Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Обоснование структуры и алгоритмов функционирования перспективной ССО
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
4.5 Обоснование структуры и алгоритмов функционирования перспективной ССО
Полную информацию о положении РО в пространстве можно получить, зная шесть параметров:
x – координату точки РО по оси OX;
y – координату точки РО по оси OY;
z – координату точки РО по оси OZ;
j – угол захвата РО;
g – угол поперечного наклона РО;
ap - угол резания.
Проанализировав процесс работы автогрейдера для ССО, можно выделить группу параметров, в наибольшей степени влияющих на точность формируемой поверхности грунта.
При формировании земляного полотна точность стабилизации РО является, по сути дела, точностью геометрических параметров формируемого земляного полотна. Учитывая СНиП, становится ясно, что важнейшими параметрами, определяющими точность земляного полотна, являются вертикальная координата y и поперечный уклон g, однако, возможно контролировать точность также по вертикальным координатам двух точек РО. ССО необходимо контролировать или вертикальную координату какой либо точки РО и поперечный уклон РО или вертикальные координаты двух точек РО.
Учитывая, что ССО в основном используются при планировочных и профилировочных работах, когда силы резания грунта не оказывают существенного влияния на точность обработки, углом резания можно в данном случае пренебречь.
В зависимости от угла выноса тяговой рамы b1 и угла перелома основной рамы a1 , меняется координата РО по оси ОZ, а также угол захвата РО j. Если не предстоит использование ССО при формировании и обработки откосов, значения a1 и b1 можно принять фиксированными, а изменение угла захвата РО j и координаты РО по оси OZ от этих углов не учитывать.
Для определения места на обрабатываемом участке, на котором произошло отклонение положения РО от заданного значения, необходимо также располагать координатой какой-либо точки отвала на плоскости, то есть координатой z и х. При формировании земляного полотна дороги, когда не ставится задача обеспечения ведения машины по заданному курсу и автогрейдер двигается по сформированному земляному полотну, достаточно располагать координатой по оси ОХ, или, иными словами, определять пройденный путь.
Учитывая выводы, сделанные в п. 4.3, для эффективной работы ССО необходимо знание угла захвата РО j.
Исходя из вышесказанного, можно выделить следующую группу параметров, характеризующих положение РО для ССО:
y – вертикальная координата центра режущей кромки РО;
g – поперечный угол наклона режущей кромки РО;
x – координата по оси ОХ от точки отсчета до центра режущей кромки РО;
j – угол захвата РО.
В разделе 4.4. было показано, что динамические свойства гидропривода оказывают существенное влияние на качество обработки грунта. Важнейшими параметрами, которые необходимо учитывать при синтезе ССО, являются: время запаздывания гидропривода tгид и скорость перемещения штока гидроцилиндра w. Оба эти параметра оказывают значительное влияние на выбор ширины зоны нечувствительности ССО.
Параметры гидропривода могут изменяться в зависимости от температуры окружающей среды, температуры и кавитации рабочей жидкости, износа элементов гидропривода и др. Учитывая это обстоятельство, в перспективных ССО целесообразно предусмотреть возможность периодического измерения параметров гидропривода и корректировки параметров ССО.
Особенность конструкции автогрейдера состоит в том, что колеса заднего моста воспринимают все неровности, сформированные отвалом, что в свою очередь приводит к перемещению автогрейдера, а вместе с ним и к изменению пространственного положения РО.
Существующие ССО не обеспечивают своевременного формирования управляющих воздействий, направленных на стабилизацию пространственного положения отвала. В перспективных ССО это можно обеспечить за счет формирования упреждающего управляющего воздействия. Для этого целесообразно обеспечить «запоминание» вертикальных координат неровностей микрорельефа, сформированного отвалом, и с учетом времени транспортного запаздывания наезда задними колесами на эти неровности, динамических характеристик гидропривода, угла захвата РО, создающего «косую» ступень, формировать упреждающие воздействия на гидропривод. При первом проходе по обрабатываемому участку перспективная ССО, обладающая памятью, может обеспечить компенсацию возмущающего воздействия со стороны микрорельефа на задние колеса автогрейдера.
При последующих проходах автогрейдера по обрабатываемому участку информация о микрорельефе, заложенная в память перспективной ССО, может быть использована и для компенсации возмущающих воздействий со стороны микрорельефа на передние колеса автогрейдера.
Перспективная ССО должна предоставлять механику-водителю не только оперативную информацию о геометрических параметрах формируемого земляного полотна в конкретный момент времени в конкретной точке трассы, но и статистическую оценку всего обрабатываемого участка, а также определять участки, на которых необходимо провести дополнительную обработку.
Это возможно реализовать в перспективных ССО за счет создания блоков индикации оперативной информации, а также обеспечения вывода на индикацию статистических характеристик микрорельефа как на всем обрабатываемом участке, так и на отдельных участках трассы.
Располагая такой ССО, автогрейдер может выполнять функции профилирографа, автоматического нивелира или, иными словами, автоматического устройства, обеспечивающего измерение и регистрацию геометрических параметров дорожного полотна.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
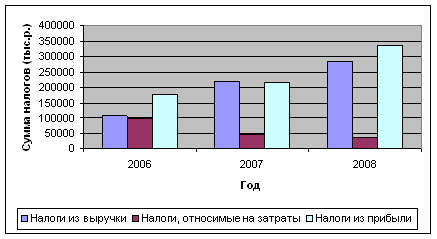
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
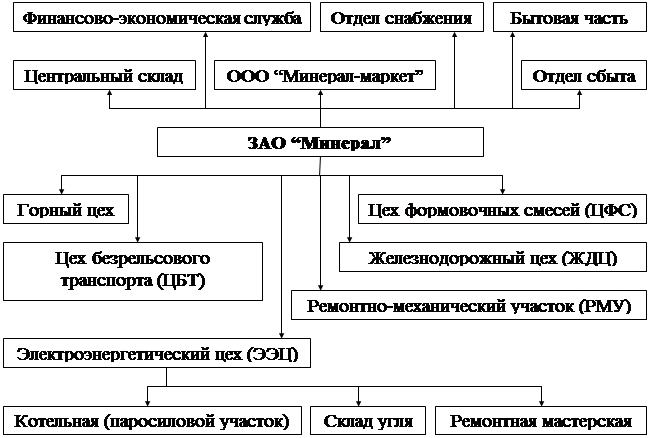
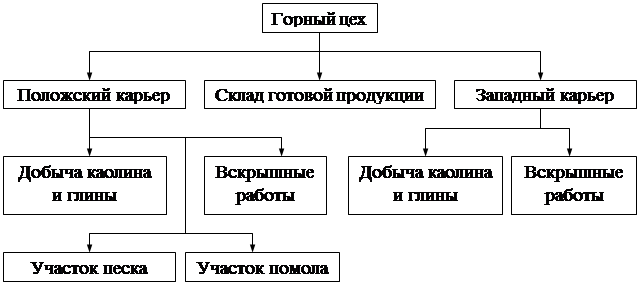
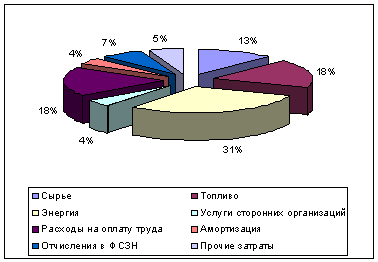
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
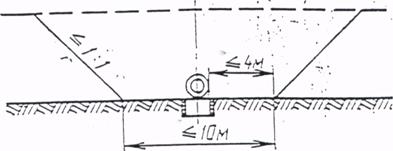
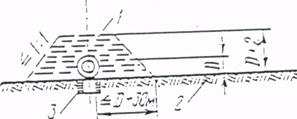
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев