МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
СИНТЕЗ ЦИФРОВОГО УПРАВЛЯЮЩЕГО УСТРОЙСТВА
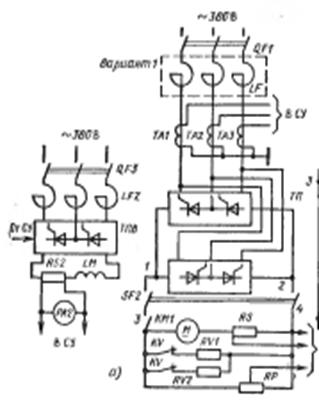
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Навигация
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
18586
знаков
0
таблиц
19
изображений
2 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
2.1 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДВИГАТЕЛЯ
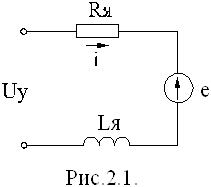 |
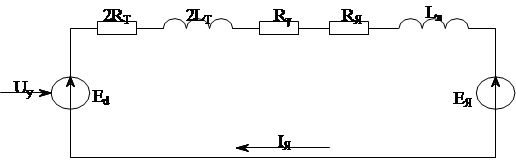
Схема замещения электродвигателя представлена на рис.2.1.
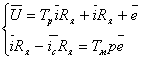
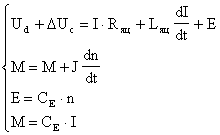
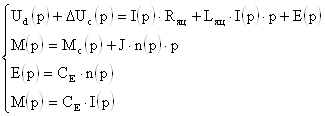
На основании второго закона Кирхгофа для схем замещения можно записать уравнение:
 (2.1)
(2.1)
где ![]() .
.
На основании уравнения динамики:
![]() (2.2)
(2.2)
где ![]() – полный момент
– полный момент
![]() - статический момент
- статический момент
![]() - суммарный момент инерции двигателя
- суммарный момент инерции двигателя
![]() - угловая скорость электродвигателя
- угловая скорость электродвигателя
При постоянном магнитном потоке (![]() ) справедливо:
) справедливо:
 ,
,
![]() ;
;
где ![]() - конструктивные постоянные электродвигателя, которые в системе СИ отличаются на 2% т.е. их можно считать равными.
- конструктивные постоянные электродвигателя, которые в системе СИ отличаются на 2% т.е. их можно считать равными.
Подставив в уравнение 2.1 и 2.2 имеющиеся значения получим:
 (2.3)
(2.3)
 (2.4)
(2.4)
где ![]() - статический ток
- статический ток
Уравнение 2.4 разделим на ![]() и умножим на
и умножим на ![]() :
:
 (2.5)
(2.5)
Выведем:
электрическую постоянную времени:
 (2.6)
(2.6)
электромеханическую постоянную времени:
 (2.7)
(2.7)
Подставим значения постоянных величин времени в уравнение 2.3 и в 2.5:
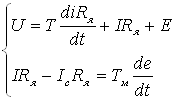 ;
;
Запишем уравнения в дифференциальном виде:
 ;
;
откуда
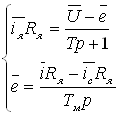 ;
;
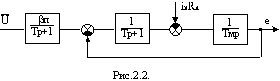 |
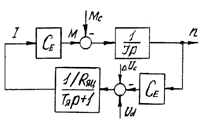
На основании двух последних уравнений составим структурную схему электродвигателя (рис.2.2).
2.2 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ПРЕОБРАЗОВАТЕЛЯ
Полупроводниковый преобразователь представлен интегрирующим звеном с передаточной функцией:
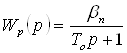 ;
;
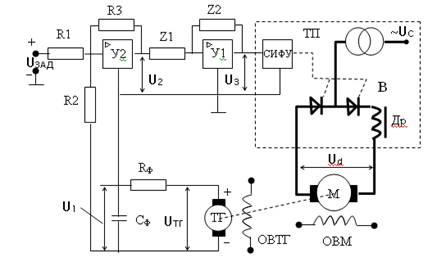
Такое представление отражает инерционные свойства выпрямителя, обусловленные дискретным характером его работы, управляемостью вентилей. Т.о. вычертим структурную схему объекта управления (рис.2.3).
Выпишем передаточную функцию по заданию:

Передаточная функция по возмущению:
 ;
;
Рассчитаем номинальный ток и номинальную угловую скорость двигателя по следующим уравнениям:
Iн=Pн/(hнUн)=2500/(0.72*110)=31,6 A
wн=p*nн/30=3.14*1000/30=104.7 рад/c
Сопротивление якорной цепи определяется:
![]()
Rяц=DUщ/Iд.н=DUщ/Iн=2/31.57=0.063 Ом
Rя.ц=1,26(0,27+0,2)+0,063=0,66 Ом
Lо=(1,2-1,4)*Lя.ц=1,2*0,0057=0,00684 Ом
Rо=(1,2-1,4)*Rя.ц=1,2*0,66=0,8 Ом
Суммарный момент инерции системы:
JS=(1.2-2)*Jо=1,4*0,048=0,07 кг/м^2
Определяем конструктивную постоянную:
Се=(Uн-Iн*Rя.ц)/wн=(110-31,57*0,66)/104.7=0.85
Определяем электромеханическую постоянную времени и электромагнитную постоянную двигателя:
Tм=JRo/Сe^2=0.07*0.8/0.85^2=0.078 c
T=Lo/Ro=0.00684/0.8=0.0098 c
Похожие работы
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
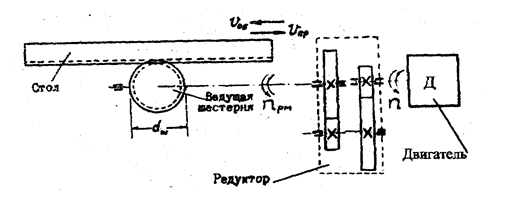
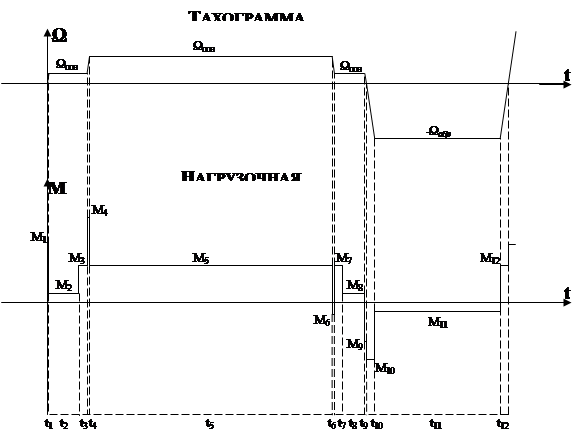
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
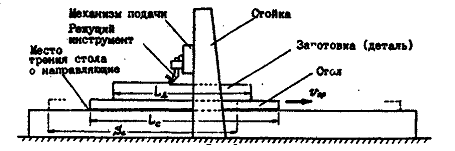
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
0 комментариев