Навигация
Решение алгебраического уравнения Риккати методом диагонализации
99279
знаков
0
таблиц
156
изображений
5.1.1. Решение алгебраического уравнения Риккати методом диагонализации
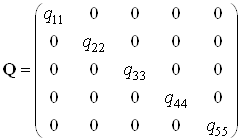
Для решения данной задачи найдем весовые матрицы ![]() и
и ![]() :
:
Выберем произвольно ![]() , тогда
, тогда

Взяв значения ![]() из решения задачи L – проблемы моментов получим:
из решения задачи L – проблемы моментов получим:

Матрицы системы имеют вид:

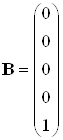 ,
, ![]() .
.
Введем расширенный вектор состояния 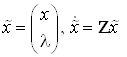 .
.
Тогда матрица Z будет иметь следующий вид:  ,
,
или в численном виде
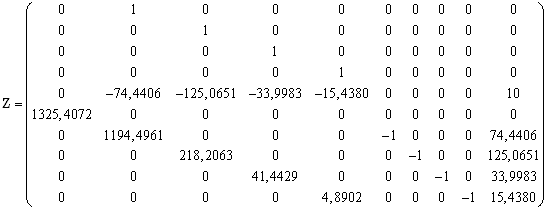 .
.
Собственные значения матрицы ![]() :
: 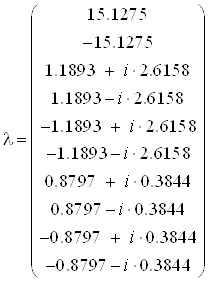 .
.
Зная собственные значения и собственные вектора матрицы Z, построим матрицу ![]()
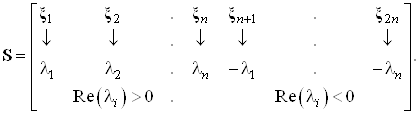
По определению все решения должны быть устойчивы при любых начальных условиях ![]() , т.е. при
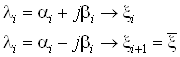
, т.е. при ![]() . Чтобы не оперировать комплексными числами, осуществим следующий переход. Пусть:
. Чтобы не оперировать комплексными числами, осуществим следующий переход. Пусть:
Тогда матрица ![]() формируется следующим образом:
формируется следующим образом:
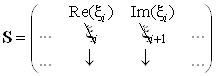 .
.
Можно показать, что матрицу можно получить из прямой матрицы собственных векторов:
 ,
,
![]() .
.
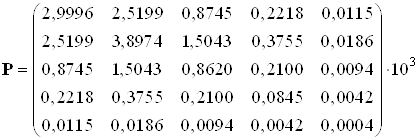
Установившееся решение уравнения Риккати, полученное с помощью скрипта Solve_Riccati_Method_Diag.m. имеет вид:
Весовые матрицы ![]() и
и ![]() такие же как и в пункте (5.1.1).
такие же как и в пункте (5.1.1).
Матрицы ![]() тоже аналогичны.
тоже аналогичны.
Запишем уравнение Риккати
![]() .
.
Зная, что ![]() , решаем уравнение методом обратного интегрирования на достаточно большом интервале (примерно 10 с.), получим установившееся решение с помощью скрипта
, решаем уравнение методом обратного интегрирования на достаточно большом интервале (примерно 10 с.), получим установившееся решение с помощью скрипта
Solve_Riccati_Method_Revers_Integr.m.:
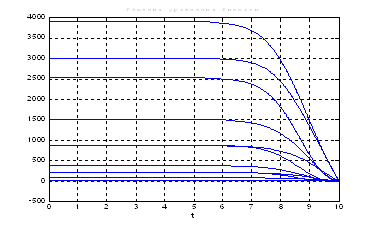
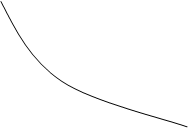
Рис.22. Графики решения уравнения Риккати.
Найдем разницу между решениями уравнения Риккати в пунктах 5.1.1 и 5.1.2:
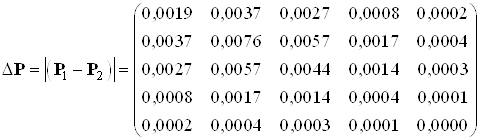
Выводы: сравнивая решения полученные в пунктах 5.1.1 и 5.1.2 можно сказать, что решения уравнения Риккати первым и вторым методами совпадают с заданной точностью. Погрешность расхождения решений невелика.
Используя скрипт AKOR_stabilizaciya_na_polybeskon_interval.m получим коэффициенты регулятора, фазовые координаты системы и управление.
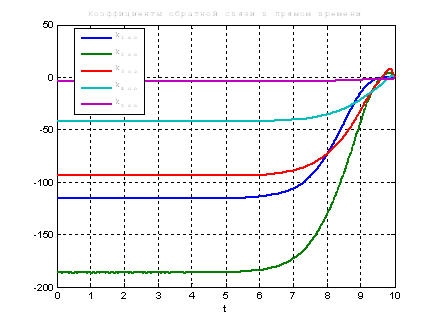
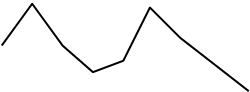
Рис.23. Графики коэффициентов регулятора обратной связи.
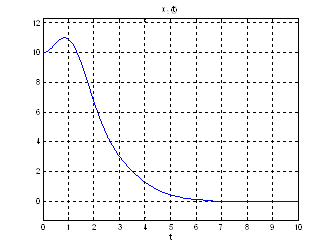
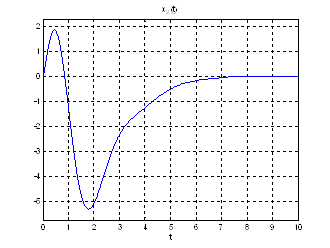
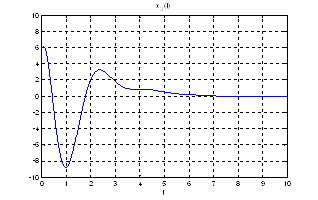
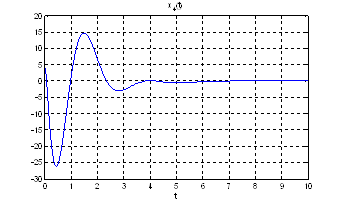
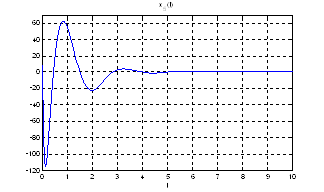
Рис.24. Графики фазовых координат.
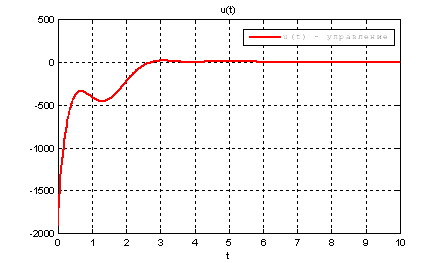
Рис.25. График управления.
Выводы: т.к. решения уравнения Риккати методом диагонализации и интегрирования в обратном времени дают практически одинаковый результат, то можно считать, что задача АКОР – стабилизации на полубесконечном интервале решена с заданной точностью.
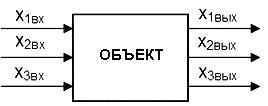
5.2 Стабилизации объекта управления на конечном интервале времениРассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме

Начальные условия для заданной системы ![]()
Время стабилизации ![]() .
.
Необходимо получить закон управления
![]()
минимизирующий функционал вида

Закон оптимального управления в данной задаче имеет вид
![]()
Матричное дифференциальное уравнение Риккати будет иметь следующий вид:
![]()
Если обозначить ![]() то можно записать
то можно записать
![]()
Уравнение замкнутой скорректированной системы примет вид
![]()
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
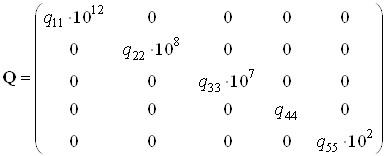 ,
, ![]() .
.
Используя скрипт AKOR_stabilizaciya_na_konech_interval.m получили следующие результаты:
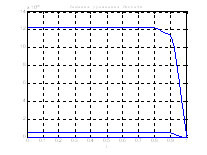
Рис.26. Графики решения уравнения Риккати.
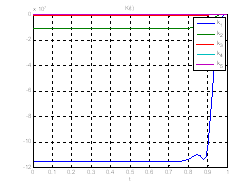
Рис.27. Графики коэффициентов регулятора обратной связи.
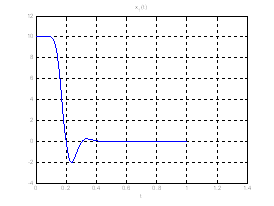
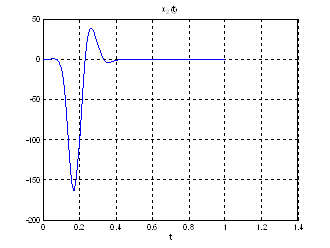
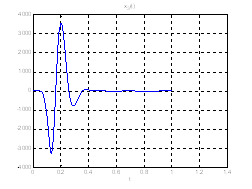
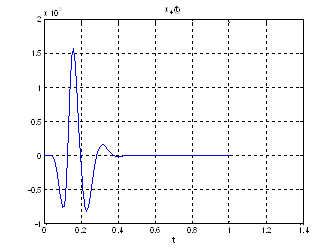
Рис.28. Графики фазовых координат.
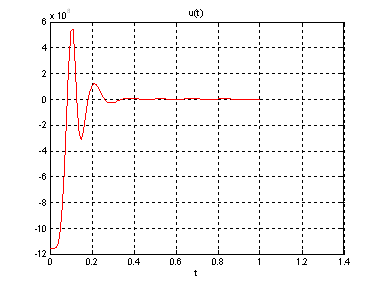
Рис.29. График управления.
Сравним, как стабилизируется система управления с постоянными и переменными коэффициентами регулятора обратной связи на начальном этапе:
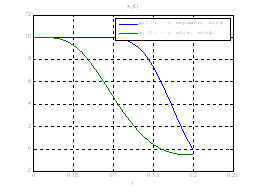

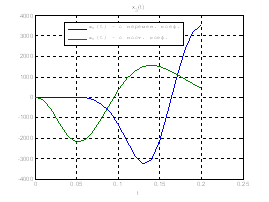

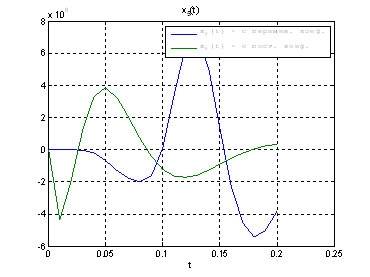
Рис.30. Графики фазовых координат.
Выводы: из графиков видно, что система, у которой коэффициенты регулятора меняются со временем, стабилизируется не хуже, чем, система, у которой коэффициенты регулятора не изменяются.
5.3 Задача АКОР – стабилизации для компенсацииизвестного возмущающего воздействия
Рассмотрим систему вида
![]() ,
,
где ![]() – возмущающее воздействие.
– возмущающее воздействие.
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Начальные условия для заданной системы ![]() .
.
Время стабилизации ![]() .
.
Задаем возмущающее воздействие только на первую координату, так как только она имеет значение
 и
и  .
.
Решение задачи стабилизации сводится к решению уравнения Риккати
![]()
с начальными условиями: ![]()
Введём вспомогательную вектор-функцию ![]() , ДУ которой имеет вид:
, ДУ которой имеет вид:
![]()
с начальными условиями: ![]() .
.
Управление определяется по формуле:
![]() .
.
Используя скрипт AKOR_stabilizaciya_pri_vozmusheniyah.m, получили следующие результаты:
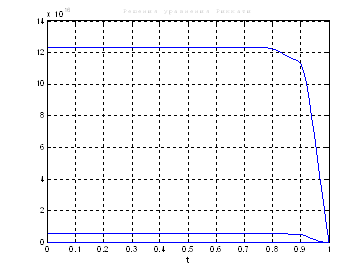
Рис.31. Графики решения уравнения Риккати.
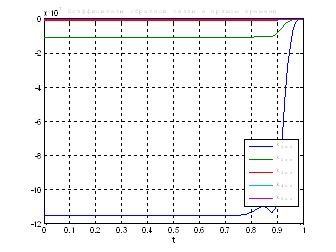
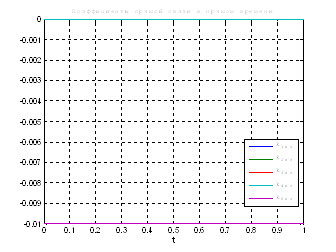
Рис.32. Графики коэффициентов регулятора обратной и прямой связи.
Рис.33. График возмущающего воздействия.
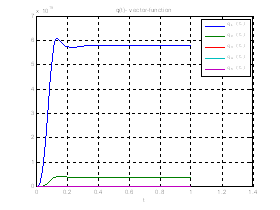
Рис.34. График вспомогательной вектор – функции.
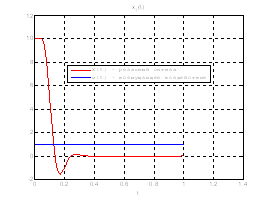
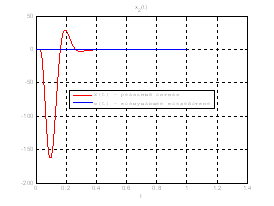
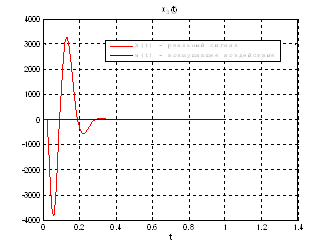
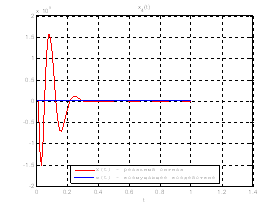
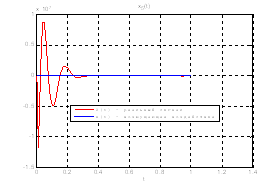
Рис.35. Графики фазовых координат.
Рис.36. График управления.
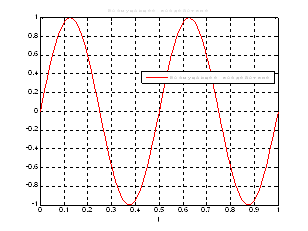
Рис.37. График возмущающего воздействия.
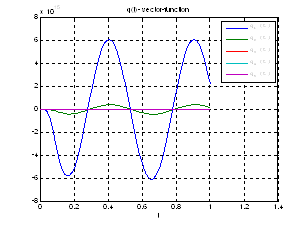
Рис.38. График вспомогательной вектор – функции.

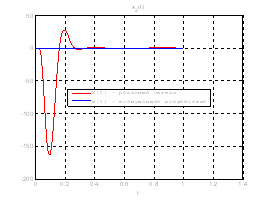
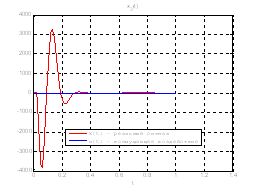
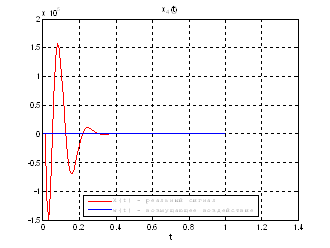
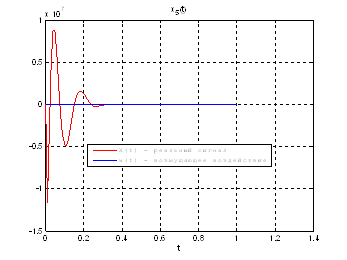
Рис.39. Графики фазовых координат.

Рис.40. График управления.
Выводы: По графикам фазовых координат при различных воздействиях видно, что влияние возмущающего воздействия не существенно и фазовые координаты устанавливаются в ноль. При этом видно, что графики первой фазовой координаты при различных воздействиях мало отличаются друг от друга, т.е. система отрабатывает любое возмущение.
5.4 Задача АКОР для отслеживания известного задающего воздействия. I подход
Система задана в виде:
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
, ![]() .
.
Начальные условия для заданной системы ![]() .
.
Время слежения ![]() .
.
Задающее воздействие в виде системы ДУ
Начальные условия для воздействия:
![]() .
.
Введем расширенный вектор состояния и расширенные матрицы ![]()
 ,
,
 ,
,
 .
.
Тогда новое описание системы имеет вид:
![]()
с начальными условиями:  .
.
Решением уравнения Риккати будет матрица:
с н.у.![]()
Тогда оптимальное управление, находится по формуле:
![]()
Используя скрипт AKOR_slegenie_na_konech_interval_I_podxod, получили следующие результаты:
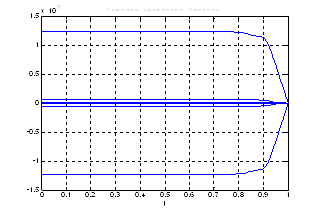
Рис.41. Графики решения уравнения Риккати.
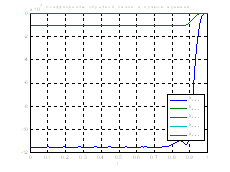
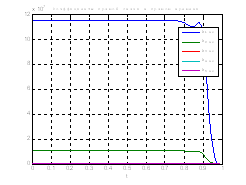
Рис.42. Графики коэффициентов регулятора обратной и прямой связи.

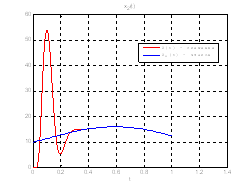
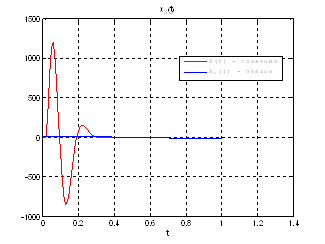
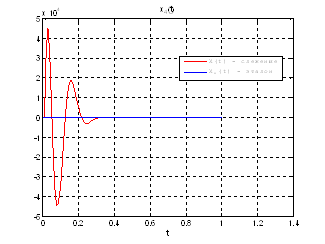
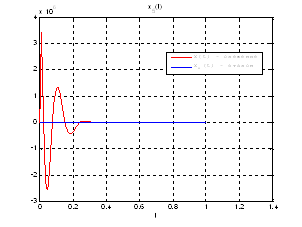
Рис.43. Графики фазовых координат.
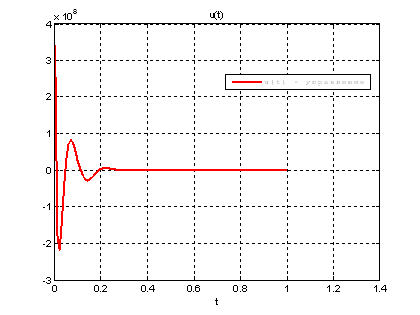
Рис.44. График управления.
Выводы: На данном этапе была решена задача АКОР-слежения. В качестве отслеживаемого воздействия была взята исходная система, но с другими начальными условиями, поэтому графики фазовых координат отличаются от заданных, но только на начальном участке движения.
5.5 Задача АКОР для отслеживания известного задающего воздействия. II подход (линейный сервомеханизм)Система задана в виде:
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
, ![]() .
.
Начальные условия для заданной системы ![]() .
.
Задающее воздействие имеет вид:
![]() ,
, ![]() .
.
Время слежения ![]()
Введём вспомогательную вектор-функцию ![]() , ДУ которой определяется
, ДУ которой определяется ![]()
![]() ,
,
![]() ,
,
НУ определяются из соотношения
Зная закон изменения ![]() и
и ![]() , можно определить управление:
, можно определить управление:
![]() .
.
Используя скрипт AKOR_slegenie_na_konech_interval_II_podxod, получили следующие результаты:
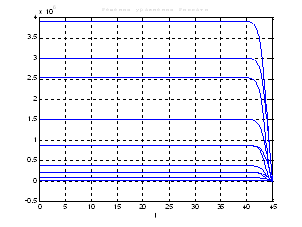
Рис.45. Графики решения уравнения Риккати.
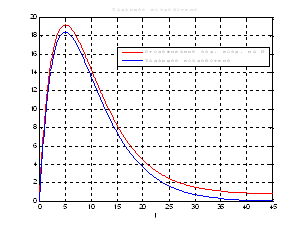
Рис.46. График задающего воздействия.
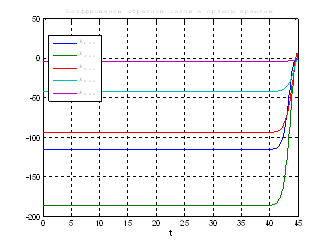
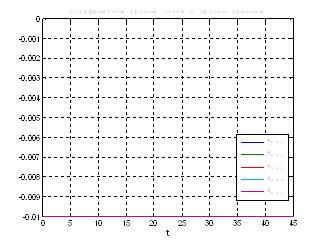
Рис.47. Графики коэффициентов регулятора обратной и прямой связи.
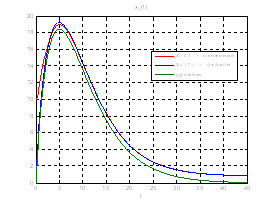
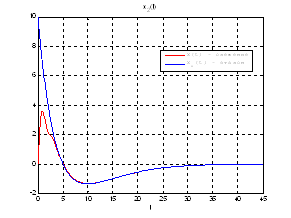
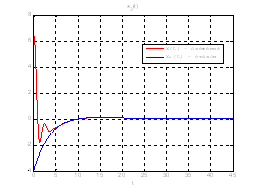
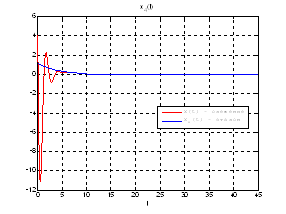
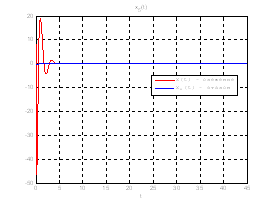
Рис.48. Графики фазовых координат.

Рис.49. График управления.
Выводы: На данном этапе была решена задача построения линейного сервомеханизма. В качестве отслеживаемого воздействия была задана экспоненциальная функция. Анализируя выше приведенные графики, можно сказать, что все состояния заданной системы, особенно первая фазовая координата, отслеживается с заданной точностью.
5.6 Задача АКОР – слежения со скользящими интерваламиПусть интервал времени ![]() является объединением нескольких отрезков. Известно некоторое задающее воздействие
является объединением нескольких отрезков. Известно некоторое задающее воздействие ![]() заданное аналитическим выражением, причем информация о задающем сигнале на следующем отрезке времени поступает только в конце предыдущего. Таким образом, зная задающий сигнал только на одном отрезке времени, мы будем синтезировать управление на этом отрезке.
заданное аналитическим выражением, причем информация о задающем сигнале на следующем отрезке времени поступает только в конце предыдущего. Таким образом, зная задающий сигнал только на одном отрезке времени, мы будем синтезировать управление на этом отрезке.
Разобьем весь интервал на 3 равных отрезка.
Данная задача похожа на задачу отслеживания известного задающего воздействия, заданного аналитическим выражением, но с некоторыми изменениями:
1. Поскольку в уравнение Риккати относительно матрицы ![]() входят только параметры системы и функционала качества, то решать его будем один раз на первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но будет смещено по времени:
входят только параметры системы и функционала качества, то решать его будем один раз на первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но будет смещено по времени:
![]()
![]()
![]()
![]()
2. Начальными условиями для системы на каждом отрезке будет точка, в которую пришла система на предыдущем отрезке:
![]()
![]()
![]()
![]()
3. Вектор ![]() необходимо пересчитывать на каждом отрезке.
необходимо пересчитывать на каждом отрезке.
Похожие работы
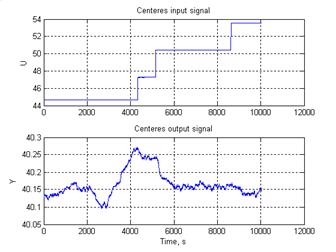
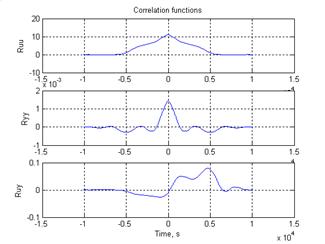
... степеней свободы. Величину критерия Фишера (F-критерий) определяют по формуле: (должно быть). Значимость коэффициентов bi уравнения регрессии определяют по t-критерию (критерии Стьюдента): , . Идентификация объектов управления методом корреляционного анализа Метод корреляционного анализа используется для идентификации объектов управления в том случае, если входные и выходные ...
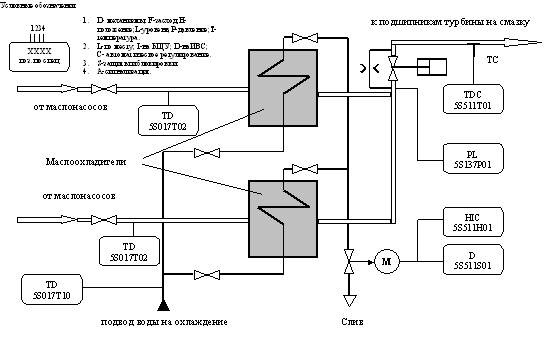
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...

... проектирования. Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС. Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью ...
... damn(t)/dt =[daij(t)/dt] 1.3 ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА. Физический объект - физическое устройство, характеризуемое некоторым числом свойств, соответствующих целям его использования. В теории систем существенным является не физическое, а математическое описание свойств объекта и соотношений между ними. В теории систем объектом А является абстрактный объект, связанный с множеством ...
0 комментариев