Навигация
Содержание
Задание для курсового проектирования
Введение - цели и задачи курсового проектирования
1. Синтез и динамический анализ основного механизма
2. Силовой анализ рычажного механизма
3.Проектирование эвольвентного зубчатого зацепления
4. Синтез кулачкового механизма
Литература
Введение
Курсовой проект по дисциплине «Теория механизмов и машин» состоит из графической части и расчетно-пояснительной записки. Включает в себя четыре основных раздела:
1. Синтез и динамический анализ основного механизма.
2. Силовой анализ рычажного механизма.
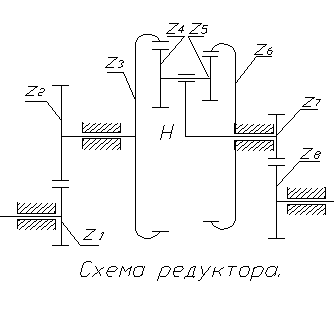
3. Проектирование эвольвентного зубчатого зацепления и синтез планетарного механизма.
4. Синтез кулачкового механизма.
В первом разделе курсового проекта выполняется проектирования основного рычажного механизма, рассчитывается момент инерции маховика и определяется истинный закон движения звена приведения.
Во втором разделе рассчитываются силы и моменты инерции, приложенные к звеньям, определяются неизвестные реакции в кинематических парах и уравновешивающий момент.
В третьем разделе проводится расчет геометрических параметров, контрольных размеров, качественных и кинематических характеристик эвольвентного зубчатого зацепления. Проводится оценка спроектированной передачи по всем вышеизложенным параметрам. Исходные данные выбираются в соответствии с рекомендациями ГОСТ 16532-70. Здесь же выполняется синтез планетарного механизма.
В четвертом разделе проекта определяются основные параметры кулачкового механизма, и строится профиль кулачка, обеспечивающий заданный закон движения толкателя.
Графическая часть проекта выполняется на четырех листах формата А1 по разделам в соответствии с ГОСТ 2304-68 и ГОСТ 2302-68.
РАЗДЕЛ I
Синтез и динамический анализ основного механизма.
Целью данного раздела является проектирование основного кривошипно-шатунного механизма, определение длин его звеньев, расчет момента инерции маховика, определение истинного закона движения звена приведения.
1.1. По формуле Чебышева определим степень подвижности механизма:
![]()
Согласно классификации Артоболевского механизм состоит из: механизма I класса - кривошип ОА, стойка О.
Структурная группа Ассура II класса, II порядка, II вида. - шатун АВ, ползун В; I(0;1) – II2 (2;3) – структурная форма механизма.
В целом механизм является механизмом II класса – по наивысшему.
1.2 По заданным исходным данным спроектируем основной кривошипно-шатунный механизм:
![]() м/с;
м/с;
n1 = ![]() об/мин;
об/мин;
![]()
Для этого необходимо определить размеры звеньев, найти положения центров тяжести.
1.2.1. Длину кривошипа lОА вычисляем по формуле:
![]() м
м
1.2.2. Определяем длину шатуна:
![]() м
м
1.2.3. Определяем масштаб построения:
 ,
,
где ОА – отрезок произвольно взятый на чертеже, мм.
Принимаем ![]()
![]()
![]()
1.2.4. Определяем длину шатуна:
![]() мм
мм
1.2.5.Определим положение центра масс шатуна:
![]() м
м
AS2 = ![]()
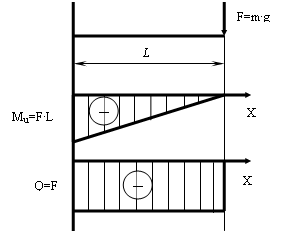
1.3 Вычерчиваем в масштабе диаграмму изменения давления, расположив ось абсцисс параллельно перемещению ползуна и разметив ее в соответствии с положениями, занимаемыми ползуном.
![]()
![]()
Рассчитываем значения силы Р для каждого положения поршня и заносим в таблицу 1. Для этого определим площадь сечения цилиндра:
![]() ;
;
![]() м2
м2
![]() Н
Н
| Положения | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Р, Н | 0 | 1592 | 960 | 17246 | 17246 | 3562 | 0 | 0 | 0 |
1.4 Строим планы скоростей для соответствующих положений механизма. На планах изображены векторы скоростей, центров масс и их проекции на направление сил тяжести.
Построение начинаем с входного звена, т.е. с кривошипа ОА. Из произвольно взятой точки Pv, являющейся полюсом плана скоростей, откладываем в направлении движении кривошипа вектор из Pv в точку А, выбранной произвольно.
Выбираем Pva= 100 мм.
Определяем положение центра масс шатуна
![]() м.
м.
Определяем отрезок на чертеже
![]() мм
мм
![]() мм,
мм,
где ab – отрезок с плана скоростей , мм.
1.5 Для каждого положения механизма вычислим приведенный момент сил сопротивления ![]() , который определяем по методике [1] стр. 8-9.
, который определяем по методике [1] стр. 8-9.
Используя формулу [1.4] и планы скоростей, определим момент сил для данного механизма.
 ;
;
Определим массы звеньев:
5![]() ,5кг
,5кг
![]() ,5кг;
,5кг;
![]() кг.
кг.
Рассчитываем силы тяжести:
![]() ;
;
![]() H
H
![]() H
H
![]() H
H
Определим моменты движущих сил для всех положений момента и заносим результаты в таблицу 2:
![]()
Таблица 2.
| Положение |
|
|
|
|
|
|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0,6 | -1 | 0,6 | -1 | 0,67 | -154 |
| 2 | 1 | -1 | 1 | -1 | 0 | -1202 |
| 3 | 0,85 | -1 | 0,85 | -1 | 0,75 | -2212 |
| 4 | 0 | 0 | 0 | 0 | 0 | 0 |
| 5 | 0,85 | -1 | 0,85 | -1 | 0,75 | 467 |
| 6 | 1 | -1 | 1 | -1 | 0 | 12 |
| 7 | 0,6 | -1 | 0,6 | -1 | 0,67 | 10,2 |
Строим диаграмму приведенных моментов сил сопротивления в зависимости от угла поворота звена приведения (кривая 1).
Вычисляем масштаб оси абсцисс ():
![]() рад/мм
рад/мм
Определяем масштаб диаграммы приведенных моментов сил сопротивления.
![]()
![]() , где
, где
![]() – значение из таблицы 2;
– значение из таблицы 2;
![]() – произвольно принимаем 100 мм.
– произвольно принимаем 100 мм.
![]()
![]()
1.6 Вычислим для полученных положений механизма, значения приведенных моментов инерции звеньев и строим диаграмму приведенного момента инерции всех звеньев ![]() в масштабе:
в масштабе:

![]() мм
мм
Приведенный момент инерции ![]() определим из условия равенства его кинетической энергии, суммарной энергии всех подвижных звеньев механизма по методике [1] стр. 9;10;12 используя формулы (17;18;19) можно записать формулу
определим из условия равенства его кинетической энергии, суммарной энергии всех подвижных звеньев механизма по методике [1] стр. 9;10;12 используя формулы (17;18;19) можно записать формулу ![]() для нашего случая:
для нашего случая:
 ;
;
Вычислим ![]() для всех положений и результаты заносим в таблицу 3:
для всех положений и результаты заносим в таблицу 3:

Приведенный момент инерции.
Таблица 3.
| Положение механизма |
|
|
|
|
|
|
кг·м2 |
| 0 | 0 | 0 | 0,67 | 0,4489 | 1 | 1 | 0,0567 |
| 1 | 0,6 | 0,36 | 0,82 | 0,6724 | 0,7 | 0,49 | 0,129 |
| 2 | 1 | 1 | 1 | 1 | 0 | 0 | 0,2475 |
| 3 | 0,85 | 0,7225 | 0,9 | 0,81 | 0,7 | 0,49 | 0,19 |
| 4 | 0 | 0 | 0,67 | 0,4489 | 1 | 1 | 0,0567 |
| 5 | 0,85 | 0,7225 | 0,9 | 0,81 | 0,7 | 0,49 | 0,19 |
| 6 | 1 | 1 | 1 | 1 | 0 | 0 | 0,2475 |
| 7 | 0,6 | 0,36 | 0,82 | 0,6724 | 0,7 | 0,49 | 0,129 |



1.7 Строим диаграмму избыточных работ ![]() путем интегрирования кривой
путем интегрирования кривой ![]() .
.
Масштаб оси ординат диаграммы ![]() вычисляем по формуле:
вычисляем по формуле:
![]() Дж/мм
Дж/мм
![]()
1.8 Строим диаграмму среднего приведенного момента на тех же осях и в том же масштабе ![]() .
.
Величину среднего приведенного момента можно определить графическим дифференцированием графика ![]() .
.
1.9 Используя уравнение ![]()
Строим диаграмму изменения запаса кинетической энергии ![]() .
.
Определим масштаб оси ординат этой диаграммы:
![]() ,
,
где
k – коэффициент пропорциональности, в нашем случае k=1;
![]() Дж/мм.
Дж/мм.
1.10 Определяем момент инерции дополнительной массы (маховика) обеспечивающий вращение ведущего звена с заданным коэффициентом неравномерности =1/55 и закон его движения.
Динамический синтез механизма проводим методом Виттенбауэра.
Метод Виттенбауэра.
Строим диаграмму «Энергия-масса» путем совместного графического решения двух графиков ![]() и
и ![]() , исключая параметр .
, исключая параметр .
Для удобства построения диаграммы ![]() повернем на угол 90°.
повернем на угол 90°.
На диаграмме ![]() и Е отмечаем соответственно точки 1' и проводим через них горизонтальную и вертикальную линии, на пересечении которой отмечаем точку 1, повторив процедуру получим остальные точки. Полученные точки соединяем плавной линией, строим диаграмму «Энергия-масса».
и Е отмечаем соответственно точки 1' и проводим через них горизонтальную и вертикальную линии, на пересечении которой отмечаем точку 1, повторив процедуру получим остальные точки. Полученные точки соединяем плавной линией, строим диаграмму «Энергия-масса».
1.11 Проведем под углами max и min касательные к кривой «Энергия-масса». Точки пересечения этих касательных с осью ординат обозначаем А и В. Значение tg этих углов вычислим по формулам:
![]()
![]() 1°27'
1°27'
![]()
![]() 1°24'
1°24'
![]() рад/сек
рад/сек
Похожие работы


... 9 -41 72,6 0,354 -2,5 2,01 -1,77 117,7 83,70 10 -71 81,3 0,301 -6,4 1,02 -4,6 97,2 75,17 11 -101 95,2 0,294 -7,8 -0,61 -5,1 -62,8 57,68 12 -131 105,8 0,337 -3,5 -1,84 -2,53 -124,76 89,04 2. Силовой расчёт. 2.1. Исходные данные: Усилие резани Рпс=130 кг. Веса звеньев G1=10 кг G2=2 кг. G3=16 кг. G4=2 кг. G5= 22 кг. Угловая скорость ...
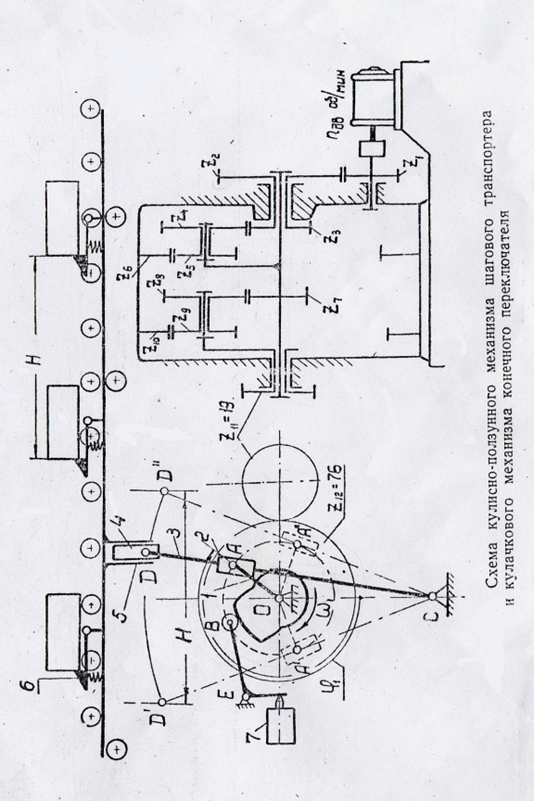
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... механизма, а так же технологическими и экономическими особенностями изготовления механизма, а так же условиями, в которых будет работать будущий механизм. Поэтому вопрос практического проектирования зубчатых передач является достаточно актуальным в современной радиоэлектронной промышленности. 2. Анализ технического задания Техническое задание представляет из себя задание на расчёт параметров ...
... е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения. Начинать силовой анализ необходимо с наиболее удаленной от ведущего звена структурной группы. 3.1 Определение реакций в кинематических парах структурных групп Чтобы определить величины и направления сил инерции, надо знать ускорения и массы звеньев. Ускорения ...
0 комментариев