Навигация
Анализ зубчатого механизма
27424
знака
8
таблиц
3
изображения
2.2 Анализ зубчатого механизма
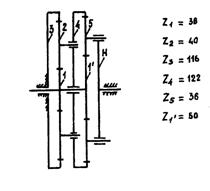
Для определения передаточного отношения графическим методом изображаем заданный механизм в масштабе, приняв произвольное значение модуля (m = 10). Обозначим на механизме все характерные точки – полюса зацеплений и центры колес. Проводим линию, перпендикулярную осям вращения колес и на нее проецируем все характерные точки. Так как ведущим звеном является колесо 1, то изображаем линейную скорость его конца (точка А) вектором Аа произвольной длины. Соединив точки а и О1, получаем линию распределения линейных скоростей колеса 1. Соединяем точку В с точкой а, и на продолжении этой линии проецируем точку О2, получим линию распределения линейных скоростей колеса 2. Соединив точки О2, О4 получим линию распределениялинейных скоростей колеса 4. На продолжении линии Аа проецируем точку А/. Соединяем точку а/ с точкой с получим линию распределения колеса 5. На эту линию проецируем точку О5. Соединяем точку О5 с точкой ОН, получим линию распределения для конечного звена – водила.
Передаточное отношение определится через отрезки SH и S1
i1Н = S1/SН = 190/83 = 2.29
Так как отрезки SH и S1 находятся по одну сторону от SP, передаточное отношение получается со знаком плюс.
Имеем дифференциальный механизм
![]() Di =
Di =  ×100% = 3.9 %
×100% = 3.9 %
2.3 Проверка выполнения условий соосности, соседства и сборки планетарного механизма
Условие соосности представляет равенство межцентровых расстояний пар зубчатых колес
r1 + r2 = r3 – r2 или z1 + z2 = z3 – z2
36 + 40 = 116 – 40 76 = 76
Условие соосности выполняется.
Условие соседства определяет возможность размещения всех сателлитов по окружности их центров без задевания друг за друга.
sin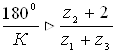
где К – число сателлитов
При К= 2 sin![]() >0.28
>0.28
Условие соседства выполняется.
Условие сборки определяет возможность одновременного зацепления всех сателлитов с центральным колесом. Это значит, что сумма чисел зубьев центральных колес будет кратной числу сателлитов.
![]()
где С – любое целое положительное число.
![]()
Условие сборки выполняется.
Таким образом, планетарная часть заданного зубчатого механизма удовлетворяет всем требованиям проектирования.
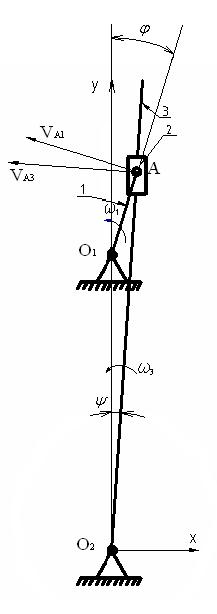
3 Силовой расчет рычажного механизма
Вариант 20
Исходные данные:
| LOA= 0.2 LAB= 0.6 LBC= 0.5LСD= 0.2 LDE= 0.7 | LAS2= 0.2 LCS3= 0.1 LDS4= 0.3 XC=-0.22 YС=-0.45 | m2= 60 m3= 50 m4= 50 m5=140 XЕ=-0.7 | Pnc= -2Pj5 JS2= 0.1 JS3= 0.06 JS4= 0.12 w1= 60π, |
где li – длины звеньев и расстояния до центров масс звеньев от их начальных шарниров, м;
Jsi – моменты инерции звеньев, кгм2;
mi – массы звеньев, кг;
w1 – угловая скорость ведущего звена, с-1;
Pnc - сила полезного сопротивления, приложенная к ползуну 5, Н;
Pj5 – сила инерции 5 звена, Н.
Требуется определить уравновешивающую силу методом выделения структурных групп и методом жесткого рычага Н.Е.Жуковского, давление во всех кинематических парах.
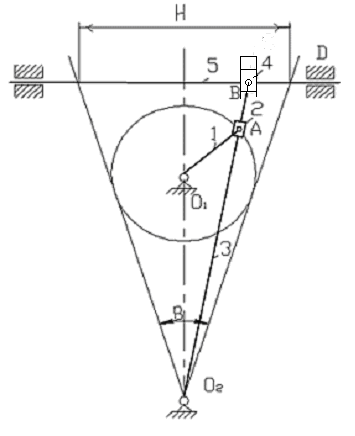
Вычерчиваем план механизма в масштабе ml
ml= lOA/OA = 0.2/40 = 0.005 м/мм.
Строим план скоростей, повернутый на 90° в масштабеmv= VA/Pa = w1×lOA/Pa = 60×3.14×0.2/94.2 = 0.4 м/с/мм.
Скорость точки В определится в результате решения двух векторных уравнений
VB = VA+VBA, VB = VC+VBC.
Точку d на плане скоростей определяем по теореме подобия
BC/DC = Pb/Pdma= aA/pa=w12×lOA/pa = (60×3.14)2×0.2/101.4 = 70 м/с2/мм.
Ускорение точки В определяется относительно точек А и СaB = aA+ anBA+ atBA, aB = aC + anCB + atCB,
anBA = w22×lAB = (ab×mv / lAB)2× lAB = (84×0.4/0.6)2× 0.6 = 1881.6 м/с2
anBC = w32×lBC = (Pb×mv / lBC)2× lBC = (64×0.4/0.5)2× 0.5 = 1310.7 м/с2
Длины отрезков, изображающих нормальные составляющие ускорений
anBA и anBC на плане ускорений, определяется с учетом масштаба ma
anBA= anBA/ma = 1881.6/70 = 26.9 мм
pnBC= anBC/ma = 1310.7/70 = 18.7 мм
Положение точки d на плане ускорений определяем по теореме подобия
BC/DC = πb/πdДлина отрезка на плане ускорений
dnED= anED/ma = 44.8/70 = 0.64 мм
Положение точек S2, S3, S4 на плане ускорений определяем по теореме подобия из соотношений
АB/АS2 = ab/aS2 Þ aS2 = ab×AS2/AB = 45×40/120 = 15 мм
BC/CS3 = pb/pS3 Þ pS3 = pb×CS3/BC = 58×20/100 = 11.6 мм
DE/DS4 = de/dS4 Þ ds4 = de×DS4/DE = 19×60/140 = 8.14 мм
Определение сил инерции звеньев
При определении сил инерции и моментов учитываем, что план ускорений построен повернутым на 180°, поэтому знак минус в расчетах опускаем.
Pj2 = m2×as2 = m2×ps2×ma = 60×86×70 = 361200 H
Mj2 = Js2×e2 = Js2×atBA/lAB = Js2×nBAb×ma/lAB = 0.1×39×70/0.6 = 455 H×м
Pj3 = m3×as3 = m3×ps3×ma = 50×12×70 = 42000 H
Mj3 = Js3×e3 = Js3×atBA/lBС = Js3×nBСb×ma/lBС= 0.06×55×70/0.5 = 462 H×м
Pj4 = m4×as4 = m4×ps4×ma = 50×21×70 = 73500 H
Mj4= Js4×e4 = Js4×atED/lDE = Js4×nEDe×ma/lDE = 0.12×19×70/0.7 = 228 H×м
Pj5 = m5×aE = m5×pe×ma = 140×22×70 = 215600 H
Сила полезного сопротивления, приложенная к рабочему звену (5)
Pnc = -2 Pj5 = - 431200 H
Результирующая в точке Е R5 = Pj5 + Pnc = -215600 H Наносим на план механизма вычисленные силы и моменты. В точки S2, S3, S4 прикладываем силы инерции, а в точки А и Е, соответственно, уравновешивающую – Рyи результирующую – R5 силы.Под действием приложенных сил механизм находится в равновесии. Выделяем первую структурную группу (звенья 4,5) и рассматриваем ее равновесие. В точках D и E для равновесия структурной группы прикладываем реакции R34 и R05 .
Составляем уравнение равновесия
SMD = 0 , Pj4×h4 µl + R5×h5 µl + R05×h05 µl - Mj4 = 0
R05 = (-Pj4×h4 µl - R5×h5 µl + Mj4)/h05 µl = (-73500×2∙0.005- 215600×62∙0.005 + 228)/126∙ 0.005 = -106893.6 Н
SPi = 0 . Pj4 + R5 + R05+R34= 0 . Принимаем масштаб плана силmp1 = Pj4/zj4 = 73500/50=1470 H/мм
В этом масштабе строим силовой многоугольник, из которого находимR34 = z34×mp1 = 112×1470=164640 H
Выделяем и рассматриваем равновесие второй структурной группы (звенья 2,3). Для ее равновесия прикладываем:
в точке D – реакцию R43 = - R34 ;
в точке А – реакцию R12 ;
в точке С – реакцию R03 .
Составляем уравнения равновесия
SМВ2 = 0 , Pj2×h2 µl - Rt12×AB×µl + Mj2 = 0 ,
Rt12 = (Pj2×h2µl+ Mj2 )/AB×µl = (361200×50∙0.005 + 455)/120×0.005 = 151258.3 H
SМВ3 = 0 , Pj3×h3×µl+ Rt03×BC×µl +R43×h43 ×µl - Mj3 = 0
Rt03 = - Pj3×h3×µl-R43×h43 ×µl + Mj3/BC×µl,
Rt03 = - 42000×76×0.005-164640×31×0.005 + 462/100×0.005 = - 82034.4 Н SPi = 0, Rt12 + Pj2 + R43 + Pj3 + Rt03 + Rn03 + Rn12 = 0 . Принимаем масштаб плана сил для данной структурной группыmp2 = Pj2/zj2 = 361200/100 = 3612 H/мм
Из многоугольника сил определяем результирующую реакцию
R12 = Rn12 + Rt12 и ее величину
R12 = z12×mp2 = 79×3612 = 285348 H
Рассматриваем равновесие оставшегося механизма первого класса. В точке О стойку заменяем реакцией R01 произвольного направления.
Составляем уравнения равновесия
SМ0 = 0 , Py×OA - R21×h21 = 0 .
Уравновешивающая сила
Py = R21×h21/OA = 79935.9 H
SPi = 0 , Py + R21 + R01 = 0 .
Масштаб плана сил
mp3 = R21/z21 = 2850 H/мм
Из силового треугольника находим реакцию R01
R01 = z01×mp3 = 99×2850 = 282150 H
Определяем давление в кинематических парах.
Кинематическая пара В (звенья 2,3). Рассматриваем уравнение равновесия звена R12 + Pj2 + R32 = 0 .Для его решения используем план сил структурной группы (2,3). Замыкающий вектор z32 показан пунктиром.
R32 = z32×mp2 = 24×3612 = 86688 H Давление в кинематической паре Е (звенья 4,5) определится из решения векторного уравнения R5 + R05 + R45 = 0 R45 = z45×mp1 = 162×1470 = 238140 H Значения давлений во всех кинематических парах рассматриваемого механизма сводим в таблицу. Таблица 4 - Значения давлений в кинематических парах механизма| кинематические пары | 0 | А | В | С | Д | Е45 | Е05 |
| Обозначение | R01 | R12 | R32 | R03 | R34 | R45 | R05 |
| Значение , Н | 282150 | 285348 | 86688 | 122808 | 164640 | 238140 | 106893.6 |
Для определения уравновешивающей силы по методу Н.Е.Жуковского вычерчиваем план скоростей, повернутый на 90° в уменьшенном масштабе. На данном чертеже этот план скоростей совпадает с планом скоростей механизма. Используя теорему подобия, определяем на плане скоростей положения точек S2, S3, S4.
АS2/АВ = аk2/ab Þ as2 = ab×AS2/AB = 84×40/120 = 28 мм
CS3/CВ = Ps3/Pb Þ Ps3 = Pb×CS3/CB = 64×20/100 = 12.8 мм
DS4/DE = dk4/de Þ ds4 = de×DS4/DE = 14×60/140 = 6 мм
Считаем преобразованные моменты:
Mj2/ = Mj2×ab/lAB = 63700 H×мм
Mj3/ = Mj3×Pb/lBC = 59136 H×мм
Mj4/ = Mj4×de/lDE = 4560 H×мм
В соответствующие точки плана скоростей прикладываем все действующие на механизм силы, в том числе и уравновешивающую.
Составляем уравнение равновесия для жесткого рычага Жуковского и решаем его.
Py×Pa + Mj2/ - Mj3/ - Mj4/ - Pj2×hj2 - Pj3×hj3 + R5×Pe - Pj4×h4 = 0 ,Py= (Pj2×hj2 + Pj3×hj3 - R5×Pe + Pj4×h4 - Mj2/ + Mj3/ + Mj4/)/ Pa = 48163.8 H
Вычисляем относительную ошибку определения уравновешивающей силы двумя методами
DРу = [(Ру1 - Ру11)/ Ру1]×100% = |49935.9 – 48163.8/49935.9|×100% = 3.5 %
Ошибка не превышает 5% .
Похожие работы

... 7,41 11,96 12,6 Графические 2,5 ; Диаграммы скоростей и ускорений: Рис.4 - Диаграмма скоростей Рис.5 - Диаграмма ускорений 2. Силовой анализ рычажного механизма Исходные данные: Масса кулисы m3=20 кг; Масса ползуна m5=52 кг; Сила полезного сопротивления Qпс=1550 Н. Схема механизма (Рис.6). ...
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
... 1.4 Построение диаграммы перемещений выходного звена. Диаграмма перемещений выходного звена получается в результате построения отрезков, которые берутся с чертежа плоского рычажного механизма в 12 положениях с учётом масштабного коэффициента 1.5 Построение диаграммы скоростей выходного звена. Диаграмма скоростей выходного звена получается в результате графического дифференцирования ...
... 24 0,00 0,00 14,10 14,10 9,30 9,30 58,02 58,02 2.4 Исследование механизма методом кинематических диаграмм Исследование механизмов методом диаграмм производится с целями: 1. Получения наглядного представления о законе движения интересующей нас точки или звена механизма. 2. Определения скоростей и ускорений точек или звеньев на основе известного закона перемещений точек или ...
0 комментариев