МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
СИНТЕЗ ЦИФРОВОГО УПРАВЛЯЮЩЕГО УСТРОЙСТВА
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Навигация
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
18586
знаков
0
таблиц
19
изображений
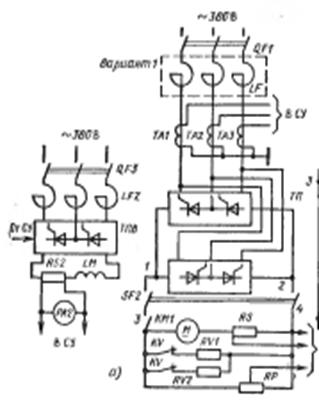
7. ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
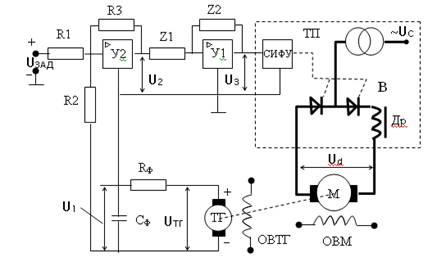
7.1 Расчет принципиальной схемы управляющего устройства, синтезированного методом последовательной оптимизации:
СУПР – система управления преобразователем;
ПР – силовая схема преобразователя;
Задатчик интенсивности регулирования на операционных усилителях DA1 DA2 и DA3 (релейные элементы и интегратор).
УТ – усилитель тока, выполняет функцию потенциальной развязки выходного сигнала с силовой схемой, так же выполняет функцию усилителя.
Регулятор скорости реализован на усилителе DA2. Регулировка тока реализована на усилителе DA5.
Зададимся
R4=R3=8 кОм.
R10=R11=33 кОм.
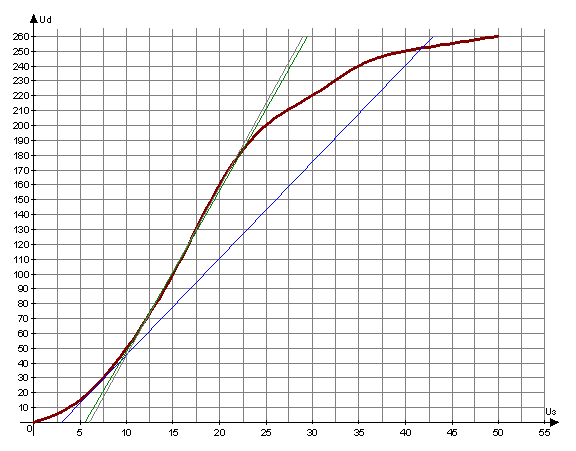
Для получения полного диапазона регулирования, т.е. максимальной скорости, сигнал на выходе DA6 при насыщении DA4 должен быть не менее 10В. Это условие можно записать в статическом режиме:
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Зададимся С2=0,13 мкФ.
![]() ;
;
![]() ;
;
![]() ;
;
Инерционное звено R6 - C3 служит для фильтрации сигнала, для помехозащищенности Тф=R6C3.
7.2 Проектирование принципиальной схемы методом последовательной оптимизации контуров
Регулятор тока реализован на DA6, статический регулятор скорости - на DA4, DA2 и DA7 - служат для инвертирования сигнала.
Регулятор тока называется пи-регулятором.
![]() ;
;
![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
;
![]() ; зададимся
; зададимся ![]() ;
;
![]() ;
; ![]() ;
;
Регулятор скорости. Потенциометры с диодами служат для ограничения вых. напряжения статического регулятора скорости, т.е. ограничения напряжение задания тока. Для получения полного диапазона регулирования скорости, выходное напряжение на DA6 должно превышать выходной сигнал датчика тока, поступающий на R16
![]() ;
;
![]() ;
; ![]() ;
;
Условие выполняется:
![]() p;
p;
![]() ;
; ![]() ;
; ![]() ;
;
Зададимся С2=2×10-6 ф.
7.3. Проектирование принципиальной схемы с использованием наблюдателя.
Усилитель DA5 выполняет функции только инвертора:
![]() ;
; ![]() ;
;
Сопротивление R1, согласно с требованием схемы, будет определяться коэффициентом l3, т.е.
![]() ;
;
Зададимся ![]() . Тогда
. Тогда ![]() ;
;
![]() ;
;
![]() ;
;
Зададимся ![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Зададимся ![]() ; Тогда
; Тогда![]() .
.
ЗАКЛЮЧЕНИЕ
Оценим быстродействие системы, синтезированной методом модального управления и методом оптимизации контуров.
Время регулирования астатического контура скорости tрса=24T0.
Время регулирования системы синтезированной методом модального управления tр му=6,8/H.
![]() ;
;
если ![]() ;
;
![]() ;
;
![]()
![]() ;
;
Т.е. качество обработки линейного закона скорости выше в системе, синтезированной методом модального управления. САУ синтезированная методом модального управления является наиболее качественной.
Похожие работы
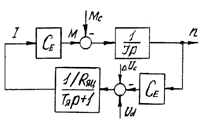
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
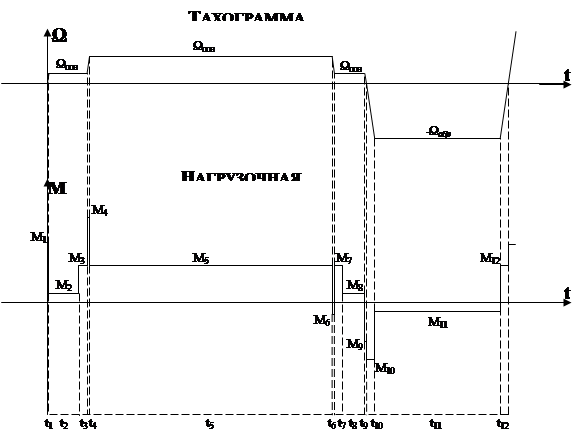
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
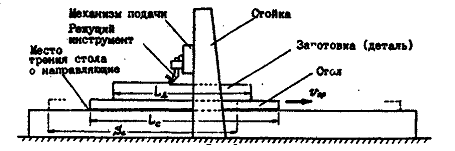
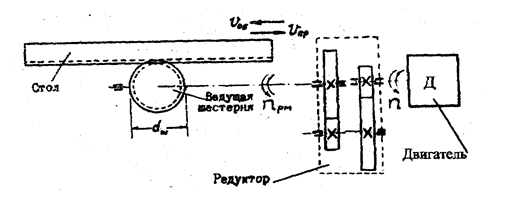
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
0 комментариев