МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
СИНТЕЗ ЦИФРОВОГО УПРАВЛЯЮЩЕГО УСТРОЙСТВА
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Навигация
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
18586
знаков
0
таблиц
19
изображений
4.2 СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
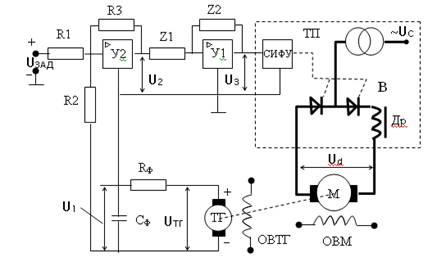
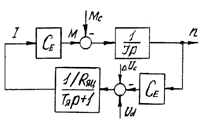
Структурная схема данной САУ показана на рис.4.2.
Отличие данной схемы от предыдущей заключается в том, что в УУ дополнительно вводится сигнал пропорциональной производной от выходного сигнала от задатчика интенсивности с коэффициентами ![]() и
и ![]() . На первый взгляд такая система является физически нереализуемой из-за наличия идеальных дифференцирующих звеньев (
. На первый взгляд такая система является физически нереализуемой из-за наличия идеальных дифференцирующих звеньев (![]() и
и![]() ). Однако на практике дело обстоит иначе. Для получения информации о первой производной выходного сигнала ЗИ нет необходимости прибегать к операции искусственного дифференцирования. Эта информация может быть получена из самого ЗИ.
). Однако на практике дело обстоит иначе. Для получения информации о первой производной выходного сигнала ЗИ нет необходимости прибегать к операции искусственного дифференцирования. Эта информация может быть получена из самого ЗИ.
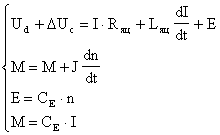
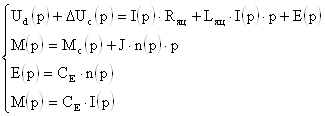
Из структурной схемы можно записать:
![]()
![]()

Знаменатель передаточной функции точно такой же, как и для предыдущей системы, поэтому коэффициенты ![]() рассчитываются точно также. И они равны:
рассчитываются точно также. И они равны:
Ro=0.8 Ом
k1=0.6
k2=0.045
Здесь дополнительно необходимо рассчитать коэффициенты ![]() из условия увеличения быстродействия системы, т.е.
из условия увеличения быстродействия системы, т.е.
 (4.6)
(4.6)
Согласно теореме Виетта получим:
 (4.7)
(4.7)
Быстродействие системы можно увеличить за счет компенсации одной пары комплексно-сопряженных корней. В данном случае корней р1 и р4, т.к. они расположены близко к мнимой оси.
Условие компенсации корней р1 и р4 имеет вид:
![]()
Отсюда можно получить:
![]()
H=119.6
ko=315.7
kon1/n2=0.76H Þ n1=(0.76Hn2)/ko=(0.76*119.6*0.022)/315.7=0.0063
В итоге получим:
![]()
5 СИНТЕЗ САУ С ИСПОЛЬЗОВАНИЕМ НАБЛЮДАТЕЛЯ
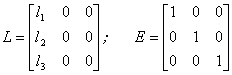
Пусть объект управления описывается уравнением состояния, записанным в матричном виде:
![]() (5.1)
(5.1)
![]() , (5.2)
, (5.2)
где Х и U - это соответственно вектор состояния объекта управления и вектор управления; А и В - матрицы; Y - вектор измеренных координат объекта управления.
В теории управления существует понятие управляемости и наблюдаемости САУ. Причем, если объект является управляемым и наблюдаемым, то он является и индетифицируемым. То есть по входному сигналу U и измеряемому значению У можно восстановить вектор состояния объекта управления Х. Условие управляемости и наблюдаемости имеет вид:
![]() ; (5.3)
; (5.3)
![]() ; (5.4)
; (5.4)
То есть, ранг матрицы управляемости Ny наблюдаемости Nн должен быть равен порядку дифференциального уравнения (п), описывающего поведение объекта.
Наблюдатели или идентификаторы могут быть разомкнутыми или замкнутыми. Алгоритм работы разомкнутого наблюдателя имеет вид:
![]() (5.5)
(5.5)
![]() ; (5.6)
; (5.6)
Здесь ![]() и
и ![]() - соответственно оценочное значение вектора состояния объекта управления и вектор выходных координат наблюдателя, то есть
- соответственно оценочное значение вектора состояния объекта управления и вектор выходных координат наблюдателя, то есть ![]() , а так же изменений коэффициентов матрицы А или неточного определения на этапе проектирования, такой наблюдатель обладает невысокой точностью измерения и на практике широкого распространения не получил. На практике распространение получили замкнутые наблюдатели, алгоритм функционирования которых имеет вид:
, а так же изменений коэффициентов матрицы А или неточного определения на этапе проектирования, такой наблюдатель обладает невысокой точностью измерения и на практике широкого распространения не получил. На практике распространение получили замкнутые наблюдатели, алгоритм функционирования которых имеет вид:
![]() ; (5.7)
; (5.7)
Уравнение (5.2) примет вид:
![]() ;(5.8)
;(5.8)
Соответственные значения матрицы
![]() ;(5.9)
;(5.9)
будут определять быстродействие наблюдателя. Обычно быстродействие наблюдателя принимают в несколько раз выше быстродействия САУ , которая замыкается через наблюдатель.
Целью синтеза наблюдателя является определение коэффициентов матрицы L исходя из его быстродействия. Указанные коэффициенты можно определить методом теории модального управления.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;![]()
 ;
;
![]() ;
;
 ;
;![]()
a12=g/(n2Tм)=0,091/(0,022*0,078)=53;
![]() n2/gT=0.022/(0.091*0.009)=26.9;
n2/gT=0.022/(0.091*0.009)=26.9;
a22=1/T=111.1;
a23=n2/n1T=0.022/(0.0063*0.009)=388;
a33=1/To=1/0.005=200;
 ;
;


![]()
![]() ;
;
![]() ;
;
tрнаs=(0,2-0,4)*tpc=0.012;
Hнаs=6/tрнаs=1/0,012=500;
i1=688.9;
i2=(2H^2-i1a22-a33(i1+a22)-a12a21/a12=3950.1;
i3=(H^3-i1a22a33-a12a23(a21+i2))/(a12a33)=95379608.5;
Составим структурную схему наблюдателя.
![]() ;
;
![]() ;
;
![]() ;
;
Согласно данным уравнениям строим структурную схему наблюдателя.
Похожие работы
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
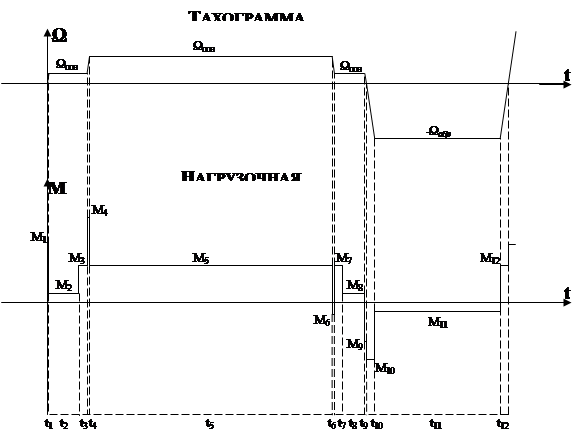
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
0 комментариев