Расчётно-конструкторская часть
Рассчитаем положение нейтрали
Расчёт напряжений, возникающих при ударе бойка по наковальне и жёсткости амортизирующей пружины
Расчёт трансформатора с выпрямителем
Расчёт прерывателя – формирователя импульсов
Технологическая часть
Расчёт капитальных затрат при производстве устройства
Руб
Маркетинговые исследования
Экологичность устройства для обработки биологических тканей
Навигация
Проектирование трепанатора
Проектирование трепанатора
53562
знака
7
таблиц
16
изображений
1. Теоретическая часть
1.1 Описание устройства для обработки биологических тканей
На рис. 1 изображено устройство в собранном виде без рабочего инструмента. Устройство содержит: инструментальный фиксатор 1 с прижимными винтами 2, герметизирующую трубку гофр 3, соединяющую инструментальный фиксатор 1 и корпус прибора, подшипники скольжения 4, наковальню 5, установленную на штоке 6, соединенным с инструментальным фиксатором 1. Под наковальней расположена амортизирующая пружина 7, исключающая передачу удара на корпус прибора в конце рабочего хода наковальни 5, наковальня расперта относительно корпуса распорной пружиной 8, жесткость пружины выбирается равной жесткости контакта «инструмент-ткань», боек 9 жестко связанный с сердечником 10, установленным в подшипники скольжения 11, части магнитопровода 12, стальной трубчатый корпус 13, намагничивающую катушку 14, возвратную пружину 15, жесткость пружины 15 выбирается из условия возврата сердечника с бойком в исходное положение и максимальной частоты колебаний, герметизирующую втулку 16, питающий кабель 17, связывающий намагничивающую катушку с блоком питания, крышку 18, фланец выполненный из немагнитного материала (алюминия) 20.
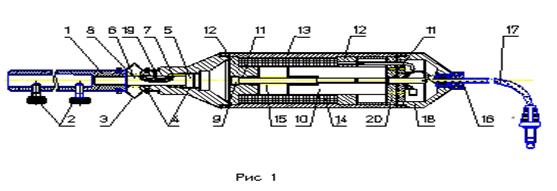
Устройство работает следующим образом: Трепанатор и сменные рабочие инструменты (долота, держатели штифтов) дезинфицируют в спецрастворах и сухожаровом шкафу. Хирург кнопками блока питания устанавливает нужную частоту и силу ударов, закрепляет в инструментальном фиксаторе 1 требуемый инструмент с помощью прижимных винтов 2. При нажатии на педаль управления на катушку ЛЕМД 14 с блока питания через питающий кабель 17 начинают поступать прямоугольные импульсы с заданной частотой и амплитудой. Под действием импульса сердечник 10 втягивается в магнитопровод, состоящий из частей 12,13, т.е. разгоняется в течение рабочего хода, затем ударяет бойком 9 по наковальне 5, передавая импульс удара на режущую кромку долота и перемещая наковальню 5 с инструментальным фиксатором 1 на минимальную величину рабочего хода, после чего сердечник 10 с бойком 9 возвращается в исходное положение возвратной пружиной 15, далее рабочий цикл повторяется. Подшипники скольжения 11, обеспечивают возможность перемещения сердечника 10 с бойком 9 относительно корпуса в осевом направлении. Подшипники скольжения 4 позволяют перемещаться штоку 6 с наковальней 5 в осевом направлении, винт 19 выполняет функцию направляющего штифта и исключает возможность проворота наковальни 5 с инструментальным фиксатором 1 в радиальном направлении. Трубка гофр 3 герметизирует подвижное соединение «корпус – инструментальный фиксатор». Герметизирующая втулка 16 обеспечивает герметичность соединения питающего кабеля 17 с крышкой корпуса 18.
При необходимости более быстрого удаления костного материала, хирург нажимает на корпус прибора, т.е. прикладывает большее усилие вдоль оси долота, под действием этого усилия наковальня 5 с долотом отводится на большую величину рабочего хода, преодолевая сопротивление распорной пружины 8, и при следующем ударе бойка возвращается в исходное положение, т.е. амплитуда колебаний долота возрастает. Это совместно с увеличением усилия резания позволяет повысить производительность операции при удалении сравнительно больших объемов кости.
При соскальзывании долота с кости в мягкие ткани, амплитуда колебаний немедленно уменьшается до несущественной величины, так как осевое усилие в этом случае минимально, а энергия удара гасится амортизирующей пружиной 7. Это снижает травматизм при операции.
Таким образом, предлагаемое устройство позволяет оптимизировать процесс операции. Это соответствует развитию прогрессивных щадящих принципов операционного вмешательства, особенно важных, например, при выполнении операций на среднем ухе, в условиях глубоких и узких полостей. При этих операциях необходимо точно дозировать силу удара, чтобы избежать повреждений.
1.2 Вывод уравнения динамики линейного электромагнитного двигателя
Расчет динамических характеристик линейных электромагнитных двигателей (ЛЭМД) представляет сложную задачу, так как требует учета таких факторов, как насыщение стали, вихревые токи, паразитные зазоры, противодействующие силы.
К динамическим характеристикам относятся: зависимость от времени тока обмотки, потокосцепление, индукции в сердечнике якоря, тяговое усилие, величины хода якоря, скорости и ускорение его движения. В общем случае процессы, протекающие в ЛЭМД, описываются системой нелинейных дифференциальных уравнений:
1. Для электрической цепи:
Е=i·R+dYa/dta, (1.3.1)
где: E – ЭДС источника питания;
R – сопротивление обмотки;
i – ток;
Y – потокосцепление;
t – время.
Уравнение механического равновесия:
| |
где ha- глубина внедрения якоря в обмотку;
Fea – тяговое усилие ЛЭМД;
Fna – сила возвратной пружины;
Fta – сила трения, знак которой зависит от направления движения якоря;
ma – масса подвижных частей,
![]()
где ![]() масса якоря;
масса якоря;
![]() подвижная масса оснастки;
подвижная масса оснастки;
g – ускорение силы тяжести;
a – угол наклона оси трепанатора;
Fpga – внешняя противодействующая сила.
Эти уравнения записаны в абсолютных величинах. Преобразуем уравнения (1.3.1) и (1.3.2), записав их в виде функций относительных геометрических размеров и параметром ЛЭМД. По определению, удельная магнито-движущая сила обмотки:
![]() ,
,
ток, протекающий в обмотке:
 .
.
Сопротивление обмотки:
R=r*lnp*Spr,
где lnpи Spr- длина и сечение провода;
r – удельное сопротивление провода обмотки.
![]() ,
,
где r0 – удельное сопротивление при 00С;
ar – температурный коэффициент сопротивления;
Θос – температура окружающей среды;
![]() – превышение температуры обмотки над Θос..
– превышение температуры обмотки над Θос..
Длина провода определяется по формуле:
![]() .
.
Сечение провода:
![]() ,
,
где kz – коэффициент заполнения обмотки;
r1а – внутренний радиус обмотки;
r2а – наружный радиус обмотки.
Следовательно, формула для R записывается:
 ,
,
Ускорение движения якоря, запишем как вторую производную от относительной глубины внедрения якоря в обмотку (ha).
![]()
где t, tb– относительное и базисное значение времени,
h – относительная глубина внедрения якоря в обмотку.
Масса подвижных частей ЛЭМД:
![]()
![]()
где lb- приведенная длина якоря в относительных величинах;
g – плотность материала якоря.
Силу трения, возникающую между направляющим стержнем и фланцем, в следствие одностороннего магнитного притяжения якоря к магнитным частям ЛЭМД, величина которого зависит от величины зазора между направляющим стержнем якоря, стопором и фланцем определяется по формуле [2]:
![]() ,
,
где Ктр – коэффициент трения;
![]() - величина эксцентриситета якоря;
- величина эксцентриситета якоря;
Вс – величина магнитной индукции;
rс – радиус стержня;
hp – толщина фланца;
l1 – высота стола;
Δ – величина нерабочего зазора;
Fb – базисная сила, которая определяется по формуле:
![]()
![]() ,
,
Сила возвратной пружины:
![]() ,
,
где кnp – коэффициент жесткости пружины;
h0a – начальная глубина внедрения якоря в обмотку;
F0a – сила начального сжатия.
Начальное сжатие обусловлено массой подвижных частей, следовательно:
![]() ,
,
![]() ,
,
Учитывая базисное значение или Fb, в обобщенной форме получим:
![]() ,
,
Внешняя противодействующая сила:
![]() ,
,
Подставляя полученные формулы в уравнение (1.3.1) и (1.3.2), получим систему нелинейных дифференциальных уравнений третьего порядка относительно функций В, h, dh/dt, для ЛЭМД в обобщенной форме, которые позволяют определить любые динамические параметры ЛЭМД.
![]()
![]() E¢=p1* f+p2*(dy/dt),
E¢=p1* f+p2*(dy/dt),![]()
 ,
,
где ![]()
![]() p1=
p1= ,
,
p2= , где Fcи f – статические функции.
, где Fcи f – статические функции.
0 комментариев