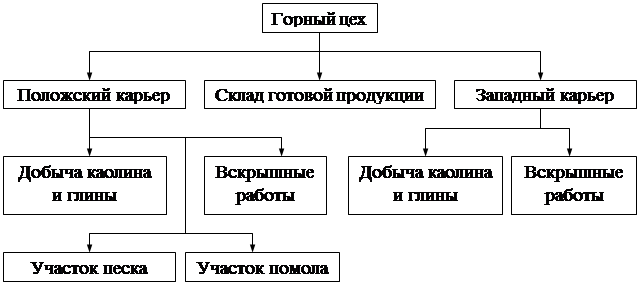
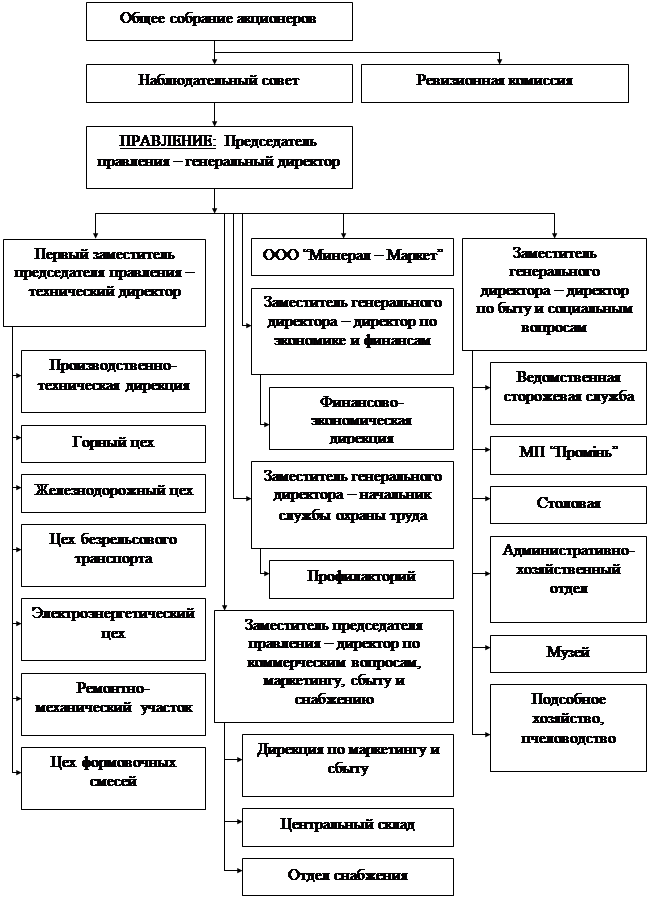
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
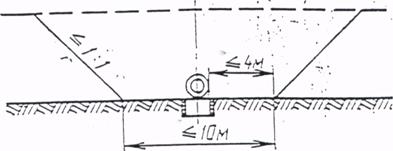
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев