Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Анализ математических моделей систем управления
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
1.2.4 Анализ математических моделей систем управления
При проведении планировочных работ оператор автогрейдера осуществляет управление положением РО, контроль параметров формируемого земляного полотна, управление направлением движения и режимами работы силовой установки. Многообразие функций оператора и высокие требования к точности земляного сооружения являются одной из причин, не позволяющих оператору обеспечивать геометрические параметры формируемой поверхности, требуемые СНиПом. В связи с этим появился целый ряд систем автоматического управления, частично или полностью исключающих оператора из контура управления положением РО.
Эффективность автогрейдеров на планировочных и профилировочных работах в значительной степени определяется совершенством систем управления РО.
Общим вопросам исследования систем управления землеройных машин и их математическому моделированию посвящены работы Т.В. Алексеевой, В.Ф. Амельченко, В.И. Баловнева, Д.П. Волкова, Б.Д. Кононыхина, Ю.М. Княжева, Э.Н. Кузина, Е.Ф. Малиновского, В.Н. Тарасова, В.С. Щербакова и др.
При всем многообразии системы управления могут быть охарактеризованы общими свойствами:
– информационными параметрами систем являются вертикальные координаты какой-либо точки отвала и угловое положение отвала относительно гравитационной вертикали;
– параметрами управления в большинстве систем управления являются вертикальное и угловое положение РО, обеспечиваемое исполнительными гидроцилиндрами подъема-опускания;
– все системы управления созданы как дополнительные устройства к существующим автогрейдерам;
– основной принцип действия систем управления заключается в компенсации отклонений отвала от заданного положения под действием внешних возмущающих воздействий.
Были проведены работы по повышению точности планировочных работ, направленные на разработку и исследование алгоритмов управления; гидропривода; копирных и бескопирных систем управления; гидромеханических и электрогидравлических систем управления.
Анализ предшествующих исследований показал, что, в зависимости от решаемых задач и принятых допущений, системы управления были описаны с различной степенью детализации.
Так, в большинстве работ использовался хорошо изученный датчик гравитационного типа, с допущением о том, что основным возмущающим воздействием является момент вязкого трения, возникающий при повороте корпуса датчика.
Математическая модель датчика может быть описана дифференциальным уравнением
![]() ,
,
где Iм – момент инерции маятника датчика;
q – угол отклонения маятника от гравитационной вертикали;
g – угол поворота корпуса маятника;
mm – масса маятника;
lm – расстояние от точки подвеса до центра масс маятника;
Dm – коэффициент вязкого трения.
Маятник в датчике можно описать следующей передаточной функцией
 ,
,
где  и
и  .
.
Это выражение описывает отклонение маятника от гравитационной вертикали q, что является динамической ошибкой датчика. При математическом описании необходимо учитывать эту ошибку. Таким образом при математическом описании с датчика поступает сигнал gдат равный: gдат = g - q.
Сигнал датчика, поступая на вход элемента сравнения, сравнивается с сигналом задатчика, а выделенный сигнал рассогласования подается на блок управления гидравлическим исполнительным элементом, который является релейным пороговым элементом. Он описывается как безинерционное реле системой неравенств:
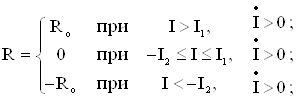
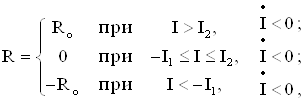
где I и R – входные выходные сигналы порогового элемента соответственно; Ro – фиксированное значение выходного сигнала, I1 и I2 – пороги срабатывания релейного элемента.
Пороговый элемент представляет собой звено для которого линеаризация недопустима, статическая характеристика такого звена имеет вид

Недостатком существующих систем автоматического управления является невозможность визуального контроля точности обработанной поверхности во время производства планировочных работ. Для устранения этого недостатка необходимо в систему автоматического управления ввести устройство индикации, учитывающее динамические свойства человека-оператора, который должен отслеживать по устройству индикации точность обрабатываемой поверхности. Система управления, оснащенная устройством индикации позволит в ряде случаев сократить число проходов автогрейдера по одному и тому же обрабатываемому участку.
Таким образом, целесообразно систему управления РО разбить на два контура: автоматического и полуавтоматического управления. Система будет работать в автоматическом режиме до принятия решения человеком-оператором на основе информации от устройства индикации.
Система автоматического управления положением РО в поперечной плоскости состоит из последовательно соединенных элементов:
– датчика угла наклона РО;
– элемента сравнения;
– порогового элемента;
– исполнительного гидропривода.
В полуавтоматическом режиме в систему управления добавляется человек-оператор. Наличие человека-оператора приводит к двум противоречивым результатам. С одной стороны, человек-оператор является наиболее универсальным и гибким звеном: человек способен переработать значительно большую и поступающую по многим каналам информацию, чем машинное звено. С другой стороны, человек уступает машине в скорости, точности выполняемых операций и в возможности длительное время сохранять заданную работоспособность.
Как видно из работ, в системе ручного управления оператор формирует управляющий сигнал на основе анализа и обобщения информации от нескольких источников. Управляющий сигнал получается в результате проведения определенных математических операций над координатами, определяющими положение элементов рабочего оборудования. После того, как сформирован управляющий сигнал, оператор вырабатывает решение на отклонение управляющего элемента и осуществляет это отклонение с помощью нервно-мускульного воздействия.
Человека-оператора, как элемент в замкнутом контуре ручного управления, можно рассматривать в виде последовательно соединенных трех функциональных звеньев: суммирующего, вычислительного и усилительного.
Суммирующее звено по динамическим свойствам представляет собой усилительный элемент с запаздыванием. Второе звено является специфическим вычислительным элементом с самонастройкой. С точки зрения динамики этот элемент обладает свойствами усилительного, инерционного и форсирующего звеньев. Инерционность обусловлена необходимостью выработки решения и зависит от объема информации. Чем меньше параметров обрабатываемой информации, тем меньше инерционность.
Форсирующее звено возникает в результате создания оператором форсирующих управляющих сигналов, с помощью которых он стремится компенсировать свою инерционность.
Усилительное звено оператора отражает нервно-мускульное воздействие на органы управления. По динамическим свойствам это инерционное звено.
Анализ предшествующих работ, посвященных математическому описанию систем управления, показал, что для элементов систем управления РО целесообразно применить формальное математическое описание, аппарат которого разработан в теории автоматического управления и успешно применяется для решения различных задач.
Для достижения поставленной в работе цели в систему управления РО автогрейдера необходимо ввести устройство индикации.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
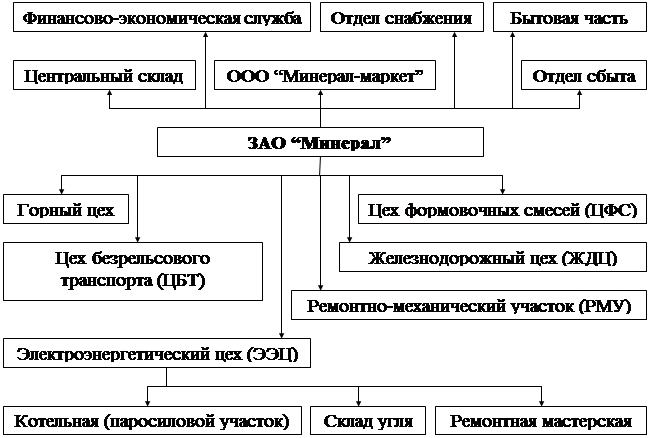
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев