Навигация
4 Расчет маховика
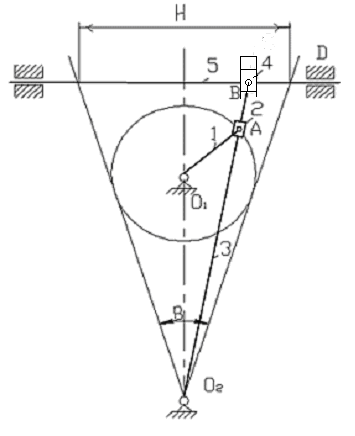
Исходные данные: схема механизма
 А
А
![]()
![]()
![]()
![]() В
В
![]()
![]()
![]() О
О
r = 0.3 м, l = 0.64 м, lAS2 = 0.22 м, w1 = 50 с-1, d = 0.12 м,
m2 = 2.4 кг, m3 = 1.9 кг, J01 = 0.012 кгм2, JS2 = 0.020 кгм2,
d = 0.23, Pimax = 300000 Па.
Требуется определить момент инерции маховика по методу избыточных работ рассчитать геометрические параметры маховика, его массу и вычертить эскиз. Определяем приведенный момент движущих силМпр = Рпр×lAO,
где Рпр = Рдв×(VВ/VА) – приведенная к точке А движущая сила
Рдв = Pi×p×d2/4,
VB = Pb×mV, VA = w1×lAO - линейные скорости точек В и А, м/с;
Рb - длина отрезка (мм) на плане скоростей, построенном в масштабе
mv = ml×w1;
Pi - индикаторное давление ( Па ), значения которого определяются для соответствующих положений поршня по индикаторной диаграмме;
d - диаметр поршня, м.
Определяем масштаб для построения плана механизма
ml = lOA/OA = 0.3/60 = 0,005 мм .
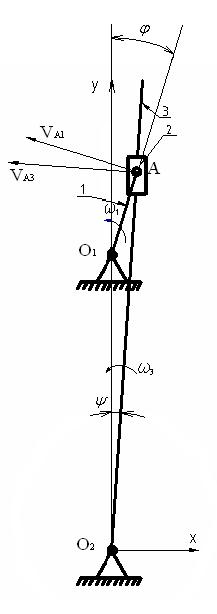
Для двенадцати положений (через 30° угла поворота кривошипа) строим повернутые на 90° планы скоростей в масштабе
mV = ml×w1 = 0.25 (м/с)/мм .
Строим индикаторную диаграмму и определяем её масштабmPi = pimax/ypimax = 300000/200 = 1500 Па/мм ,
где yмах - максимальная ордината индикаторной диаграммы, мм.
Проецируем диаграмму на ось абсцисс и получаем точки 1 – 7' . Из точки 1 под произвольным углом проводим прямую и откладываем на ней отрезок 1-7, равный ходу поршня (на плане механизма). Соединив точки 7 и 7, получаем масштабный треугольник, используя который, определяем значения индикаторного давления для различных положений угла поворота кривошипа.
Из плана механизма, повернутых планов скоростей и индикаторной диаграммы составляем таблицу значений исходных данных для расчета на персональной ЭВМ по разработанной нами программе.
Таблица 5 – Исходные данные для расчета на ПЭВМ| № положения | X | Y | S | H |
| 1 | 0 | 300000 | 40 | 60 |
| 2 | 44 | 300000 | 49 | 52 |
| 3 | 65 | 240000 | 60 | 31 |
| 4 | 60 | 159000 | 60 | 0 |
| 5 | 39 | 121500 | 51 | 31 |
| 6 | 17 | 87000 | 44 | 52 |
| 7 | 0 | 30000 | 40 | 60 |
| 8 | 17 | 34500 | 44 | 52 |
| 9 | 39 | 42000 | 51 | 31 |
| 10 | 60 | 64500 | 60 | 0 |
| 11 | 65 | 100500 | 60 | 31 |
| 12 | 44 | 144000 | 49 | 52 |
Где X = Pb, S = PS2, H = ab – отрезки с плана скоростей в миллиметрах;
Y = Pi - индикаторное давление, Па.
АВ = 128 мм - длина шатуна на плане механизма;
ml = 0.005 м/мм - масштаб плана механизма;
w1 = 50 с-1 - угловая скорость кривошипа;
d = 0.12 м - диаметр поршня;
J01 = 0.012 кг×м2 - момент инерции кривошипа;
JS2 = 0.020 кг×м2 - момент инерции шатуна;
d = 0.23 - коэффициент неравномерности;
m2 = 2.4 кг - масса шатуна;
m3 = 1.9 кг масса поршня.
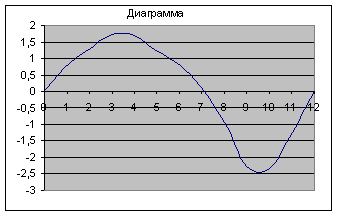
По результатам расчетов строим график изменения приведение момента от движущих сил в функции угла поворота кривошипа. Принимаем условие, что при такте расширения совершается полезная paбота, поэтому график Мпр (j) для первых шести положений располагается выше оси абсцисс, а для остальных шести - ниже.
Определяем масштабы:
mМпр = Мпрмах/уМпрмах = 881.71/110.21 = 8 Нм/мм ;
mj = j/xj = 2p/120 = 0.0523 рад/мм .
Интегрируя график Мпр = Мпр (j) получаем график работы движущих сил Адв = Адв (j).
Учитывая, что при решении задачи расчета маховика рассматривается цикл установившегося неравновесного движения, график работы сил полезного сопротивления Апс = Апс(j) получаем в виде отрезка, соединяющего начало и конец графика работы движущих сил.
Масштаб полученных графиков определится:
mА = mМпр×mj×h = 8·0.0523·40 = 16.7 Дж/мм ,
где h-расстояние от начала координат до полюса интегрирования, 50 мм.
График изменения кинетической энергии - ∆Т = ∆Т(j) получаем как разность ординат графиков Адв(j) и Апс(j), т.е
∆Т = Адв – Апс.
В этой же системе координат по результатам расчетов на ПЭВМ вычерчиваем график изменения кинетической энергии звеньев механизма –Тзв = Тзв(j) с учетом m∆Т = mТзв = mТ = mА.
Вычитая ординаты графика Тзв = Тзв(j) из ординат графика ∆Т = ∆Т(j) получаем график изменения энергии маховика Тм = ∆Т – Тзв. Проекции точек, соответствующих максимальному и минимальному значениям Тм, на ось ординат дадут отрезок (cd), по которому определяем момент инерции маховика
JМ= cd×mT/d×w12 = 61·16.7/0.23·502 = 1.77 кгм2 .
Диаметр обода маховика De определяем из условия, что для стальных маховиков окружная скорость не должна превышать 110 м/с
Dе =< 2Vд/w1 =< 2×110/50 = 4.4 м.
Из конструктивных соображений принимаем диаметр Dе = 0,45 м. Внутренний и внешний диаметры обода маховика определяем по выражениям
Di = 0,85×De = 0,38 м,
Dcp = (De + Di)/2 = 0,415 м.
Определяем массу маховика и ширину его обода
m = 4JM/Dcp2 = 4×1.77/0.4152 = 41.1 кг ,
b = 16×JM/p×r×(De2–Di2 )∙Dcp2=16×1.77/3.14×7800×(0.452–0.382)∙0.4152 = 0.115 м,
где r = 7800 кг/м - плотность материала.
Вычерчиваем эскиз маховика. Для его крепления предусматриваем шпонку и три отверстия под шпильки.
Литература
1. Савченко Ю.А. Стандарт предприятия. Киров: РИО ВГСХА, 2000.- 82 с.
2. Овчинников В.А. Курсовое проектирование по теории механизмов и машин. Киров: ВГСХА, 2000. – 173 с.
Похожие работы

... 7,41 11,96 12,6 Графические 2,5 ; Диаграммы скоростей и ускорений: Рис.4 - Диаграмма скоростей Рис.5 - Диаграмма ускорений 2. Силовой анализ рычажного механизма Исходные данные: Масса кулисы m3=20 кг; Масса ползуна m5=52 кг; Сила полезного сопротивления Qпс=1550 Н. Схема механизма (Рис.6). ...
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
... 1.4 Построение диаграммы перемещений выходного звена. Диаграмма перемещений выходного звена получается в результате построения отрезков, которые берутся с чертежа плоского рычажного механизма в 12 положениях с учётом масштабного коэффициента 1.5 Построение диаграммы скоростей выходного звена. Диаграмма скоростей выходного звена получается в результате графического дифференцирования ...
... 24 0,00 0,00 14,10 14,10 9,30 9,30 58,02 58,02 2.4 Исследование механизма методом кинематических диаграмм Исследование механизмов методом диаграмм производится с целями: 1. Получения наглядного представления о законе движения интересующей нас точки или звена механизма. 2. Определения скоростей и ускорений точек или звеньев на основе известного закона перемещений точек или ...
0 комментариев