Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Математическая модель автогрейдера
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
3.2 Математическая модель автогрейдера
Автогрейдер, оснащенный системой автоматического управления рабочим органом, грунт и микрорельеф обрабатываемой поверхности представляют в совокупности сложную динамическую систему. Оптимизацию параметров этой системы удобней вести на математических моделях.
Решение поставленных в работе задач требует составления уравнений геометрических связей автогрейдера, рассмотрения перемещения РО в пространстве под действием различных факторов, определения динамических характеристик объекта при различных возмущающих и управляющих воздействиях.
Анализ конструкций автогрейдеров и математических моделей предшествующих исследований позволил составить расчетную схему.
При составлении расчетной схемы были приняты следующие допущения:
– автогрейдер является пространственным шарнирно сочлененным многозвенником;
– конструктивные элементы автогрейдера абсолютно жесткие;
– элементы ходового оборудования имеют постоянный контакт с грунтом при длине пятна контакта вдоль направления движения 0,15 м;
– люфты в шарнирных сочленениях автогрейдера отсутствуют;
– отвал постоянно заглублен в обрабатываемый грунт;
– рассматриваются малые перемещения элементов расчетной схемы;
– в процессе копания перестановка элементов рабочего оборудования не производится, углы перелома основной рамы, выноса тяговой рамы и поворота отвала не меняются;
– углы перелома основной рамы и выноса тяговой рамы изменяются от 0 до 20 градусов;
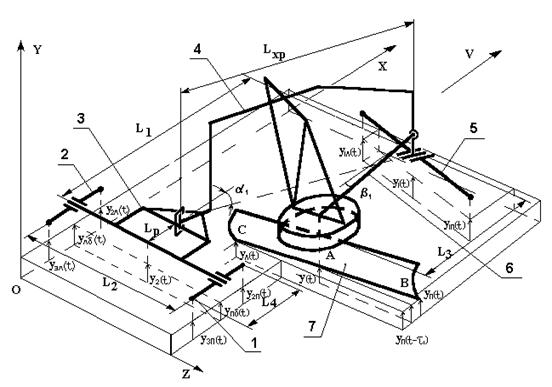
Рис. 3.6. Расчетная схема автогрейдера
– уплотнение грунта колесами пренебрежимо мало;
– динамическими колебаниями рабочего оборудования пренебрегаем;
– автогрейдер движется прямолинейно с постоянной скоростью.
Элементами расчетной схемы выбраны основные узлы автогрейдера: хребтовая балка, подмоторная рама, левый балансир, правый балансир, передняя ось, тяговая рама и поворотный круг с РО.
Элементы расчетной схемы выбраны в соответствии с наметившимися тенденциями дальнейшего совершенствования конструкций автогрейдеров. Это относится, в частности, к основной раме, которая представлена в виде шарнирно сочлененных подмоторной рамы и хребтовой балки. Благодаря этому, обобщенная расчетная схема отражает наиболее существенные признаки реальных и перспективных конструкций автогрейдеров.
Для описания положения элементов расчетной схемы в пространстве принята правая ортогональная система координат OXYZ. Ось OX совпадает с направлением движения автогрейдера, ось OY направлена вертикально вверх.
На элементы расчетной схемы наложены ограничивающие связи.
При движении автогрейдера, при выполнении планировочных работ элементы расчетной схемы имеют следующие степени свободы.
Таблица 3.1. Степени свободы элементов расчетной схемы автогрейдера при выполнении планировочных работ
| № п/п | Название элемента расчетной схемы | Степени свободы элемента |
| 1 | Балансир правый | Y, поворот вокруг оси OZ |
| 2 | Балансир левый | Y, поворот вокруг оси OZ |
| 3 | Рама подмоторная | Y, поворот вокруг осей OX, OZ |
| 4 | Хребтовая балка | Y, поворот вокруг осей OX, OZ |
| 5 | Передняя ось | Y, поворот вокруг оси OX |
| 6 | Тяговая рама | Y, поворот вокруг осей OX, OZ |
| 7 | Поворотный круг с РО | Y, поворот вокруг осей OX, OZ |
Положение хребтовой балки определяется координатами по OX, ОY и углом a1, образованным в плоскости, OXZ осью OX и осью хребтовой балки, положение тяговой рамы определяется углом b1, образованным в плоскости OXZ осью OX и осью тяговой рамы, угол j характеризует положение РО и образуется в плоскости OXZ осью OX и режущей кромкой РО.
Для определения положения произвольных точек звеньев расчетной схемы в любой момент времени от начала отсчета и установления связи между положением РО и параметрами сформированной поверхности были получены уравнения.
Положение в пространстве РО целесообразно определять по координате его центральной точки y и углу перекоса g' в момент времени t:
 ,
,
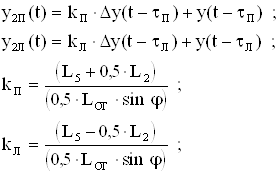
где yП, yЛ – вертикальные координаты правой и левой крайних точек режущей кромки отвала в момент времени t; LОТ – ширина отвала автогрейдера.
Для положения отвала, изображенного на рис. 3.6, поперечный профиль обрабатываемого земляного полотна, соответствующий центральной точке отвала, сформирован лишь на половине пройденного пути, расположенной справа от точки А. С другой стороны отвала профиль в момент времени t пока не сформирован, так как отвал еще не дошел до этого места. Таким образом, в момент времени t угол поперечного профиля верен для точки отвала С, максимально приближенной к задним колесам.
Тогда yпр = y;
 при j£ 90О
при j£ 90О
 при j> 90О,
при j> 90О,
где yпр – вертикальная координата профиля под центром отвала в момент времени.
 ,
,
где V – рабочая скорость автогрейдера. Из расчетной схемы видно, что
 ;
;
 ;
;
 ;
;
![]() ,
,
где y1П, y2П, y3П, y1Л, y2Л, y3Л – соответственно вертикальные координаты грунта в условных точках контакта первых, вторых и третьих правых и левых колес автогрейдера;
yПБ, yЛБ – условные вертикальные координаты правого и левого балансиров; y1 и y2 – условные вертикальные координаты центра передней и задней осей.
Так как оси балансиров жестко связаны с подмоторной рамой автогрейдера, то угол поворота автогрейдера вокруг оси OX можно выразить:
 ,
,
где L2 – ширина колеи автогрейдера.
А угол поворота вокруг оси OZ:
 ,
,
где L1 – проекция на ось OX расстояния между y1 и y2.
Из рис. 3.7 видно, что
y = y' – Dy',
где y' – условная вертикальная координата точки пересечения прямой DE и плоскости, перпендикулярной оси OX и проходящей через точку А; Dy' – приращение вертикальной координаты точки y', обусловленное перекосом автогрейдера вокруг оси OX на угол :
![]() ,
,
где ![]() ;
;
 ;
;
![]() ;
;
 ,
,
где L3 = LT cos ;
LT – длина тяговой рамы;
LХР – длина хребтовой балки.
Вертикальные координаты правой и левой крайних точек режущей кромки отвала yП, yЛ будут равны:
yП = y + Dy1 + Dy2 = y + Dy;
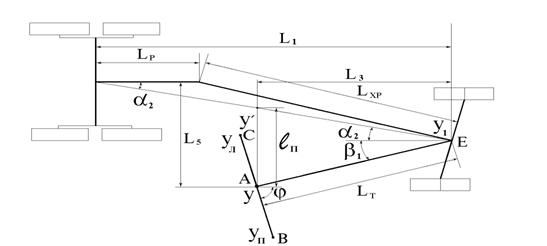
Рис. 3.7. Расчетная схема автогрейдера
yЛ = y – Dy1 – Dy2 = y - Dy,
где Dy1 – приращение вертикальной координаты точки y, обусловленное перекосом автогрейдера вокруг оси OX на угол ;
Dy2 – приращение вертикальной координаты точки y, обусловленное перекосом автогрейдера вокруг оси OZ на угол b;
Dy = Dy1 + Dy2.
![]() .
.
Подставив в, получим:
 ;
;
![]() .
.
Подставив в, получим:
 .
.
При движении автогрейдер колесами балансирной тележки обычно движется по обработанному грунту. Поэтому определим вертикальные координаты задних колес.
![]() ;
;
;
;
tП = 93838383.
В работе использовалась двухконтурная ССО. Структурная схема двухконтурной ССО представлена на рис. 3.13. Схема состоит из контура автоматического А и полуавтоматического В управления. В отличие от большинства серийных систем в схему введено устройство индикации УИ, позволяющее человеку-оператору в процессе работы контролировать геометрические параметры обработанного грунта и в случае достижения достаточной точности отключать автоматический контур.
На рис. 3.13 показаны: 1 – датчик угла; 2 – элемент сравнения; 3 – пороговый элемент; 4 – электрогидравлический привод.
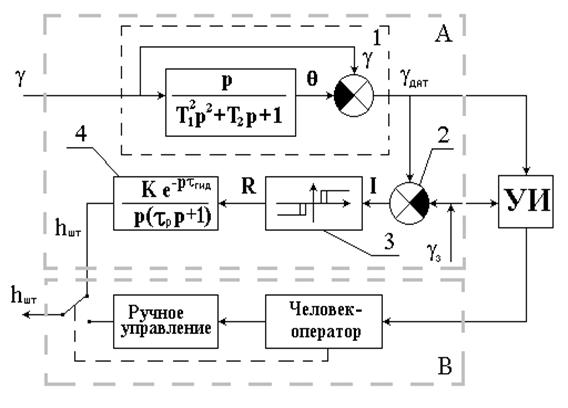
Рис. 3.13. Структурная схема ССО
На схеме человек-оператор представлен в виде блока, выполняющего функции, близкие к безинерционному реле, так как в задачи данной работы не входит исследование особенностей человека как звена систем управления, этой проблеме посвящен ряд работ представленных в разд. 1.2.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
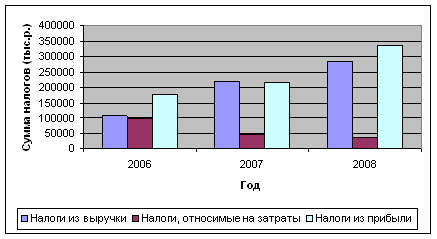
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
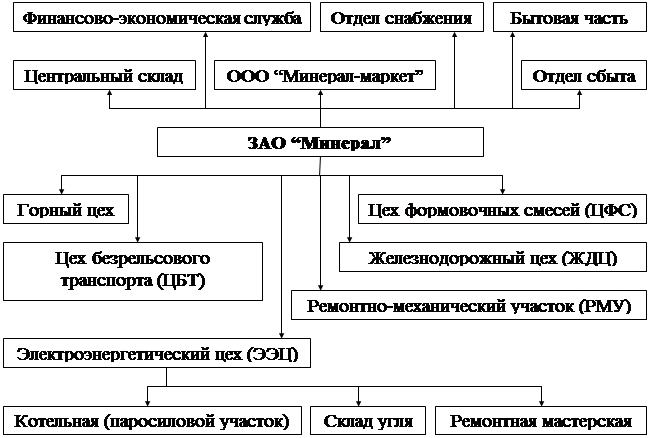
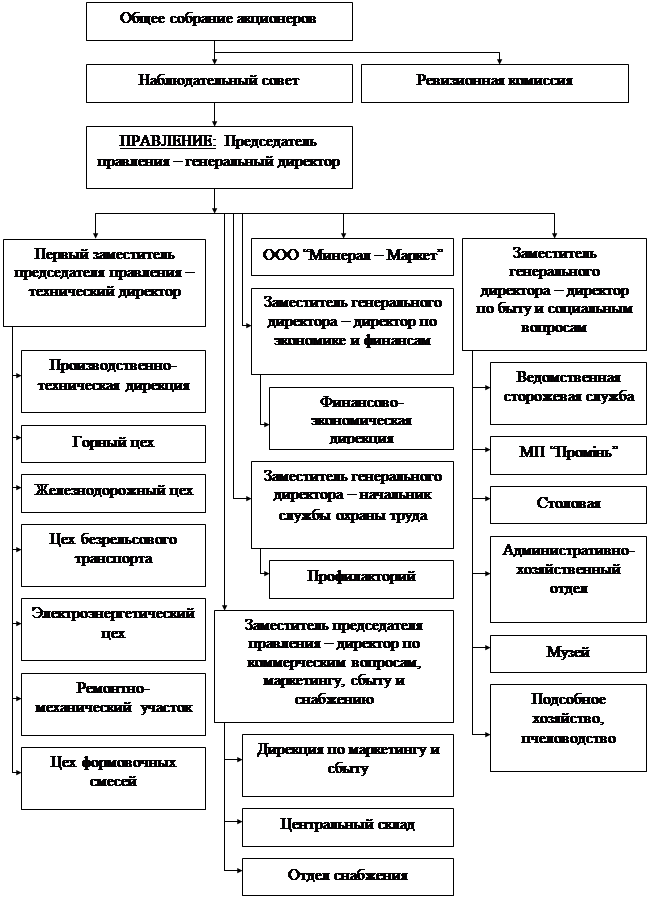
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев