Анализ предшествующих исследований
Анализ математических моделей микрорельефа грунта
Анализ математических моделей систем управления
Анализ предшествующих исследований проблемы повышения точности планировочных работ, выполняемых автогрейдером
Обзор существующих теорий копания грунта
Цели и задачи исследования
Методика теоретических исследований
Математическая модель автогрейдера
Обобщенная математическая модель автоматизированного автогрейдера
Влияние угла захвата РО автогрейдера на планировочные свойства
Обоснование структуры и алгоритмов функционирования перспективной ССО
Варианты перспективных ССО
Оценка адекватности математической модели автогрейдера
Навигация
Анализ предшествующих исследований
Повышение производительности автогрейдера, выполняющего планировочные работы, совершенствование системы управления
90874
знака
10
таблиц
32
изображения
1.2 Анализ предшествующих исследований
1.2.1 Анализ математических моделей автогрейдеров
Автогрейдерам и системам управления рабочим оборудованием автогрейдеров посвящено значительное число исследований. Был разработан ряд математических моделей автогрейдеров, снабженных автоматической системой стабилизации положения рабочего органа. Так как эти математические модели разработаны в разное время, для различных конкретных задач, они отличаются степенью детализации.
В работах В.С. Дектярева и А.М. Васьковского рассматривается автогрейдер, снабженный электрогидравлической системой стабилизации угла наклона отвала в поперечной плоскости. Расчетная схема автогрейдера выполнена в виде одномассовой системы на упругих опорах, математическое описание представлено дифференциальным уравнением второго порядка.
Для математического описания автогрейдер может быть представлен механической системой в виде шарнирно сочлененного многозвенника с голономными связями. В работах В.А. Палеева, В.А. Байкалова, В.Е. Калугина и А.Ф. Бакалова предложены обобщенные расчетные схемы автогрейдера, представленные пятизвенной системой с 13-ю степенями свободы и наложенными на нее упруговязкими связями. В зависимости от конкретных задач исследований математические модели различаются наличием дополнительных элементов и связей. В качестве элементов расчетной схемы выбраны: подмоторная рама, хребтовая балка, левый и правый балансиры, передняя ось и тяговая рама с рабочим органом. Математическая модель автогрейдера описывается системой уравнений Лагранжа второго рода. Для решения задач исследования пространственных кинематических цепей, которыми представлен автогрейдер, используется метод переходных матриц. Суть метода состоит в том, что задаются неподвижная система координат, связанная с неподвижным звеном или звеном, движущимся равномерно и прямолинейно, и локальные системы координат, жестко связанные с подвижными звеньями. В работах получены уравнения геометрической связи, определяющие положение произвольной точки локальной системы отсчета относительно однородной, связи между контролируемыми параметрами земляного полотна и значениями обобщенных координат автогрейдера, колебаний автогрейдера и др.
В работах В.В. Беляева, В.В. Привалова для описания перемещений элементов расчетной схемы была принята правая ортогональная система координат. Пространственное положение отвала характеризуют вертикальная координата его центральной точки и угол перекоса. Выведены уравнения кинематических связей, определяющих положение произвольных точек звеньев расчетной схемы в неподвижной системе координат в любой момент времени от начала отсчета и устанавливающих связь между положением рабочего органа и параметрами сформированной поверхности.
В работе В.А. Калякина предложена математическая модель планировочной машины на базе промышленных тракторов. Проведен анализ конструкций планировочных машин на базе различных промышленных тракторов.
В работе Б.Д. Каноныхина в соответствии с методом структурно-кинематического объединения типовых агрегатных подсистем были получены динамические модели колеса, балансирной тележки, остова, структурно-кинематические связи продольного и поперечного движений. На основании динамических моделей агрегатных подсистем синтезируется динамическая модель всей системы в целом: продольного и поперечного движения.
1.2.2 Анализ математических моделей гидроприводов
Решение задач анализа и синтеза гидроприводов невозможно осуществлять без их математических моделей, которые необходимо составлять для каждой новой гидравлической схемы. Разнообразные схемы гидроприводов представляют совокупность соединенных между собой гидроэлементов, причем количество функциональных элементов гидросистем невелико: насос, гидромотор, гидроцилиндр, гидролиния, дроссель, редукционный, предохранительный и обратный клапаны и др. Указанные гидроэлементы достаточно глубоко изучены и в зависимости от принятых допущений и поставленных задач исследования описаны с той или иной степенью детализации.
В работе Бирюкова С.Т. предлагается методика составления математических моделей гидроприводов, базирующаяся на представлении гидроэлементов в виде многомерных динамических объектов и использующая векторно-матричную форму записи уравнений.
Динамические свойства многомерных объектов полностью характеризуются их уравнениями движения, связывающими выходные и входные величины объектов, которые составляются на основе законов физики при рассмотрении процессов преобразования и передачи информации. Линеаризованная математическая модель гидравлического многомерного объекта может рассматриваться как гидравлический многополюсник. Гидропривод в целом можно рассматривать как сложный ГМП, состоящий из соединенных между собой различными способами простых ГМП.
Представление математических моделей гидроприводов в виде ГМП позволяет формализовать процесс составления математических моделей и возложить его на ЭВМ. При этом, в зависимости от целей и задач исследования, могут быть сформированы математические модели двух типов: модели, которые устанавливают аналитическую взаимосвязь между внешними воздействиями и выходными величинами без рассмотрения величин векторов, связывающих ГМП между собой, и модели, устанавливающие аналитическую взаимосвязь между векторами гидросистемы.
В работе Бакалова А.Ф. отмечается, что для решения задач динамики гидрофицированной машины в целом, когда наибольший интерес представляет движение выходного звена исполнительного электрогидропривода при подаче на вход управляющего воздействия, то есть «макродинамика» гидропривода, его математическое описание может быть значительно упрощено. При этом не будут рассматриваться процессы, связанные с работой отдельных гидроэлементов.
При описании электрогидропривода в качестве входного воздействия принята выходная координата порогового элемента, в качестве выходной координаты – перемещение штока гидроцилиндра.
В своей работе Беляев В.В. предложил общую передаточную функцию гидропривода. Так как объемный гидропривод обладает такими общими свойствами, как время запаздывания и постоянная скорость перемещения штоков исполнительных гидроцилиндров в установившемся режиме, переходные процессы разгона и торможения штока гидроцилиндра, то можно выделить следующие характерные стадии переходного процесса:
1) чистое запаздывание tгид, в течение которого шток находится в покое после включения распределителя;
2) стадию разгона, в течение которой шток разгоняется до номинальной скорости;
3) стадию установившегося движения.
Выделенным стадиям можно поставить в соответствие три последовательно соединенных звена – звено чистого запаздывания, апериодическое звено первого порядка и интегрирующее звено.
Математическое описание звена чистого запаздывания имеет вид:
Qг = Rг,
где Rг, Qг – входной и выходной сигналы звена чистого запаздывания.
Передаточная функция такого звена определяется по преобразованию Лапласа, и имеет вид:
.
Свойства апериодического звена первого порядка определяются постоянной времени tр, характеризующей его инерционность, и коэффициентом передачи Kи.
С учетом того, что Kи=1, передаточная функция имеет вид:
.
Передаточная функция интегрирующего звена
,
где K – коэффициент, определяющий скорость штока гидроцилиндра в установившемся режиме.
Общую передаточную функцию гидропривода можно записать:
.
Анализ предшествующих исследований, посвященный математическому описанию гидропривода, позволяет сделать вывод, что элементы гидропривода достаточно хорошо изучены и для достижения поставленной в работе цели могут быть представлены в виде передаточных функций.
Похожие работы

... различных конструктивных особенностей, точности и назначений. Высокоэффективный компьютерный тахеометр «Geodimeter AT-MC» (рис. 14) специально разработан для автоматического управления работой дорожно-строительных машин и механизмов (бульдозеров, автогрейдеров, асфальтоукладчиков и т.д.). Технические характеристики компьютерного тахеометра: Средняя квадратическая погрешность измерения углов: · ...
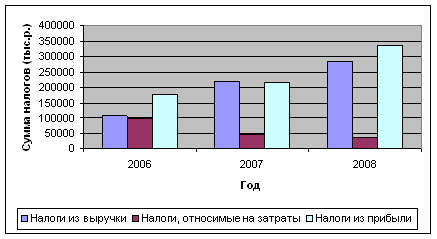
... предусмотрены Законом о республиканском бюджете в сумме 2689432779 тыс. р. и расходы в сумме 3222042888 тыс. р. 2.3 Практика налогообложения инновационной деятельности в Республике Беларусь На примере четырех предприятий Железнодорожного района г. Витебска разных форм собственности и осуществляющих различные виды деятельности, рассмотрим порядок налогообложения инновационной деятельности. ...
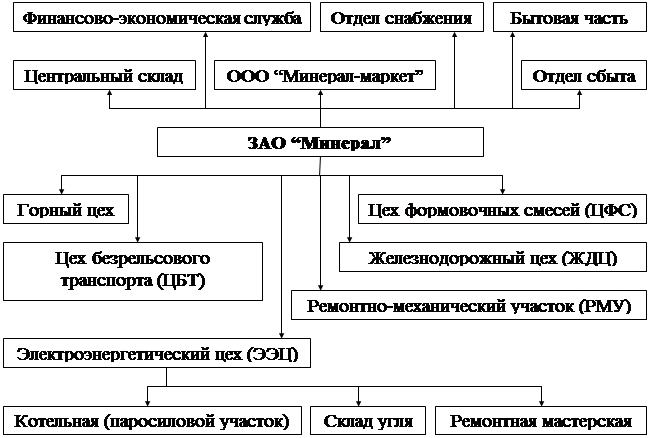
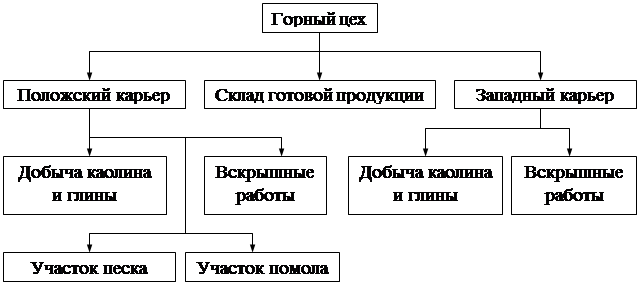
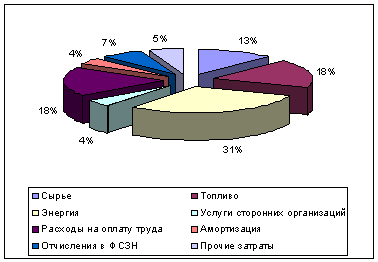
... на дизельное топливо; вследствие повышения активности деятельности предприятия в данное время возрастают затраты на ремонт. Раздел II. Система внутрипроизводственных экономических отношений. Характеристика существующей системы. С 1 января 2000 года ЗАО “Минерал” работает по принципу внутризаводского хозрасчёта, который в настоящее время основывается на следующих принципах: – оперативно- ...
... работ по устройству земляного полотна необходимо соблюдать правила техники безопасности, приведенные в соответствующих разделах и «Правил техники безопасности при строительстве, ремонте и содержании автомобильных дорог» и СНиП III-4-80 «Техника безопасности в строительстве». Постоянно следить за дислокацией дорожных знаков согласно согласованной с ГИБДД схеме. Общая длина захватки (участка), ...
0 комментариев