МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
СИНТЕЗ ЦИФРОВОГО УПРАВЛЯЮЩЕГО УСТРОЙСТВА
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Навигация
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
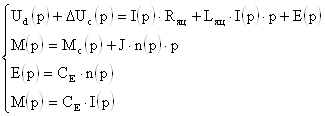
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
18586
знаков
0
таблиц
19
изображений
3.3 СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
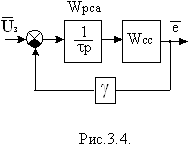 |
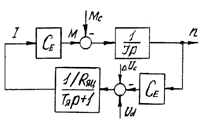
Структурная схема астатического контура регулирования скорости
показана на рис.3.4.
Передаточная функция статического контура регулирования скорости имела вид:
 (3.4)
(3.4)
На основании структурной схемы (рис. 3.4) и выражения 3.4 запишем:
![]()
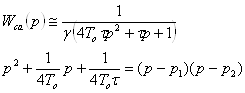
Передаточная функция:
![]()
Делаем допущение, что коэффициент при старшей степени p равен нулю.
![]()
p^2+(1/4To)p+1/(4Tot)=p^2+2scapp+2sca^2
1/4To=2sca Þ sca=1/8To
tpca=24To=0.12
1/(4Tot)=2sca^2=1/(32To^2) Þ t=8To=8*0.005=0.04 c
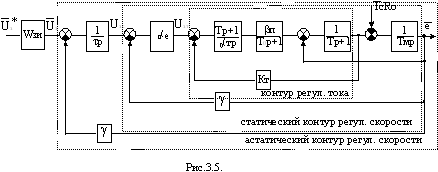
Полная структурная схема системы автоматического регулирования скорости, синтезированной методом последовательной оптимизации контуров, показана на рис. 3.5.
4 СИНТЕЗ САУ МЕТОДОМ МОДАЛЬНОГО УПРАВЛЕНИЯ
Термин «модальное управление» происходит от слова moda – свободное движение.
Метод модального управления, как правило, используется для синтеза астатических САУ. В статических системах существует зависимость между статическими и динамическими свойствами системы, т.е. получив нужные динамические свойства, статические могут оказаться неудовлетворительными. Астатические системы такой проблемы не знают, т.е. получив нужные динамические свойства, статические получаются автоматически.
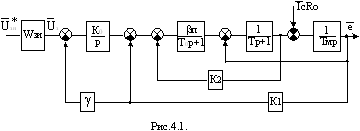
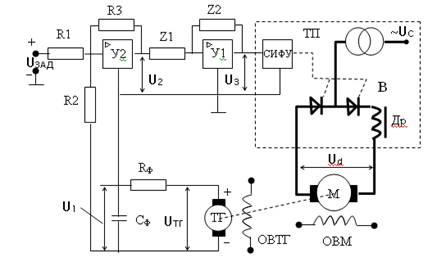
Структурная схема представлена на рис. 4.1. Здесь ![]() - передаточная функция задатчика интенсивности, который преобразует ступенчатый сигнал в линейный и служит для формирования свойств системы по возмущению.
- передаточная функция задатчика интенсивности, который преобразует ступенчатый сигнал в линейный и служит для формирования свойств системы по возмущению.
4.1 СИНТЕЗ САУ БЕЗ УЛУЧШЕННЫХ ДИНАМИЧЕСКИХ ПОКАЗАТЕЛЕЙ
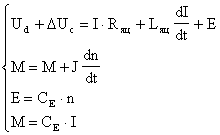
Структурная схема данной САУ показана на рис. 4.2. На основании структурной схемы можно записать следующее:
![]()
Передаточная функция данной системы будет иметь вид:
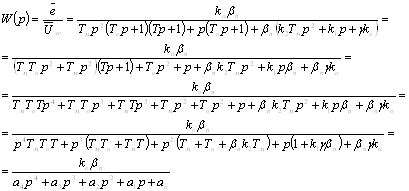
Прировняв коэффициенты при одинаковых степенях p можно записать:
![]()

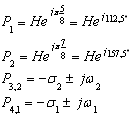
Зададимся распределением характеристических корней по Баттерворду:
![]()
где Н – модуль (чем больше модуль, тем выше быстродействие системы); n – порядок уравнения; i – порядковый номер характеристического уравнения.
Т.о. получим:
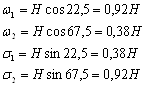
Таким образом из вышеуказанного можно записать:

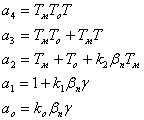
Прировняв коэффициенты при одинаковых степенях p, получим:
![]() (4.1)
(4.1)
![]() (4.2)
(4.2)
![]() (4.3)
(4.3)
![]() (4.4)
(4.4)
Из 4.1 получим:
To=0.005c
T=0.009c
H=(1/0.005+1/0.009)/2.6=119.6
Из 4.2 получим:
![]()
Tм=0.078с
bп=25
k2=(3.4*119.6^2*0.078*0.005*0.009-0.078-0.005)/(25*0.078)=0.045
Из 4.3 получим:
k1=(2.6*H^3*Tм*To*T-1)/bп=(2.6*119.6^3*0.078*0.005*0.009-1)/25=0.6
Из 4.4 получим:
![]()
g=0.091
ko=(119.6^4*0.078*0.005*0.009)/(25*0.091)=315.7
Похожие работы
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
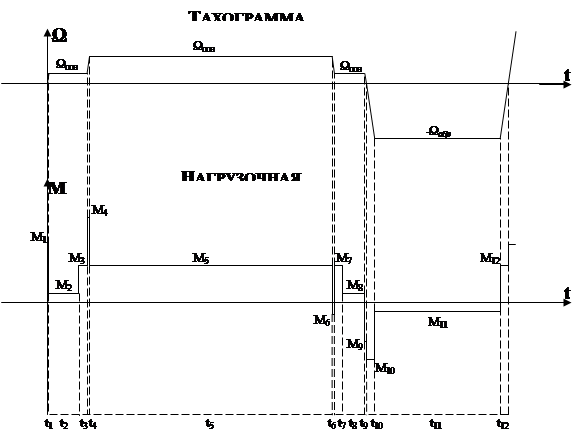
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
0 комментариев