Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Обобщенная математическая модель автоматизированного автогрейдера
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
3.5 Обобщенная математическая модель автоматизированного автогрейдера
Поставленные в работе задачи требуют разработки обобщенной динамической структурной схемы автоматизированного автогрейдера. Разработанная структурная схема представлена на рис. 3.14, где 1 – блок, имитирующий передний мост автогрейдера; 2 и 3 – блоки, имитирующие соответственно правый и левый балансир; 4 – блок системы ССО; 5 – блок, имитирующий реакцию грунта при копании.
Особенности обобщенной динамической структурной схемы автоматизированного автогрейдера состоят в следующем. В процессе проведения планировочных работ автогрейдер производит копание и перемещение грунта. При этом на автогрейдер действует реакция грунта копанию и перемещению, которая имеет случайный характер, а также зависит от величины срезаемой стружки. Таким образом в обобщенной структурной схеме необходима связь блоков, формирующих реакцию грунта и вертикальную координату средней точки отвала у. Используя характерный для систем типа «Профиль» способ управляющего воздействия на РО при изменении угла перекоса РО g, структурная схема изменяет вертикальную координату средней точки отвала у.
Обозначения на схеме соответствуют принятым в разд. 3.3–3.5.
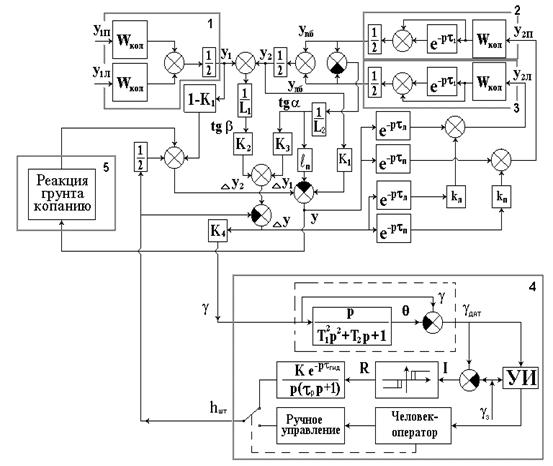
Рис. 3.14. Обобщенная динамическая структурная схема автоматизированного автогрейдера
В работе использовалась статистическая модель микрорельефа грунта по которому движется автогрейдер. Эта модель позволила разработать алгоритм и программу цифровой реализации на ЭВМ с использованием рекурентных уравнений псевдослучайного профиля.
На основе предложенной расчетной схемы и принятых допущений разработана математическая модель автогрейдера, позволившая выявить функциональные зависимости его основных параметров.
Принятая в работе математическая модель реакции грунта на РО включает в себя компоненты вектора реакции грунта и стохастические составляющие, представленные корреляционными функциями.
Математическая модель системы управления автогрейдера отражает динамические свойства маятникового датчика, блока управления и исполнительного гидропривода.
Разработанная обобщенная структурная схема автоматизированного автогрейдера отражает наиболее общие свойства существующих и перспективных конструкций автогрейдеров и их систем управления. Она позволяет на ее основе решать задачи анализа и синтеза систем управления автогрейдером.
4. Выявление основных закономерностей системы управления РО автогрейдера
Исследования проводились на математических моделях микрорельефа грунта, автогрейдера, системы управления рабочим органом. Для реализации численных значений вертикальных координат анализируемого микрорельефа с заданными параметрами корреляционной функции использовалась программа SOIL, блок-схема которой представлена на рис. 3.1. Входными параметрами этой программы являются коэффициенты затухания a к и периодичности b к корреляционной функции, среднеквадратичное отклонение s микрорельефа моделируемого грунта, шаг h дискретности времени, интервал усреднения МС и число точек N сглаженного профиля, а выходными параметрами вертикальные координаты микрорельефа грунта по правой и левой колее движения автогрейдера. Для описания автогрейдера использовалась программа GRADER реализующая обобщенную динамическую модель автоматизированного автогрейдера структурная схема которой, представлена на рис. 3.14. Она включает в себя уравнения геометрической связи автогрейдера с учетом динамических колебаний, сопротивление копанию и модель системы стабилизации РО. Выходными параметрами являются вертикальные координаты центральной точки режущей кромки РО y, крайних точек режущей кромки РО yП и yЛ, что фактически является вертикальными координатами формируемого микрорельефа. Статистическая обработка данных проводилась с помощью подпрограммы SKO, вычисляющей среднеквадратичное отклонение данных от заданного значения.
Размеры автогрейдера принимались фиксированными и соответствующими табл. 4.1.
Таблица 4.1. Численные значения параметров автогрейдера при экспериментах
| № п/п | Параметр | Численные значения | Единицы измерения |
| 1 | L2 | 2.45 | м |
| 2 | Lxp | 4.95 | м |
| 3 | Lp | 1.85 | м |
| 4 | L4 | 1.85 | м |
| 5 | Lт | 3.34 | м |
| 6 | Lот | 4.80 | м |
4.1 Погрешности показаний датчика системы стабилизации отвала автогрейдера в поперечной плоскости от места установки датчика и угла захвата рабочего органа
Основным источником информации ССО автогрейдера в поперечной плоскости является маятниковый датчик, установленный на автогрейдере. В большинстве серийно выпускаемых ССО маятниковый датчик устанавливается на тяговой раме или отвале автогрейдера. Известны исследования, в которых с различных позиций, в зависимости от поставленных в работе задач, проанализированы места установки маятниковых датчиков, их статические и динамические погрешности, доказана необходимость коррекции показаний датчика, установленного на отвале, в зависимости от положения тяговой рамы и угла захвата РО. Однако, в предшествующих исследованиях отсутствует анализ величины погрешности маятникового датчика в зависимости от места его установки и не показаны пути достижения более достоверной оперативной информации о фактическом поперечном уклоне формируемого земляного полотна.
Для решения поставленных в работе задач на основе предложенной математической модели автогрейдера были проведены исследования погрешности показаний маятникового датчика, зависящие от места установки датчика и угла захвата РО. Исследования проводились на математической модели автогрейдера, в которой была отключена ССО. Под правое переднее колесо автогрейдера с вертикальной координатой Y1п подавалось единичное ступенчатое воздействие, равное 0,1 м. РО не вынесен в сторону. РО формирует профиль по всей колее. «Реальным профилем» в момент времени t считался уклон gреал поперечного сечения сформированного полотна, проходящего через точку, максимально приближенную к задним колесам автогрейдера.
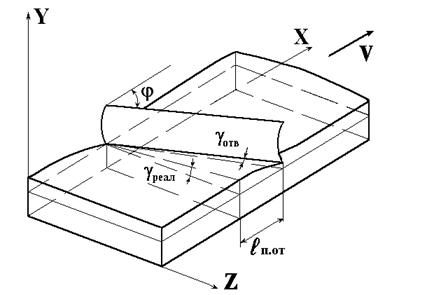
Рис. 4.1. Поперечный угол наклона gреал «реального» профиля
На рис. 4.2–4.16 в качестве примера приведены переходные процессы перемещения характерных точек автогрейдера таких, как средняя точка отвала Y и крайние точки отвала Yл и Yп, а также угол поперечного уклона сформированного земляного полотна и показания «идеального» датчика при различных углах захвата РО j, в различных местах установки датчика. При этом скорость автогрейдера была фиксирована и составляла V=1 м 53,691818 с.
На рис. 4. 18,4.19 в качестве примера приведены функциональные зависимости, построенные для численных значений корреляционных функций, приведенных в табл. 4.2.
Таблица 4.2. Численные значения параметров корреляционных функций микрорельефа
| № | Анализируемый | Численные значения | ||
| п/п | параметр | aк, с-1 | bк, с-1 | sк, 10-2 м |
| 1 | aк | 0,05–1,00 | 1,35 | 5,0 |
| 2 | bк | 0,77 | 0,1–2,0 | 5,0 |
| 3 | sк | 0,77 | 1,35 | 1–20 |
Из рис. 4.18 видно, что для принятых интервалов параметров коэффициент KY практически не зависит от численных значений параметров апроксимирующей корреляционной функции микропрофиля.
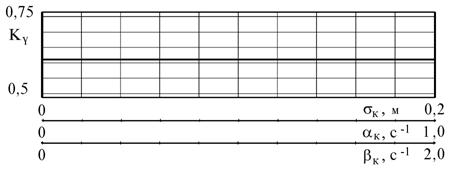
Рис. 4.18. Зависимости KY от параметров корреляционных функций микропрофиля sк, aк и bк.
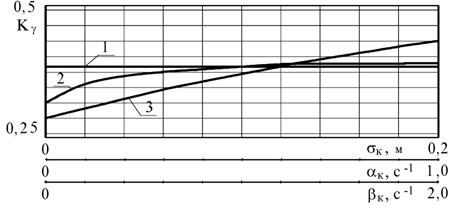
Рис. 4.19. Зависимости Kg от параметров корреляционных функций микропрофиля: 1 – то sк; 2 – от aк; 3 – от bк.
Коэффициент Kg также практически не зависит от численных значений sк. На рис. 4. 19,2 в качестве примера представлена зависимость Kg от aк. Функциональная зависимость Kg от коэффициента bк представлена на рис. 4. 19,3, она имеет вид линии близкой к прямой и отражает прямопропорциональную зависимость.
Исходя из выше сказанного можно сделать вывод, что планирующие свойства автогрейдера в продольной плоскости не зависят от параметров корреляционных функций, описывающих микрорельеф обрабатываемой поверхности. В поперечной плоскости планирующие свойства автогрейдера при j ¹ 90° существенно зависят от коэффициентов aк и bк. Причем, с их увеличением Kg увеличивается при прочих равных условиях. Это объясняется тем, что при j ¹ 90° вертикальное перемещение режущей кромки отвала формирует «косую ступень» в обрабатываемом грунте, которая в свою очередь при наезде на нее задних колес приводит к перекосу автогрейдера.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
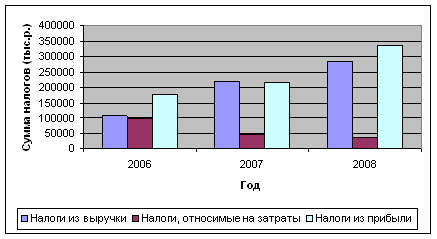
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
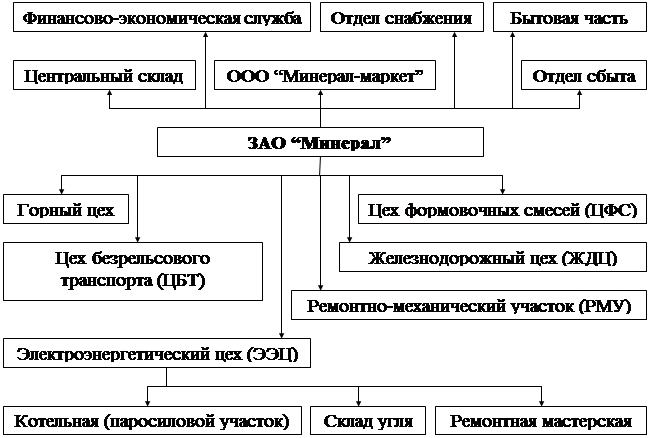
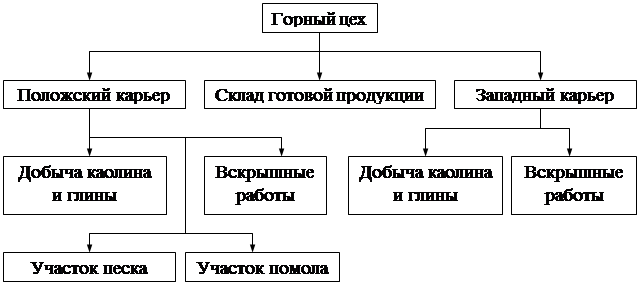
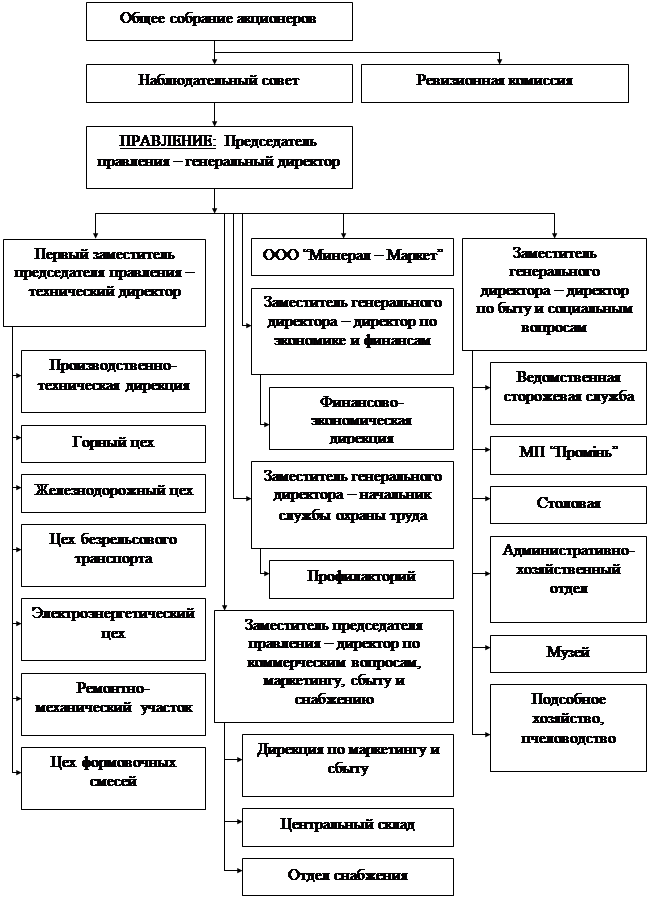
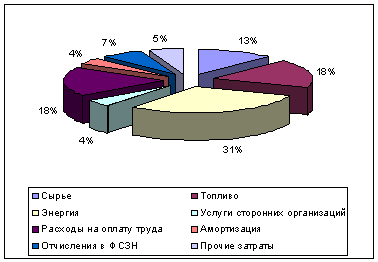
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев