Навигация
В остальном данная задача аналогична задаче построения линейного сервомеханизма (пункт 5.5)
99279
знаков
0
таблиц
156
изображений
4. В остальном данная задача аналогична задаче построения линейного сервомеханизма (пункт 5.5).
Используя скрипт AKOR_slegenie_so_skolz_intervalami_Modern, получили следующие результаты:
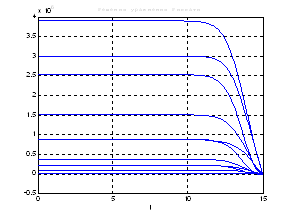
Рис.50. Графики решения уравнения Риккати.
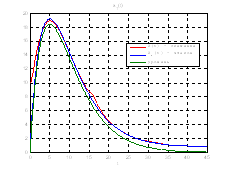
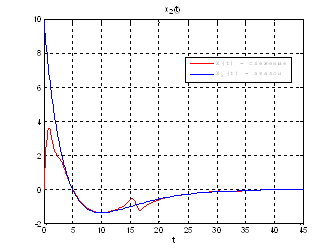
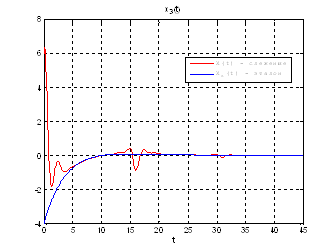
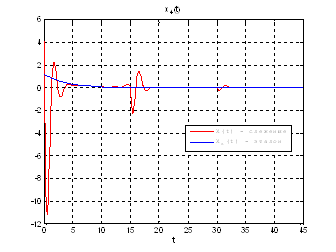
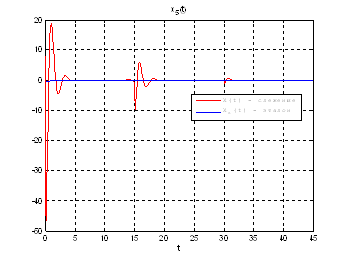
Рис.51. Графики фазовых координат.
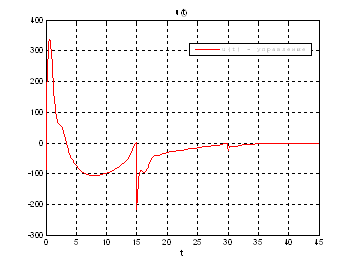
Рис.52. График управления.
Выводы: при сравнении полученных результатов, можно сказать, что различия в фазовых координатах при наличии трех участков и при наличии одного участка несущественные. Если сравнивать скорость вычислений и используемые ресурсы, то скорость увеличивается почти в 3 раза, а памяти требуется в 3 раза меньше для решения поставленной задачи. В точках соединения участков наблюдаются скачки, связанные с тем, что требуется значительные затраты на управление, но для первой координаты этот скачок незначительный.
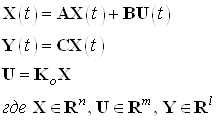
6. Синтез наблюдателя полного порядка
Наблюдателями называются динамические устройства, которые позволяют по известному входному и выходному сигналу системы управления получить оценку вектора состояния. Причем ошибка восстановления ![]() .
.
Система задана в виде:
Начальные условия для заданной системы ![]() .
.
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Построим наблюдатель полного порядка и получим значения наблюдаемых координат ![]() таких, что:
таких, что: ![]()

В качестве начальных условий для наблюдателя выберем нулевые н.у.:
![]()
Ранг матрицы наблюдаемости:
![]() - матрица
- матрица
наблюдаемости.
 .
.
![]() .
.
Т. е. система является наблюдаемой.
Коэффициенты регулятора:
![]() ,
,
тогда
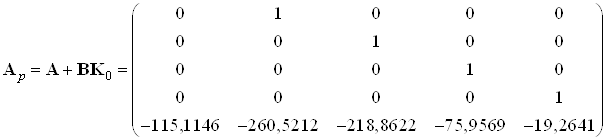
Собственные значения матрицы ![]() :
:
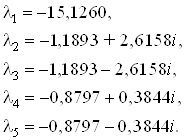
Коэффициенты наблюдателя выберем из условия того, чтобы наблюдатель был устойчивым, и ближайший к началу координат корень матрицы ![]() лежал в 3 – 5 раз левее, чем наиболее быстрый корень матрицы
лежал в 3 – 5 раз левее, чем наиболее быстрый корень матрицы ![]() . Выберем корни матрицы
. Выберем корни матрицы
![]()
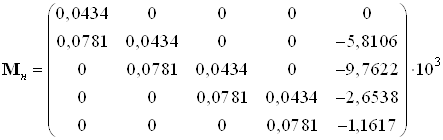
Коэффициенты матрицы наблюдателя:
![]() .
.
Используя скрипт Sintez_nablyud_polnogo_poryadka, получили следующие результаты:
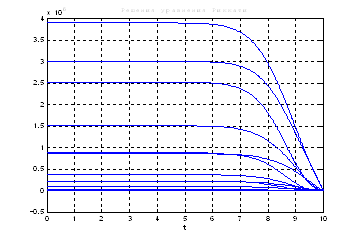
Рис.53. Графики решения уравнения Риккати.
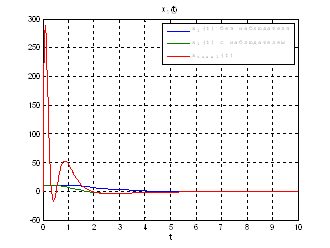
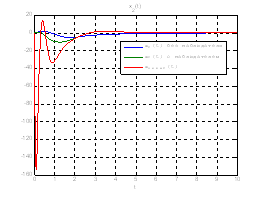
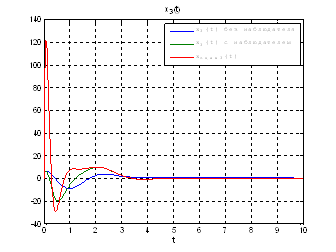
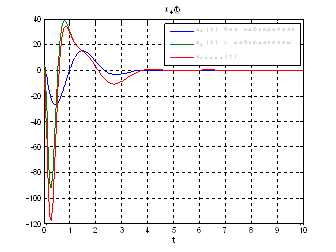

Рис.54. Графики фазовых координат.
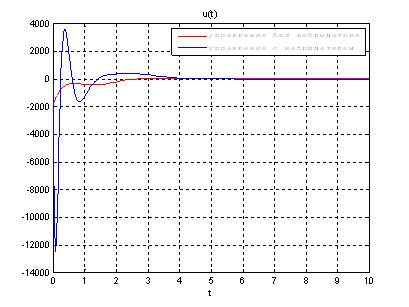
Рис.55. Графики управлений.
Выводы: Так как система является полностью наблюдаема и полностью управляема, то спектр матрицы ![]() может располагаться произвольно. Перемещая собственные значения матрицы
может располагаться произвольно. Перемещая собственные значения матрицы ![]() левее, относительно собственных значений матрицы
левее, относительно собственных значений матрицы ![]() мы улучшаем динамику системы, однако, наблюдатель становится более чувствителен к шумам.
мы улучшаем динамику системы, однако, наблюдатель становится более чувствителен к шумам.
Литература
1. Методы классической и современной теории автоматического управления: Учебник в 5 – и т. Т.4: Теория оптимизации систем автоматического управления / Под ред. Н.Д. Егупова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. – 748 с.
2. Краснощёченко В.И.: Методическое пособие: «Методы теории оптимального управления».
Приложение.
PlotTimeFrHaract.mclc
clear all
close all
b1 = 9;
b0 = 5;
a4 = 0.1153;
a3 = 1.78;
a2 = 3.92;
a1 = 14.42;
a0 = 8.583;
% syms s w
% W_s_chislit = b1 * s + b0;
% W_s_znamen = s * (a4 * s^4 + a3 * s^3 + a2 * s^2 + a1 * s + a0);
%
% W_s_obj = W_s_chislit/W_s_znamen;
%A_w = collect(simplify(abs(subs(W_s_obj, s, i*w))))
%----------------------Построение АЧХ-------------------------------------%
figure('Name', '[0,10]');
w = 0 : 0.01 : 10;
A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2));
plot(w,A_w,'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('A(w)')
title('Function ACHX(w)')
%-------------------------------------------------------------------------%
r_ch = roots([b1 b0])
r_zn = roots([a4 a3 a2 a1 a0 0])
%----------------------Построение ФЧХ-------------------------------------%
figure('Name', '[0,100]');
w = 0 : 0.01 : 100;
fi_w = (atan(w/0.5556)-atan(w/0)-atan(w/13.5832)-atan((w-2.7677)/0.5850)...
-atan((w+2.7677)/0.5850) - atan(w/(0.6848)))*180/pi;
plot(w,fi_w, 'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('fi(w)')
title('Function FCHX(w)')
%-------------------------------------------------------------------------%
%----------------------Построение АФЧХ------------------------------------%
figure('Name', '[0,100]');
w = 0 : 0.01 : 100;
A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2));
fi_w = (atan(w/0.5556)-atan(w/0)-atan(w/13.5832)-atan((w-2.7677)/0.5850)...
-atan((w+2.7677)/0.5850) - atan(w/(0.6848)));
polar(fi_w,A_w, 'k');
grid on
xlabel('Re(W(jw))')
ylabel('Im(W(jw))')
title('Function AFCHX(fi_w,A_w)')
%-------------------------------------------------------------------------%
%----------------------Построение ЛАЧХ------------------------------------%
figure('Name', '[0,100]');
w = -100 : 0.01 : 100;
LA_w = 20*log(sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2)));
plot(w,LA_w,'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('L(w)')
title('Function L(w)')
%-------------------------------------------------------------------------%
%----------------------Построение ФАЧХ------------------------------------%
%-------------------------------------------------------------------------%
%----------------------Построение h(t)------------------------------------%
figure('Name', '[0,50]');
t = 0 : 0.01 : 50;
h_t = 0.0024 * exp(-13.5832.*t) - 0.2175 * exp(-0.6848.*t)...
+ 0.1452 * exp(-0.5850.*t).* cos(2.7677.*t)...
- 0.2217 * exp(-0.5850.*t).* sin(2.7677.*t)...
+ 0.5825 .* t + 0.0699;
plot(t,h_t, 'k', 'LineWidth', 2);
grid on
xlabel('t')
ylabel('h(t)')
title('Function h(t)')
%-------------------------------------------------------------------------%
%----------------------Построение k(t)------------------------------------%
figure('Name', '[0,50]');
t = 0 : 0.01 : 50;
k_t = - 0.0329 * exp(-13.5832.*t) + 0.1489 * exp(-0.6848.*t)...
- 0.6986 * exp(-0.5850.*t).* cos(2.7677.*t)...
- 0.2721 * exp(-0.5850.*t).* sin(2.7677.*t)...
+ 0.5826;
plot(t,k_t, 'k', 'LineWidth', 2);
grid on
xlabel('t')
ylabel('k(t)')
title('Function k(t)')
%-------------------------------------------------------------------------%
x1=tf([b1 b0],[a4 a3 a2 a1 a0 0]);
ltiview(x1)
ProstranstvoSostoyanii.mclc
clear all
%format rational
b1 = 9;
b0 = 5;
a5 = 0.1153;
a4 = 1.78;
a3 = 3.92;
a2 = 14.42;
a1 = 8.583;
a0 = 0;
%1. Матрица Фробениуса
A=[0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0;
0 0 0 0 1;
0 -a1/a5 -a2/a5 -a3/a5 -a4/a5]
B=[0; 0; 0; 0; 1/a5]
C=[b0 b1 0 0 0]
%Проверка
syms s
W_s = collect(simplify(C*(s.*eye(5)-A)^(-1)*B),s)
pretty(W_s)
%2. Параллельная декомпозиция
b1 = b1/a5;
b0 = b0/a5;
s1 = 0;
s2 = -6615/487;
s3 = -1022/1747 + 4016/1451*i;
s4 = -1022/1747 - 4016/1451*i;
s5 = -415/606;
alfa = real(s3);
beta = imag(s3);
syms s A B C D E
W_s_etal = collect(((b1*s+b0)/((s-s1)*(s-s2)*((s+alfa)^2+beta^2)*(s-s5))),s)
%pretty(W_s_etal)
Slag_1 = simplify(collect(A*(s-s2)*((s+alfa)^2+beta^2)*(s-s5),s));
Slag_2 = simplify(collect(B*(s-s1)*((s+alfa)^2+beta^2)*(s-s5),s));
Slag_3 = simplify(collect(C*(s-s1)*((s+alfa)^2+beta^2)*(s-s2),s));
Slag_4 = simplify(collect((D*s+E)*(s-s1)*(s-s2)*(s-s5),s));
Chislit_W_s =collect(Slag_1 + Slag_2 + Slag_3 + Slag_4,s);
%Решение системы линейных уравнений
MS =double( [1 1 1 1 0;
6753029497/515578134 -513659/1058682 10560977/850789 4210795/295122 1;
77456808434995506239663107/126764366837761533378822144 1874500571398143988939141/260296441145300889894912 -3300780600401725219142291/418364246989311991349248 915075/98374 4210795/295122;
26189071674868424275768861465/253528733675523066757644288 2853037197681682345182805/520592882290601779789824 45476725452203201718998205/418364246989311991349248 0 915075/98374;
6290947020888109571128085025/84509577891841022252548096 0 0 0 0])
PCH = [0; 0; 0; b1; b0];
Koeff = MS^(-1)*PCH
%Проверка
MS*[Koeff(1);Koeff(2);Koeff(3);Koeff(4);Koeff(5)];
Slag_1 = simplify(collect(Koeff(1)*(s-s2)*((s+alfa)^2+beta^2)*(s-s5),s));
Slag_2 = simplify(collect(Koeff(2)*(s-s1)*((s+alfa)^2+beta^2)*(s-s5),s));
Slag_3 = simplify(collect(Koeff(3)*(s-s1)*((s+alfa)^2+beta^2)*(s-s2),s));
Slag_4 = simplify(collect((Koeff(4)*s+Koeff(5))*(s-s1)*(s-s2)*(s-s5),s));
Chislit_W_s =collect((Slag_1 + Slag_2 + Slag_3 + Slag_4),s);
Znamena_W_s = collect((s-s1)*(s-s2)*((s+alfa)^2+beta^2)*(s-s5),s);
W_s = collect(simplify(Koeff(1)/(s-s1)+Koeff(2)/(s-s2)+(Koeff(4)*s+Koeff(5))/((s+alfa)^2+beta^2)+Koeff(3)/(s-s5)),s)
pretty(W_s)
%Расчет матриц состояния
A = [s1 0 0 0 0;
0 s2 0 0 0 ;
0 0 0 1 0;
0 0 -(alfa^2+beta^2) -2*alfa 0;
0 0 0 0 s5]
B = [Koeff(1); Koeff(2); 0; 1; Koeff(3)]
C = [1 1 Koeff(5) Koeff(4) 1]
%Проверка
W_s = collect(simplify(C*(s.*eye(5)-A)^(-1)*B),s)
pretty(W_s)
%ВСЕ ПОДСЧИТАНО ВЕРНО!!!
SimplexMetod2.mfunction SimplexMetod2
clc
clear all
close all
format short
% Матрицы системы
A = [0 2;
-3 0];
B = [0; 2];
% Координаты начальной и конечной точки
X_0 = [14; 0];
X_N = [0; 0];
% Ограничение на управление
u_m = -3;
u_p = 5;
eps = 1e-10;% погрешность сравнения с нулем
N = 195;% число шагов
%h = t1/N;% шаг дискретизации
h = 0.0162;
alfa = 1;
a = 0;
b = 0;
%t1 = 796/245;% время перехода в конечное состояние
n = size(A);
n = n(1);% порядок системы
% Нахождение матричного экспоненциала
syms s t
MatrEx = ilaplace((s*eye(n)-A)^(-1));
MatrEx_B = MatrEx*B;
% Вычисление матриц F и G
F = subs(MatrEx, t, h);
G = double(int(MatrEx_B, t, 0, h));
ФОРМИРОВАНИЕ ЗАДАЧИ БЫСТРОДЕЙСТВИЯ КАК ЗАДАЧИ
ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
for index = 1 : 1e+10
% Вычисление правой части
PravChast = X_N - F^N * X_0;
% Вычисление произведения F на G
FG = zeros(n, N);% формирование матрицы для хранения данных
for j = 1 : n
for i = 0 : N - 1
fg = F^(N-i-1) * G;
if PravChast(j) < 0
fg = -fg;
end
FG(j, i+1) = fg(j);
end
end
% Построение z-строки
z_stroka = zeros(1, 4*N+n+2);% формирование матрицы для хранения данных
% Первый элемент z-строки
z_stroka(1) = 1;
% Суммирование правых частей
for j = 1 : n
z_stroka(4*N+n+2) = z_stroka(4*N+n+2) + abs(PravChast(j));
end
% Формирование элементов z-строки между 1-м и последним элементами
%при 2N небазисных переменных, т.е. при управлениях
for i = 2 : 2 : 2 * N
for j = 1 : n
z_stroka(i) = z_stroka(i) + FG(j, i/2);
end
for j = 1 : n
z_stroka(i+1) = z_stroka(i+1) - FG(j, i/2);
end
end
% Формирование симплекс-таблицы
CT = zeros(n+2*N+1, 4*N+n+2);
% Построение симплекс-таблицы начиная с z-строки
CT(1,:) = z_stroka(1,:);
% Формирование R-строк в симплекс-таблице
for j = 2 : n + 1
% Формирование правой части в R-строках
CT(j, 4*N+n+2) = abs(PravChast(j-1));
% Формирование элементов R-строк между 1-м и последним элементами
%при 2N небазисных переменных, т.е. при управлениях
for i = 2 : 2 : 2 * N
CT(j, i) = FG(j-1, i/2);
CT(j, i+1) = -FG(j-1, i/2);
end
end
% Формирование S-строк в симплекс-таблице
l = 2;
for j = n + 2 : 2 : n + 2 * N + 1
% Формирование правой части в S-строках
CT(j, 4*N+n+2) = u_p;
CT(j+1, 4*N+n+2) = abs(u_m);
% Формирование элементов S-строк между 1-м и последним элементами
%при 2N небазисных переменных, т.е. при управлениях
CT(j, l : l+1) = [1 -1];
CT(j+1, l : l+1) = [-1 1];
l = l + 2;
end
% Формирование базиса в симплекс-таблице, т.е коэффициентов, стоящих при
%базисных переменных от 2N небазисных переменных до правой части (до 4*N+n+1)
CT(2 : n+2*N+1, 2*N+2 : 4*N+n+1) = eye(n+2*N, n+2*N);
РЕШЕНИЕ ЗАДАЧИ БЫСТРОДЕЙСТВИЯ
% Цикл смены базисных переменных
nn = size(find(CT(1,2:2*N+1) >= eps));
while nn > 0
[znach, N_stolb] = max(CT(1, 2 : 2*N+1));
N_stolb = N_stolb + 1; % т.к. при небазисн. перемен.
PravChast = CT(:, 4*N+n+2);
for j = 2 : n + 2 * N + 1
if CT(j, N_stolb) > 0
PravChast(j) = PravChast(j) / CT(j, N_stolb);
else
PravChast(j) = inf;
end
end
[znach, N_str] = min(PravChast(2 : n+2*N+1));
N_str = N_str + 1;
% Формирование матрицы перехода B
B = eye(n+2*N+1, n+2*N+1);
B(:, N_str) = CT(:, N_stolb);
% Обращение матрицы B
RE = B(N_str, N_str);
for j = 1 : n + 2 * N + 1
if j == N_str
B(j, N_str) = 1 / RE;
else
B(j, N_str) = -B(j, N_str) / RE;
end
end
%B = inv(B);
% Получение новой симплекс таблицы
CT = B * CT;
nn = size(find(CT(1,2:2*N+1) >= eps));
end
u = zeros(1,N);
% Формирование управления
for j = 2 : n + 2 * N + 1
for i = 2 : 2 * N + 1
if CT(j, i) >= eps
if mod(i, 2) < eps
u(i/2) = CT(j, 4*N+n+2);
else
u((i-1)/2) = -CT(j, 4*N+n+2);
end
end
end
end
% Формирование x1 и x2
X = zeros(n, N);
X(:, 1) = F * X_0 + G * u(1);
for i = 2 : N
X(:, i) = F * X(:, i-1) + G * u(i);
end
% Объединение с начальными условиями
X1 = [X_0(1) X(1, :)];
X2 = [X_0(2) X(2, :)];
% проверка на окончание выбора количества шагов
XX = [X_0 X];
% Вычисление нормы вектора состояния
normaXX = norm(XX(:,N))
% Вычисление значения переменной R
R = abs(X_N - F^N * X_0) - FG * u';
R = R';
z = sum(R);
% Погрешность приближения к точному решению
pogresh = 0.3;
if (normaXX < pogresh)
N_opt = N;
break;
else
if (z > h)
if a == 1
alfa = ceil(alfa/2);
end
N = N + alfa;
a = 0;
b = 1;
else
if b == 1
alfa = ceil(alfa/2);
end
N = N - alfa;
a = 1;
b = 0;
end
end
t_perevoda = N * h;
end
N_opt
h
t_perevoda
ОФОРМЛЕНИЕ ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
В ГРАФИЧЕСКОМ ВИДЕ
% Построение графика x1(t);
figure(1)
t = (0 : 1 : length(X1)-1) * h;
plot(t, X1, 'b', 'LineWidth', 2);
hl=legend('x_1(t)');
set(hl, 'FontName', 'Courier');
xlabel('t, cek'); ylabel('x_1(t)');
grid on
% Построение графика x2(t);
figure(2)
t = (0 : 1 : length(X2)-1) * h;
plot(t, X2, 'b', 'LineWidth', 2);
hl=legend('x_2(t)');
set(hl, 'FontName', 'Courier');
xlabel('t, cek'); ylabel('x_2(t)');
grid on
% Построение графика x2 = x2(x1);
figure(3)
plot(X1, X2, 'm', 'LineWidth', 2);
hl=legend('x_2 = x_2(x_1)');
set(hl, 'FontName', 'Courier');
xlabel('x_1(t)'); ylabel('x_2(x_1(t))');
grid on
% Построение графика u(t)
figure(4)
t = (0 : 1 : length(u)-1) * h;
plot(t, u, 'r', 'LineWidth', 2);
hl=legend('u(t)');
set(hl, 'FontName', 'Courier');
xlabel('t, cek'); ylabel('u(t)');
grid on
Optimal_L_problem_moments.mclc
close all
clear all
format long
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% Порядок системы
poryadok = 5;
% Начальные и конечные условия относительно вектора Y
Y_0 = [3 2 1 5]';
Y_T = [0 -1 0 3]';
% Конечное время перехода
T = 3;
% Матрица перехода от Н.У. Y к Н.У. X
B_ = [b0 b1 0 0 0;
0 b0 b1 0 0;
0 0 b0 b1 0;
0 0 0 b0 b1];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Начальные условия для упорядоченной системы
X_0 = B_' * inv(B_ * B_') * Y_0
X_T = B_' * inv(B_ * B_') * Y_T
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4]
B = [0; 0; 0; 0; 1]
C = [b0 b1 0 0 0]
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Вычисление матричной экспоненты
syms s t
MatrEx = simplify (vpa(ilaplace(inv(s*eye(5) - A)), 50))
% ------------------------------------------------------------------------%
RETURN = 1;
while RETURN == 1
disp('L - проблема моментов в пространстве вход-выход: 1')
disp('L - проблема моментов в пространстве состояний : 2')
reply = input('Выберете метод решения [1 или 2]: ', 's');
switch reply
case '1'
disp('L - проблема моментов в пространстве вход-выход')
% ------------------------L - проблема моментов---------------------------%
% ----------------------в пространстве вход-выход-------------------------%
% ------------------------------------------------------------------------%
% Передаточная функция
W_obj_s = 1/(a5*s^5 + a4*s^4 + a3*s^3 + a2*s^2 + a1*s + a0);
% Полюса передаточной функции
polyusa_TF = roots([a5 a4 a3 a2 a1 a0]);
% ИПФ
K_t = simplify (vpa (ilaplace(1 / (a5*s^5 + a4*s^4 + a3*s^3 + ...
a2*s^2 + a1*s + a0)),50))
% K_t = vpa(K_t,6)
% ------------------------------------------------------------------------%
% Составление матрицы Вронского
for i = 1 : poryadok
Matrix_Vron (i, 1) = diff (exp (polyusa_TF(1) *t), t, i - 1);
Matrix_Vron (i, 2) = diff (exp (polyusa_TF(2) *t), t, i - 1);
Matrix_Vron (i, 3) = diff (exp (real(polyusa_TF(3))*t) * ...
cos(imag(polyusa_TF(3))*t), t, i - 1);
Matrix_Vron (i, 4) = diff (exp (real(polyusa_TF(4))*t) * ...
sin(imag(polyusa_TF(4))*t), t, i - 1);
Matrix_Vron (i, 5) = diff (exp (polyusa_TF(5) *t), t, i - 1);
end
% Матрица Вронского при t = 0;
Matrix_Vron_t_0 = double(subs(Matrix_Vron,t,0));
% Матрица Вронского при t = T;
T = 3;
Matrix_Vron_t_T = double(subs(Matrix_Vron,t,T));
% vpa(Matrix_Vron_t_0,6)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Определение неизвестных коэффициентов C
C_ = inv(Matrix_Vron_t_0) * X_0;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение моментных функций
K_Tt_1 = subs (K_t,t, T - t);
K_Tt = diff (K_t);
K_Tt_2 = subs (K_Tt, t, T - t);
K_Ttt = diff (K_Tt);
K_Tt_3 = subs (K_Ttt, t, T - t);
K_Tttt = diff (K_Ttt);
K_Tt_4 = subs (K_Tttt, t, T - t);
K_Ttttt = diff (K_Tttt);
K_Tt_5 = subs (K_Ttttt, t, T - t);
h1_Tt = K_Tt_1
h2_Tt = K_Tt_2
h3_Tt = K_Tt_3
h4_Tt = K_Tt_4
h5_Tt = K_Tt_5
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение моментов
for i = 1 : poryadok
Matrix_a(i) = X_T(i) - C_' * Matrix_Vron_t_T(i,:)';
end
Matrix_a = Matrix_a'
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
RETURN = 2;
case '2'
disp('L - проблема моментов в пространстве состояний')
% ------------------------L - проблема моментов---------------------------%
% ----------------------в пространстве состояний--------------------------%
% ------------------------------------------------------------------------%
Matr_Ex_T = subs(MatrEx, t, T);
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение моментов
for i = 1 : poryadok
Matrix_a(i) = X_T(i) - Matr_Ex_T(i,:) * X_0;
end
Matrix_a = Matrix_a'
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение моментных функций
Matr_Ex_Tt = subs(MatrEx, t, T - t);
h_Tt = vpa(expand(simplify(Matr_Ex_Tt * B)),50);
h1_Tt = h_Tt(1)
h2_Tt = h_Tt(2)
h3_Tt = h_Tt(3)
h4_Tt = h_Tt(4)
h5_Tt = h_Tt(5)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
RETURN = 2;
otherwise
disp('Неизвестный метод.')
RETURN = 1;
end
end
% h1_Tt = vpa(h1_Tt,6)
% h2_Tt = vpa(h2_Tt,6)
% h3_Tt = vpa(h3_Tt,6)
% h4_Tt = vpa(h4_Tt,6)
% h5_Tt = vpa(h5_Tt,6)
% ------------------------------------------------------------------------%
% --------Нахождение управления и вычисление минимальной энергии----------%
% ------------------------------------------------------------------------%
syms ks1 ks2 ks3 ks4 ks5
% ------------------------------------------------------------------------%
% Формирование функционала
d_v_2 = vpa (simplify (int ((ks1*h1_Tt + ks2*h2_Tt + ks3*h3_Tt + ...
ks4*h4_Tt + ks5*h5_Tt)^2, t, 0, T)), 50);
% Выражаем ks1 через остальные
ks1 = vpa ((1 - ks2*Matrix_a(2) - ks3*Matrix_a(3) - ...
ks4*Matrix_a(4) - ks5*Matrix_a(5))/Matrix_a(1), 50);
% Подставляем в функционал ks1
d_v_2 = vpa (expand (subs (d_v_2, ks1)), 50);
% Находим частные производные по ksi
eq_1= diff(d_v_2, ks2);
eq_2= diff(d_v_2, ks3);
eq_3= diff(d_v_2, ks4);
eq_4= diff(d_v_2, ks5);
% Решаем СЛАУ относительно ksi
ksi= solve(eq_1, eq_2, eq_3, eq_4);
% Полученные значения ksi
ks2= double(ksi.ks2)
ks3= double(ksi.ks3)
ks4= double(ksi.ks4)
ks5= double(ksi.ks5)
ks1 = double(vpa ((1 -ks2*Matrix_a(2) -ks3*Matrix_a(3) -ks4*Matrix_a(4) - ...
ks5*Matrix_a(5))/Matrix_a(1), 50))
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Проверка условия полученного результата
ks1*Matrix_a(1) + ks2*Matrix_a(2) + ks3*Matrix_a(3) + ...
ks4*Matrix_a(4) + ks5*Matrix_a(5)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Вычисление управления и минимальной энергии
d_v_2 = vpa (simplify (int ((ks1*h1_Tt + ks2*h2_Tt + ks3*h3_Tt + ...
ks4*h4_Tt + ks5*h5_Tt)^2, t, 0, T)), 50)
% d_v_2 = double(d_v_2)
gamma_v_2 = 1/d_v_2
% gamma_v_2 = double(gamma_v_2)
u = vpa (expand(simplify(gamma_v_2 * (ks1*h1_Tt + ks2*h2_Tt + ks3*h3_Tt + ...
ks4*h4_Tt + ks5*h5_Tt))), 50)
% u = vpa(u,6)
u_0 = subs(u,t,0)
u_T = subs(u,t,T)
ezplot(u, [0 T], 1)
hl=legend('u(t)');
set(hl, 'FontName', 'Courier');
title ('u(t)');
xlabel('t')
grid on
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождения X
% Вычисление матричной экспоненты
MatrEx = simplify (vpa(ilaplace(inv(s*eye(5) - A)), 50));
syms t tay
X_svob = MatrEx * X_0;
X_vinyg = int ((subs(MatrEx, t, t - tay))*B*(subs (u, t, tay)), tay, 0,t);
X_real = X_svob + X_vinyg;
save Sostoyaniya X_real u
X_real = vpa (expand (simplify(X_real)), 50)
X_real_0 = double(subs (X_real, t, 0))
X_real_T = double(subs (X_real, t, T))
% Погрешность X
delta_X_T = double(vpa(X_T - X_real_T, 50))
delta_X_0 = double(vpa(X_0 - X_real_0, 50))
% Нахождение Y
for i = 1 : poryadok - 1
Y_real(i) = B_(i,:) * X_real;
end
Y_real = vpa (expand(simplify(Y_real')), 50)
Y_real_0 = double(subs (Y_real, t, 0))
Y_real_T = double(subs (Y_real, t, T))
% Погрешность Y
delta_Y_T = double(vpa(Y_T - Y_real_T, 50))
delta_Y_0 = double(vpa(Y_0 - Y_real_0, 50))
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Вычисление max значений для задачи АКОР
h = 0.01;
tic
tt = 0 : h : T;
for i = 1 : poryadok
X_max(i) = max(abs(subs(X_real(i),t,tt)));
end
U_max = max(abs(subs(u,t,tt)));
toc
save Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Построение результатов X(t)
ezplot (X_real(1), [0 T],2)
title ('x_1(t)');
grid on
ezplot (X_real(2), [0 T],3)
title ('x_2(t)');
grid on
ezplot (X_real(3), [0 T],4)
title ('x_3(t)');
grid on
ezplot (X_real(4), [0 T],5)
title ('x_4(t)');
grid on
ezplot (X_real(5), [0 T],6)
title ('x_5(t)');
grid on
% Построение результатов Y(t)
ezplot (Y_real(1), [0 T],7)
title ('y_1(t)');
grid on
ezplot (Y_real(2), [0 T],8)
title ('y_2(t)');
grid on
ezplot (Y_real(3), [0 T],9)
title ('y_3(t)');
grid on
ezplot (Y_real(4), [0 T],10)
title ('y_4(t)');
grid on
% ------------------------------------------------------------------------%
Gramian_Uprav.m
clc
close all
clear all
format long
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% Порядок системы
poryadok = 5;
% Начальные и конечные условия относительно вектора Y
Y_0 = [3 2 1 5]';
Y_T = [0 -1 0 3]';
% Конечное время перехода
T = 3;
% Матрица перехода от Н.У. Y к Н.У. X
B_ = [b0 b1 0 0 0;
0 b0 b1 0 0;
0 0 b0 b1 0;
0 0 0 b0 b1];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Начальные условия для упорядоченной системы
X_0 = B_' * inv(B_ * B_') * Y_0
X_T = B_' * inv(B_ * B_') * Y_T
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
B = [0; 0; 0; 0; 1];
C = [b0 b1 0 0 0];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Вычисление матричной экспоненты
syms s t
MatrEx = simplify (vpa(ilaplace(inv(s*eye(5) - A)), 50));
MatrEx_T = vpa(subs(MatrEx, t, T),50);
MatrEx_Tt = vpa(subs(MatrEx, t, T-t),50);
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Вычисление матрицы управляемости
M_c = [B A*B A^2*B A^3*B A^4*B]
rank_M_c = rank(M_c); %ранк = 5 - система управляема
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Вычисление грамиана управляемости
W_Tt = double(vpa(simplify(int(MatrEx_Tt*B*B'*MatrEx_Tt',t,0,T)),50))
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Формирование управления
u = vpa(expand(simplify(B'*MatrEx_Tt'*inv(W_Tt)*(X_T-MatrEx_T*X_0))),50)
u_0 = subs(u,t,0)
u_T = subs(u,t,T)
u = vpa(u,6)
% ------------------------------------------------------------------------%
ezplot(u, [0 T], 1)
title ('u(t)');
xlabel('t')
grid on
tt = 0 : 0.01 : T;
u2 = -20.605579750692850622177761310569*exp(-40.749492463732569440253455897187+13.583164154577523146751151965729*t)+19.011167813350479567880663060491*exp(-2.0544534472800777280645828326668+.68481781576002590935486094422228*t)+1.3356706538317879679656856470126*exp(-1.7550088311372150108106250409710+.58500294371240500360354168032368*t)*cos(-8.3032397968812277095785721047505+2.7677465989604092365261907015835*t)+7.2830359327562658520685140088852*exp(-1.7550088311372150108106250409710+.58500294371240500360354168032368*t)*sin(-8.3032397968812277095785721047505+2.7677465989604092365261907015835*t)-8.6096491449877801097840179781687;
u1 = subs(u2, t, tt);
u2 = subs(u, t, tt);
figure(2)
plot(tt,u1,'r',tt,u2,'b','LineWidth',2)
hl=legend('u(t) при решении оптимальной L-проблемы моментов','u(t) с использованием грамиана управляемости');
set(hl, 'FontName', 'Courier');
xlabel('t, cek'); ylabel('u(t)');
title('u(t)')
grid on
AKOR_stabilizaciya_na_polybeskon_interval.mclc
clear all
close all
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0;
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4]
B = [0; 0; 0; 0; 1]
C = [b0 b1 0 0 0]
% Начальные условия
X_0 = [10; 0; 6; 4; 8]
%T = 1;
Time = 1;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
r(1) = 0.1;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q)
R = diag(r)
% Для изменения коэффициентов
% Q(1,1) = Q(1,1);
% Q(2,2) = Q(2,2);
% Q(3,3) = Q(3,3);
% Q(4,4) = Q(4,4);
% Q(5,5) = Q(5,5);
Q(1,1) = Q(1,1)*1e+12;
Q(2,2) = Q(2,2)*1e+8;
Q(3,3) = Q(3,3)*1e+7;
Q(4,4) = Q(4,4)*1e+0;
Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом диагонализации
P1 = Solve_Riccati_Method_Diag(A,B,Q,R)
% ------------------------------------------------------------------------%
P_nach = zeros(poryadok, poryadok);%+ones(poryadok, poryadok);
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P2 = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time,poryadok, P_nach)
% ------------------------------------------------------------------------%
% Сравнение расхождения методов
Delta_P = abs(P1-P2)
% Построение графика коэффициентов регулятора
load Solve_Riccati_Method_Revers_Integr Time_R P N_str
PP = P;
for i = 1 : N_str
P = reshape(PP(i, :), poryadok, poryadok);
K(i, :) = -inv(R)*B'*P;
end
figure(2)
plot(Time_R,K(:,1),'-',Time_R,K(:,2),'-',Time_R,K(:,3),'-',Time_R,K(:,4),'-',Time_R,K(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты обратной связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_о_с','k_2_о_с','k_3_о_с','k_4_о_с','k_5_о_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
% Решение уравнения Риккати с помощью встроенной функции
% P = vpa(care(A,B,Q,R), 10)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение коэффициентов регулятора
disp('Коэффициенты регулятора:')
K1 = -inv(R) * B' * P1
K2 = -inv(R) * B' * P2
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
A1_ = A + B * K1;
A2_ = A + B * K2;
% Вычисление матричной экспоненты
syms s t
MatrEx1 = simplify (vpa(ilaplace(inv(s*eye(5) - A1_)), 50));
MatrEx2 = simplify (vpa(ilaplace(inv(s*eye(5) - A2_)), 50));
% Нахождение координат состояния
X1 = vpa(simplify(MatrEx1 * X_0), 50);
X2 = vpa(simplify(MatrEx2 * X_0), 50);
% Нахождение управления
u1 = vpa(simplify(K1 * X1),50)
u2 = vpa(simplify(K2 * X2),50)
% ------------------------------------------------------------------------%
% Построение u(t) и X(t)
T_sravneniya = 0.2;
figure(3);
tt = 0 : 0.01 : T_sravneniya;
uu1 = subs(u1,t,tt);
uu2 = subs(u2,t,tt);
plot(tt, uu1, tt, uu2, 'LineWidth', 2)
title ('u(t)');
xlabel('t')
hl=legend('u(t) - управление',0);
set(hl,'FontName','Courier');
grid on
ezplot(X1(1), [0 Time], 4)
hold on
title ('x_1(t)');
xlabel('t')
grid on
ezplot(X1(2), [0 Time], 5)
title ('x_2(t)');
xlabel('t')
grid on
ezplot(X1(3), [0 Time], 6)
title ('x_3(t)');
xlabel('t')
grid on
ezplot(X1(4), [0 Time], 7)
title ('x_4(t)');
xlabel('t')
grid on
ezplot(X1(5), [0 Time], 8)
title ('x_5(t)');
xlabel('t')
grid on
tt = 0 : 0.01 : T_sravneniya;
X21 = subs(X1(1), t, tt);
X22= subs(X1(2), t, tt);
X23= subs(X1(3), t, tt);
X24= subs(X1(4), t, tt);
X25= subs(X1(5), t, tt);
save Sravnenie_stabilizacii_1 X21 X22 X23 X24 X25 uu1
AKOR_stabilizaciya_na_konech_interval.mclc
clear all
close all
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
B = [0; 0; 0; 0; 1];
C = [b0 b1 0 0 0];
% Начальные условия
X_0 = [10; 0; 6; 4; 8];
Time = 0.2;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
% r(1) = 100;
r(1) = 0.1;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q);
R = diag(r);
% Для изменения коэффициентов
Q(1,1) = Q(1,1)*1e+12;
Q(2,2) = Q(2,2)*1e+8;
Q(3,3) = Q(3,3)*1e+7;
Q(4,4) = Q(4,4)*1e+0;
Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% P_prib = eye(poryadok, poryadok);
% P_prib(1,1) = 100;
% P_prib(2,2) = 10;
% % P_prib(3,3) = 1000;
% % P_prib(4,4) = 10;
% % P_prib(5,5) = 1;
% ------------------------------------------------------------------------%
P_nach = zeros(poryadok, poryadok);% + P_prib;
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time,poryadok, P_nach)
% ------------------------------------------------------------------------%
% Нахождение переменных коэффициентов регулятора
load Solve_Riccati_Method_Revers_Integr Time_R P N_str
PP = P;
for i = 1 : N_str
P = reshape(PP(i, :), poryadok, poryadok);
K(i, :) = -inv(R)*B'*P;
end
% ------------------------------------------------------------------------%
% Формирование вектора коэффициентов регулятора
% и решения уравнения Риккати в прямом порядке
load Solve_Riccati_Method_Revers_Integr P
size(K)
i = 1;
len_K = length(K(:,1))
for j = len_K : -1 : 1
K_pr(i,:) = K(j,:);
i = i + 1;
end
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора в прямом времени
figure(2)
plot(Time_R,K(:,1),'-',Time_R,K(:,2),'-',Time_R,K(:,3),'-',...
Time_R,K(:,4),'-',Time_R,K(:,5),'-', 'LineWidth', 2);
grid on;
title('K(t)')
xlabel('t')
legend('k_1','k_2','k_3','k_4','k_5');
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
for k = 1 : len_K
A_(:,:,k) = A + B * K(k,:);
end
size(A_);
% ------------------------------------------------------------------------%
% Нахождение фазовых координат
X(:,1) = X_0;
h = 0.01;
time_X(1) = 0;
for k = 1 : len_K
X(:, k+1) = X(:, k) + h * A_(:,:,k) * X(:, k);
time_X(k+1) = time_X(k) + h;
end
X(:, k+1) = [];
time_X(k+1) = [];
% ------------------------------------------------------------------------%
% Нахождение управления
for k = 1 : len_K
u(k) = K_pr(k,:) * X(:,k);
end
% ------------------------------------------------------------------------%
% Построение u(t) и X(t)
figure(3);
plot(time_X, u, 'r-', 'LineWidth', 2)
title ('u(t)');
xlabel('t')
grid on
figure(4);
plot(time_X, X(1,:), 'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t')
grid on
figure(5);
plot(time_X, X(2,:), 'LineWidth', 2)
title ('x_2(t)');
xlabel('t')
grid on
figure(6);
plot(time_X, X(3,:), 'LineWidth', 2)
title ('x_3(t)');
xlabel('t')
grid on
figure(7);
plot(time_X, X(4,:), 'LineWidth', 2)
title ('x_4(t)');
xlabel('t')
grid on
figure(8);
plot(time_X, X(5,:), 'LineWidth', 2)
title ('x_5(t)');
xlabel('t')
grid on
save Sravnenie_stabilizacii_2 time_X X u
Sravnenie_stabilizacii.mclose all
load Sravnenie_stabilizacii_1 X21 X22 X23 X24 X25 uu1
load Sravnenie_stabilizacii_2 time_X X u
figure(31);
plot(time_X, u, time_X, uu1, 'LineWidth', 2)
title ('u(t)');
xlabel('t')
hl=legend('u(t) - управление с перемен. коеф.','u(t) - управление с пост. коеф.');
set(hl,'FontName','Courier');
grid on
figure(41);
plot(time_X, X(1,:), time_X, X21, 'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t')
hl=legend('x_1(t) - с перемен. коеф.','x_1(t) - с пост. коеф.');
set(hl,'FontName','Courier');
grid on
figure(51);
plot(time_X, X(2,:), time_X, X22,'LineWidth', 2)
title ('x_2(t)');
xlabel('t')
hl=legend('x_2(t) - с перемен. коеф.','x_2(t) - с пост. коеф.');
set(hl,'FontName','Courier');
grid on
figure(61);
plot(time_X, X(3,:), time_X, X23,'LineWidth', 2)
title ('x_3(t)');
xlabel('t')
hl=legend('x_3(t) - с перемен. коеф.','x_3(t) - с пост. коеф.');
set(hl,'FontName','Courier');
grid on
figure(71);
plot(time_X, X(4,:), time_X, X24,'LineWidth', 2)
title ('x_4(t)');
xlabel('t')
hl=legend('x_4(t) - с перемен. коеф.','x_4(t) - с пост. коеф.');
set(hl,'FontName','Courier');
grid on
figure(81);
plot(time_X, X(5,:), time_X, X25,'LineWidth', 2)
title ('x_5(t)');
xlabel('t')
hl=legend('x_5(t) - с перемен. коеф.','x_5(t) - с пост. коеф.');
set(hl,'FontName','Courier');
grid on
AKOR_stabilizaciya_pri_vozmusheniyah.mclc
clear all
close all
warning off
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
B = [0; 0; 0; 0; 1];
C = [b0 b1 0 0 0];
% Начальные условия
X_0 = [10; 0; 6; 4; 8];
Time = 1;
h = 0.01;
% ------------------------------------------------------------------------%
tic
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
r(1) = 100;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q);
R = diag(r);
% Для изменения коэффициентов
Q(1,1) = Q(1,1)*1e+12;
Q(2,2) = Q(2,2)*1e+8;
Q(3,3) = Q(3,3)*1e+7;
Q(4,4) = Q(4,4)*1e+0;
Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% P_0 = ones(poryadok, poryadok);
% P_0(1,1) = P_0(1,1)*1e12;
% P_0(2,2) = P_0(2,2)*1e8;
% P_0(3,3) = P_0(3,3)*1e7;
% P_0(4,4) = P_0(4,4)*1e0;
% P_0(5,5) = P_0(5,5)*1e2;
% ------------------------------------------------------------------------%
P_nach = zeros(poryadok, poryadok);%+P_0;
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time,poryadok, P_nach);
load Solve_Riccati_Method_Revers_Integr_for_slegenie Time_R P N_str
PP = P;
for k = 1 : N_str
P1 = reshape(PP(k, :), poryadok, poryadok);
for i = 1 : poryadok
for j = 1 : poryadok
P2(i,j,k) = P1(i,j);
end
end
end
size_P = size(P2);
% ------------------------------------------------------------------------%
tic
% ------------------------------------------------------------------------%
% Получение дискретных значений задающего воздействия в обратном времени
% для нахождения вспомогательной функции q(t)
Vozmyshyayushee_Vozdeistvie_Discrete_Revers(h, 0, Time);
% ------------------------------------------------------------------------%
load Vozmyshyayushee_Vozdeistvie_Discrete_Revers w_discrete_rev
% ------------------------------------------------------------------------%
size(w_discrete_rev);
% Начальное значение q(t)
q = zeros(poryadok,1);
% Интегрирование q(t) в обратном времени
for k = 1 : N_str
q(:, k+1) = q(:, k) - h * ((P2(:,:,k)*B*inv(R)*B'-A') * q(:, k) - P2(:,:,k)*w_discrete_rev(:,k));
end
q(:, k+1) = [];
size_q = size(q);
% ------------------------------------------------------------------------%
% Нахождение переменных коэффициентов регулятора
for k = 1 : N_str
K_o(k, :) = -inv(R) * B' * P2(:,:,k);
K_pr(k, :) = -inv(R) * B';
end
% Формирование вектора коэффициентов регулятора, значений задающего
% воздействия, значений вспомогательной функции в прямом порядке
size(K_o);
size(K_pr);
K_pr_p = K_pr;
i = 1;
len_K = length(K_o(:,1));
for j = len_K : -1 : 1
K_o_p(i,:) = K_o(j,:);
w_discrete(:,i) = w_discrete_rev(:,j);
q_pr(:, i) = q(:, j);
i = i + 1;
end
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора обратной связи
% в прямом времени
toc
figure(3)
plot(Time_R,K_o(:,1),'-',Time_R,K_o(:,2),'-',Time_R,K_o(:,3),'-',...
Time_R,K_o(:,4),'-',Time_R,K_o(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты обратной связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_о_с','k_2_о_с','k_3_о_с','k_4_о_с','k_5_о_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора прямой связи
% в прямом времени
figure(4)
plot(Time_R,K_pr(:,1),'-',Time_R,K_pr(:,2),'-',Time_R,K_pr(:,3),'-',...
Time_R,K_pr(:,4),'-',Time_R,K_pr(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты прямой связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_п_с','k_2_п_с','k_3_п_с','k_4_п_с','k_5_п_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
tic
% ------------------------------------------------------------------------%
for k = 1 : len_K
A_(:,:,k) = A + B * K_o_p(k,:);
end
size_A_ = size(A_);
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение фазовых координат
X(:,1) = X_0;
time_X(1) = 0;
for k = 1 : len_K
X(:, k+1) = X(:, k) + h * (A_(:,:,k) * X(:, k) + B * K_pr_p(k,:) * q_pr(:,k) + w_discrete(:,k));
time_X(k+1) = time_X(k) + h;
end
X(:, k+1) = [];
time_X(k+1) = [];
size_X = size(X);
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение управления
for k = 1 : len_K
u(k) = K_o_p(k,:) * X(:,k) + K_pr_p(k,:) * q_pr(:,k);
end
size_u = size(u);
% ------------------------------------------------------------------------%
toc
% Построение u(t) и X(t)
figure(5);
plot(time_X, u, 'r-', 'LineWidth', 2)
title ('u(t)');
xlabel('t')
hl=legend('u(t) - управление',0);
set(hl,'FontName','Courier');
grid on
figure(6);
plot(time_X, X(1,:),'r-', time_X, w_discrete(1,:), 'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t');
hl=legend('X(t) - реальный сигнал','w(t) - возмущающее воздействие',0);
set(hl,'FontName','Courier');
grid on
figure(7);
plot(time_X, X(2,:),'r-', time_X, w_discrete(2,:), 'LineWidth', 2)
title ('x_2(t)');
xlabel('t');
hl=legend('X(t) - реальный сигнал','w(t) - возмущающее воздействие',0);
set(hl,'FontName','Courier');
grid on
figure(8);
plot(time_X, X(3,:),'r-', time_X, w_discrete(3,:), 'LineWidth', 2)
title ('x_3(t)');
xlabel('t');
hl=legend('X(t) - реальный сигнал','w(t) - возмущающее воздействие',0);
set(hl,'FontName','Courier');
grid on
figure(9);
plot(time_X, X(4,:),'r-', time_X, w_discrete(4,:), 'LineWidth', 2)
title ('x_4(t)');
xlabel('t');
hl=legend('X(t) - реальный сигнал','w(t) - возмущающее воздействие',0);
set(hl,'FontName','Courier');
grid on
figure(10);
plot(time_X, X(5,:),'r-', time_X, w_discrete(5,:), 'LineWidth', 2)
title ('x_5(t)');
xlabel('t');
hl=legend('X(t) - реальный сигнал','w(t) - возмущающее воздействие',0);
set(hl,'FontName','Courier');
grid on
figure(11);
plot(time_X, q(1,:), time_X, q(2,:), time_X, q(3,:), time_X, q(4,:), time_X, q(5,:), 'LineWidth', 2)
title ('q(t)- vector-function');
xlabel('t');
hl=legend('q_1(t)', 'q_2(t)', 'q_3(t)', 'q_4(t)', 'q_5(t)');
set(hl,'FontName','Courier');
grid on
AKOR_slegenie_na_konech_interval_I_podxod.mclc
clear all
close all
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
B = [0; 0; 0; 0; 1];
C = [b0 b1 0 0 0];
% Начальные условия
X_0 = [10; 0; 6; 4; 8;];
Time = 1;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
r(1) = 100;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q);
R = diag(r);
% Для изменения коэффициентов
% Q(1,1) = Q(1,1)*1e+10;
% Q(2,2) = Q(2,2)*1e+8;
% Q(3,3) = Q(3,3)*1e+6;
% Q(4,4) = Q(4,4)*1e+2;
% Q(5,5) = Q(5,5)*1e+2;
Q(1,1) = Q(1,1)*1e+12;
Q(2,2) = Q(2,2)*1e+8;
Q(3,3) = Q(3,3)*1e+7;
Q(4,4) = Q(4,4)*1e+0;
Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% ------------------------------------------------------------------------%
% Задающее воздействие
A_o = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
X_o_0 = [12; 10; 14; 8; 16];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Расширенный вектор состояния и расширенные матрицы A,B,Q
%X_rassh = [X_0; X_o];
NULL_M1 = zeros(size(A));
A_rassh = [A NULL_M1;
NULL_M1 A_o];
NULL_M2 = zeros(length(A(:,1)), 1);
B_rassh = [B; NULL_M2];
Q_rassh = [Q -Q;
-Q Q];
X_rassh_0 = [X_0; X_o_0]
% ------------------------------------------------------------------------%
P_nach = zeros(2*poryadok, 2*poryadok);%+ones(poryadok, poryadok);
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P = Solve_Riccati_Method_Revers_Integr(A_rassh,B_rassh,Q_rassh,R,Time,2*poryadok, P_nach)
% ------------------------------------------------------------------------%
% Нахождение переменных коэффициентов регулятора
load Solve_Riccati_Method_Revers_Integr_for_slegenie Time_R P N_str
% ------------------------------------------------------------------------%
% % Формирование матриц P11 и P12
PP = P;
for k = 1 : N_str
P = reshape(PP(k, :), 2*poryadok, 2*poryadok);
for i = 1 : poryadok
for j = 1 : poryadok
P11(i,j,k) = P(i,j);
end
end
for i = 1 : poryadok
for j = (poryadok+1) : (2*poryadok)
P12(i,j-poryadok,k) = P(i,j);
end
end
end
P11(:,:,k)
P12(:,:,k)
% ------------------------------------------------------------------------%
for k = 1 : N_str
K_o(k, :) = -inv(R) * B' * P11(:,:,k);
K_pr(k, :) = -inv(R) * B' * P12(:,:,k);
end
% Формирование вектора коэффициентов регулятора
% в прямом порядке
size(K_o)
size(K_pr)
i = 1;
len_K = length(K_o(:,1))
for j = len_K : -1 : 1
K_o_p(i,:) = K_o(j,:)
K_pr_p(i,:) = K_pr(j,:);
i = i + 1;
end
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора обратной связи
% в прямом времени
figure(2)
plot(Time_R,K_o(:,1),'-',Time_R,K_o(:,2),'-',Time_R,K_o(:,3),'-',...
Time_R,K_o(:,4),'-',Time_R,K_o(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты обратной связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_о_с','k_2_о_с','k_3_о_с','k_4_о_с','k_5_о_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора прямой связи
% в прямом времени
figure(3)
plot(Time_R,K_pr(:,1),'-',Time_R,K_pr(:,2),'-',Time_R,K_pr(:,3),'-',...
Time_R,K_pr(:,4),'-',Time_R,K_pr(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты прямой связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_п_с','k_2_п_с','k_3_п_с','k_4_п_с','k_5_п_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение отслеживаемого сигнала
X_o(:,1) = X_o_0;
h = 0.01;
for k = 1 : len_K
X_o(:, k+1) = X_o(:, k) + h * A_o * X_o(:, k);
end
X_o(:, k+1) = [];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
for k = 1 : len_K
A_(:,:,k) = A + B * K_o_p(k,:);
end
size(A_)
% ------------------------------------------------------------------------%
% Нахождение фазовых координат
X(:,1) = X_0;
time_X(1) = 0;
for k = 1 : len_K
X(:, k+1) = X(:, k) + h * (A_(:,:,k) * X(:, k) + B * K_pr_p(k,:) * X_o(:,k));
time_X(k+1) = time_X(k) + h;
end
X(:, k+1) = [];
time_X(k+1) = [];
% ------------------------------------------------------------------------%
% Нахождение управления
for k = 1 : len_K
u(k) = K_o_p(k,:) * X(:,k) + K_pr_p(k,:) * X_o(:,k);
end
% ------------------------------------------------------------------------%
% Построение u(t) и X(t)
figure(4);
plot(time_X, u, 'r-', 'LineWidth', 2)
title ('u(t)');
xlabel('t')
hl=legend('u(t) - управление',0);
set(hl,'FontName','Courier');
grid on
figure(5);
plot(time_X, X(1,:),'r-', time_X, X_o(1,:), 'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(6);
plot(time_X, X(2,:),'r-', time_X, X_o(2,:), 'LineWidth', 2)
title ('x_2(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(7);
plot(time_X, X(3,:),'r-', time_X, X_o(3,:), 'LineWidth', 2)
title ('x_3(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(8);
plot(time_X, X(4,:),'r-', time_X, X_o(4,:), 'LineWidth', 2)
title ('x_4(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(9);
plot(time_X, X(5,:),'r-', time_X, X_o(5,:), 'LineWidth', 2)
title ('x_5(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
AKOR_slegenie_na_konech_interval_II_podxod.mclc
clear all
close all
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
B = [0; 0; 0; 0; 1];
C = [b0 b1 0 0 0];
% Начальные условия
X_0 = [10; 0; 6; 4; 8];
Time = 45;
h = 0.01;
H = 0.8;
% ------------------------------------------------------------------------%
tic
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
r(1) = 100;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q);
R = diag(r);
% Для изменения коэффициентов
% Q(1,1) = Q(1,1)*1e+12;
% Q(2,2) = Q(2,2)*1e+8;
% Q(3,3) = Q(3,3)*1e+7;
% Q(4,4) = Q(4,4)*1e+0;
% Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% ------------------------------------------------------------------------%
P_nach = zeros(poryadok, poryadok);%+ones(poryadok, poryadok);
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time,poryadok, P_nach);
load Solve_Riccati_Method_Revers_Integr_for_slegenie Time_R P N_str
PP = P;
for k = 1 : N_str
P1 = reshape(PP(k, :), poryadok, poryadok);
for i = 1 : poryadok
for j = 1 : poryadok
P2(i,j,k) = P1(i,j);
end
end
end
size_P = size(P2)
% ------------------------------------------------------------------------%
tic
% ------------------------------------------------------------------------%
% Получение дискретных значений задающего воздействия в обратном времени
% для нахождения вспомогательной функции q(t)
Zadayushee_Vozdeistvie_Discrete_Revers_Modern(h, 0, Time);
% ------------------------------------------------------------------------%
load Zadayushee_Vozdeistvie_Discrete_Revers X_o_discrete_rev
% ------------------------------------------------------------------------%
size(X_o_discrete_rev);
% Нахождение q(t)
for i = 1 : poryadok
qq = -P_nach(:,:,1) * X_o_discrete_rev(i,1);
q(i,1) = qq(i,1);
end
% Интегрирование q(t) в обратном времени
for k = 1 : N_str
q(:, k+1) = q(:, k) - h * ((P2(:,:,k)*B*inv(R)*B'-A') * q(:, k) + Q*X_o_discrete_rev(:,k));
end
q(:, k+1) = [];
size_q = size(q)
% ------------------------------------------------------------------------%
% Нахождение переменных коэффициентов регулятора
for k = 1 : N_str
K_o(k, :) = -inv(R) * B' * P2(:,:,k);
K_pr(k, :) = -inv(R) * B';
end
% Формирование вектора коэффициентов регулятора, значений задающего
% воздействия, значений вспомогательной функции в прямом порядке
size(K_o);
size(K_pr);
K_pr_p = K_pr;
i = 1;
len_K = length(K_o(:,1));
for j = len_K : -1 : 1
K_o_p(i,:) = K_o(j,:);
X_o_discrete(:,i) = X_o_discrete_rev(:,j);
q_pr(:, i) = q(:, j);
i = i + 1;
end
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора обратной связи
% в прямом времени
toc
figure(3)
plot(Time_R,K_o(:,1),'-',Time_R,K_o(:,2),'-',Time_R,K_o(:,3),'-',...
Time_R,K_o(:,4),'-',Time_R,K_o(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты обратной связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_о_с','k_2_о_с','k_3_о_с','k_4_о_с','k_5_о_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Построение графика переменных коэффициентов регулятора прямой связи
% в прямом времени
figure(4)
plot(Time_R,K_pr(:,1),'-',Time_R,K_pr(:,2),'-',Time_R,K_pr(:,3),'-',...
Time_R,K_pr(:,4),'-',Time_R,K_pr(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты прямой связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_п_с','k_2_п_с','k_3_п_с','k_4_п_с','k_5_п_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
tic
% ------------------------------------------------------------------------%
for k = 1 : len_K
A_(:,:,k) = A + B * K_o_p(k,:);
end
size_A_ = size(A_)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение фазовых координат
X(:,1) = X_0;
time_X(1) = 0;
for k = 1 : len_K
X(:, k+1) = X(:, k) + h * (A_(:,:,k) * X(:, k) + B * K_pr_p(k,:) * q_pr(:,k));
time_X(k+1) = time_X(k) + h;
end
X(:, k+1) = [];
time_X(k+1) = [];
size_X = size(X)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение управления
for k = 1 : len_K
u(k) = K_o_p(k,:) * X(:,k) + K_pr_p(k,:) * q_pr(:,k);
end
size_u = size(u)
% ------------------------------------------------------------------------%
toc
% Построение u(t) и X(t)
figure(5);
plot(time_X, u, 'r-', 'LineWidth', 2)
title ('u(t)');
xlabel('t')
hl=legend('u(t) - управление',0);
set(hl,'FontName','Courier');
grid on
figure(6);
plot(time_X, X(1,:),'r-', time_X, X_o_discrete(1,:), time_X, X_o_discrete(1,:)-0.8,'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон', 'уровень',0);
set(hl,'FontName','Courier');
grid on
figure(7);
plot(time_X, X(2,:),'r-', time_X, X_o_discrete(2,:), 'LineWidth', 2)
title ('x_2(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(8);
plot(time_X, X(3,:),'r-', time_X, X_o_discrete(3,:), 'LineWidth', 2)
title ('x_3(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(9);
plot(time_X, X(4,:),'r-', time_X, X_o_discrete(4,:), 'LineWidth', 2)
title ('x_4(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(10);
plot(time_X, X(5,:),'r-', time_X, X_o_discrete(5,:), 'LineWidth', 2)
title ('x_5(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
AKOR_slegenie_so_skolz_intervalami_Modern.mfunction AKOR_slegenie_so_skolz_intervalami_Modern
clc
clear all
close all
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4];
B = [0; 0; 0; 0; 1];
C = [b0 b1 0 0 0];
% Начальные условия
X_0 = [10; 0; 6; 4; 8];
Time = 45;
Kolvo_intervalov = 3;
h = 0.01;
H = 0.8;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
r(1) = 100;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q);
R = diag(r);
% Для изменения коэффициентов
% Q(1,1) = Q(1,1)*1e+13;
% Q(2,2) = Q(2,2)*1e+10;
% Q(3,3) = Q(3,3)*1e+8;
% Q(4,4) = Q(4,4)*1e+5;
% Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% ------------------------------------------------------------------------%
% ------------------Скользящие интервалы----------------------------------%
shag = Time/Kolvo_intervalov;
Time1 = shag
Time2 = 2*shag
Time3 = Time
% ------------------------------------------------------------------------%
P_nach = zeros(poryadok, poryadok);%+ones(poryadok, poryadok);
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time1,poryadok, P_nach);
load Solve_Riccati_Method_Revers_Integr_for_slegenie Time_R P N_str
PP = P;
for k = 1 : N_str
P1 = reshape(PP(k, :), poryadok, poryadok);
for i = 1 : poryadok
for j = 1 : poryadok
P2(i,j,k) = P1(i,j);
end
end
end
size_P = size(P2)
% ------------------------------------------------------------------------%
% Нахождение переменных коэффициентов регулятора
for k = 1 : N_str
K_o(k, :) = -inv(R) * B' * P2(:,:,k);
K_pr(k, :) = -inv(R) * B';
end
% ------------------------------------------------------------------------%
tic
% 1 интервал
Solve_Interval(P_nach, N_str, h, P2, A,B,Q,R, 0, Time1, X_0, poryadok, K_o, K_pr);
load Solve_Interval time_X X u X_o_discrete
time_X1 = time_X;
X1 = X;
u1 = u;
X_o_discrete1 = X_o_discrete;
% 2 интервал
Solve_Interval(P_nach, N_str, h, P2, A,B,Q,R, Time1, Time2, X1(:,N_str), poryadok, K_o, K_pr);
load Solve_Interval time_X X u X_o_discrete
time_X2 = time_X;
X2 = X;
u2 = u;
X_o_discrete2 = X_o_discrete;
% 3 интервал
Solve_Interval(P_nach, N_str, h, P2, A,B,Q,R, Time2, Time3, X2(:,N_str), poryadok, K_o, K_pr);
load Solve_Interval time_X X u X_o_discrete
time_X3 = time_X;
X3 = X;
u3 = u;
X_o_discrete3 = X_o_discrete;
toc
% ------------------------------------------------------------------------%
% Объединение интервалов
time_X = [time_X1 time_X2 time_X3];
u = [u1 u2 u3];
X = [X1 X2 X3];
X_o_discrete = [X_o_discrete1 X_o_discrete2 X_o_discrete3];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Построение u(t) и X(t)
figure(3);
plot(time_X, u, 'r-','LineWidth', 2);
title ('u(t)');
xlabel('t')
hl=legend('u(t) - управление',0);
set(hl,'FontName','Courier');
grid on
figure(4);
plot(time_X, X(1,:),'r-', time_X, X_o_discrete(1,:), time_X, X_o_discrete(1,:)-0.8,'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон', 'уровень',0);
set(hl,'FontName','Courier');
grid on
figure(5);
plot(time_X, X(2,:),'r-', time_X, X_o_discrete(2,:), 'LineWidth', 2)
title ('x_2(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(6);
plot(time_X, X(3,:),'r-', time_X, X_o_discrete(3,:), 'LineWidth', 2)
title ('x_3(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(7);
plot(time_X, X(4,:),'r-', time_X, X_o_discrete(4,:), 'LineWidth', 2)
title ('x_4(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
figure(8);
plot(time_X, X(5,:),'r-', time_X, X_o_discrete(5,:), 'LineWidth', 2)
title ('x_5(t)');
xlabel('t');
hl=legend('X(t) - слежение','X_o(t) - эталон',0);
set(hl,'FontName','Courier');
grid on
function Solve_Interval(P_nach, N_str, h, P2, A,B,Q,R, T_nach, T_konech, X_0, poryadok, K_o, K_pr)
Zadayushee_Vozdeistvie_Discrete_Revers_Modern(h, T_nach, T_konech);
load Zadayushee_Vozdeistvie_Discrete_Revers X_o_discrete_rev
% ------------------------------------------------------------------------%
% Нахождение q(t)
for i = 1 : poryadok
qq = -P_nach(:,:,1) * X_o_discrete_rev(i,1);
q(i,1) = qq(i,1);
end
% Интегрирование q(t) в обратном времени
for k = 1 : N_str
q(:, k+1) = q(:, k) - h * ((P2(:,:,k)*B*inv(R)*B'-A') * q(:, k) + Q*X_o_discrete_rev(:,k));
end
q(:, k+1) = [];
size_q = size(q)
% ------------------------------------------------------------------------%
% Формирование вектора коэффициентов регулятора, значений задающего
% воздействия, значений вспомогательной функции в прямом порядке
K_pr_p = K_pr;
i = 1;
for j = N_str : -1 : 1
K_o_p(i,:) = K_o(j,:);
X_o_discrete(:,i) = X_o_discrete_rev(:,j);
q_pr(:, i) = q(:, j);
i = i + 1;
end
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
for k = 1 : N_str
A_(:,:,k) = A + B * K_o_p(k,:);
end
size_A_ = size(A_)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение фазовых координат
X(:,1) = X_0;
time_X(1) = T_nach;
for k = 1 : N_str
X(:, k+1) = X(:, k) + h * (A_(:,:,k) * X(:, k) + B * K_pr_p(k,:) * q_pr(:,k));
time_X(k+1) = time_X(k) + h;
end
X(:, k+1) = [];
time_X(k+1) = [];
size_X = size(X)
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение управления
for k = 1 : N_str
u(k) = K_o_p(k,:) * X(:,k) + K_pr_p(k,:) * q_pr(:,k);
end
size_u = size(u)
save Solve_Interval time_X X u X_o_discrete
Sintez_nablyud_polnogo_poryadka.mclc
clear all
close all
poryadok = 5;
% ------------------------------------------------------------------------%
b_0 = 5;
b_1 = 9;
% Укороченная система данного объекта
a_5 = 0.1153;
a_4 = 1.78;
a_3 = 3.92;
a_2 = 14.42;
a_1 = 8.583;
a_0 = 0;
% ------------------------------------------------------------------------%
% Приведение системы
b0 = b_0/a_5;
b1 = b_1/a_5;
a5 = a_5/a_5;
a4 = a_4/a_5;
a3 = a_3/a_5;
a2 = a_2/a_5;
a1 = a_1/a_5;
a0 = a_0/a_5;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Представление системы в пространстве состояний
A = [0 1 0 0 0;
0 0 1 0 0;
0 0 0 1 0;
0 0 0 0 1;
-a0 -a1 -a2 -a3 -a4]
B = [0; 0; 0; 0; 1]
C = [b0 b1 0 0 0]
% Начальные условия
X_0 = [10; 0; 6; 4; 8]
Time = 10;
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Получение max значений из файла
load Sostoyaniya X_max U_max
% ------------------------------------------------------------------------%
% Нахождение элементов матриц Q и R
r(1) = 100;
q(1) = 1/poryadok * r(1) * (U_max)^2 / (X_max(1))^2;
for i = 2 : poryadok
q(i) = q(1) * (X_max(1))^2 / (X_max(i))^2;
end
Q = diag(q)
R = diag(r)
% Для изменения коэффициентов
Q(1,1) = Q(1,1);
Q(2,2) = Q(2,2);
Q(3,3) = Q(3,3);
Q(4,4) = Q(4,4);
Q(5,5) = Q(5,5);
% Q(1,1) = Q(1,1)*1e+12;
% Q(2,2) = Q(2,2)*1e+8;
% Q(3,3) = Q(3,3)*1e+7;
% Q(4,4) = Q(4,4)*1e+0;
% Q(5,5) = Q(5,5)*1e+2;
R(1,1) = R(1,1);
% ------------------------------------------------------------------------%
P_nach = zeros(poryadok, poryadok);%+ones(poryadok, poryadok);
% ------------------------------------------------------------------------%
% Решение уравнения Риккати методом обратного интегрирования
P1 = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time,poryadok, P_nach)
% ------------------------------------------------------------------------%
% Построение графика коэффициентов регулятора
load Solve_Riccati_Method_Revers_Integr Time_R P N_str
PP = P;
for i = 1 : N_str
P = reshape(PP(i, :), poryadok, poryadok);
K(i, :) = -inv(R)*B'*P;
end
figure(2)
plot(Time_R,K(:,1),'-',Time_R,K(:,2),'-',Time_R,K(:,3),'-',Time_R,K(:,4),'-',Time_R,K(:,5),'-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Коэффициенты обратной связи в прямом времени');
set(tit1,'FontName','Courier');
hl=legend('k_1_о_с','k_2_о_с','k_3_о_с','k_4_о_с','k_5_о_с',0);
set(hl,'FontName','Courier');
grid on;
% ------------------------------------------------------------------------%
% Нахождение коэффициентов регулятора
disp('Коэффициенты регулятора:')
K = -inv(R) * B' * P1
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
A_ = A + B * K;
% ------------------------------------------------------------------------%
% Нахождение фазовых координат
X(:,1) = X_0;
h = 0.01;
time_X(1) = 0;
for k = 1 : N_str
X(:, k+1) = X(:, k) + h * A_ * X(:, k);
time_X(k+1) = time_X(k) + h;
end
X(:, k+1) = [];
time_X(k+1) = [];
% ------------------------------------------------------------------------%
% Нахождение управления
for k = 1 : N_str
u(k) = K * X(:,k);
end
% ------------------------------------------------------------------------%
% Нахождение коэффициентов наблюдателя
M_n = [C' A'*C' (A^2)'*C' (A^3)'*C' (A^4)'*C']
rank_M_n = rank(M_n)
A_r = A_
disp('Спектр матрицы регулятора:')
spektr_A_r = eig(A_r)
koeff = 1;
min_lyamda_A_r = min(real(spektr_A_r))
% lyamda = min_lyamda_A_r * koeff;
lyamda = -5;
disp('Спектр матрицы наблюдателя эталонный:')
lyamda_A_n = [lyamda - koeff * 4; lyamda - koeff * 3; lyamda - koeff * 2;...
lyamda - koeff; lyamda]'
syms k_n1 k_n2 k_n3 k_n4 k_n5 lyam
K_n = [k_n1; k_n2; k_n3; k_n4; k_n5];
Koeff_poly_n_etalon = poly(lyamda_A_n)
disp('Характеристический полином наблюдателя эталонный:')
poly_n_etalon = poly2sym(Koeff_poly_n_etalon, lyam)
disp('Характеристический полином наблюдателя реальный:')
poly_n_real = collect(expand(simplify(det(lyam*eye(poryadok) - (A - K_n*C)))),lyam)
raznost_poly = collect(poly_n_etalon-poly_n_real,lyam)
for i = 1 : poryadok
Koeff_raznost_poly(i) = subs(diff(raznost_poly,poryadok-i,lyam)/factorial(poryadok-i),lyam,0);
end
Koeff_raznost_poly
[Kn1 Kn2 Kn3 Kn4 Kn5]= solve(Koeff_raznost_poly(5), Koeff_raznost_poly(4),...
Koeff_raznost_poly(3), Koeff_raznost_poly(2), Koeff_raznost_poly(1), ...
k_n1, k_n2, k_n3, k_n4, k_n5)
Kn = [Kn1; Kn2; Kn3; Kn4; Kn5];
Kn = vpa(Kn,50)
% Проверка
Proverka = solve(det(lyam*eye(poryadok)-(A-Kn*C)))
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение x и x_оценочного
X_ocen_0 = [0 0 0 0 0]';
A_rash = [A B*K;
Kn*C A-Kn*C+B*K]
X_rash_0 = [X_0;X_ocen_0]
X_rash(:,1) = X_rash_0;
for k = 1 : N_str
X_rash(:,k+1) = X_rash(:,k) + h * A_rash * X_rash(:,k);
end
X_rash(:,k+1) = [];
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Разделение x и x_оценочного
for i = 1 : poryadok
X_n(i,:) = X_rash(i,:);
end
for i = poryadok + 1 : 2*poryadok
X_n_ocen(i - poryadok,:) = X_rash(i,:);
end
% ------------------------------------------------------------------------%
% ------------------------------------------------------------------------%
% Нахождение управления
for i = 1 : N_str
u_n(i) = K * X_n_ocen(:,i);
end
% Построение u(t) и X(t)
figure(3);
plot(time_X, u, 'r-', time_X, u_n, 'b-', 'LineWidth', 2)
title ('u(t)');
xlabel('t')
hl=legend('управление без наблюдателя','управление c наблюдателем');
set(hl,'FontName','Courier');
grid on
figure(4);
plot(time_X, X(1,:), time_X, X_n(1,:), time_X, X_n_ocen(1,:),'LineWidth', 2)
hold on
title ('x_1(t)');
xlabel('t')
hl=legend('x_1(t) без наблюдателя','x_1(t) c наблюдателем', 'x_о_ц_е_н_1(t)');
set(hl,'FontName','Courier');
grid on
figure(5);
plot(time_X, X(2,:), time_X, X_n(2,:), time_X, X_n_ocen(2,:),'LineWidth', 2)
title ('x_2(t)');
xlabel('t')
hl=legend('x_2(t) без наблюдателя','x_2(t) c наблюдателем', 'x_о_ц_е_н_2(t)');
set(hl,'FontName','Courier');
grid on
figure(6);
plot(time_X, X(3,:), time_X, X_n(3,:), time_X, X_n_ocen(3,:),'LineWidth', 2)
title ('x_3(t)');
xlabel('t')
hl=legend('x_3(t) без наблюдателя','x_3(t) c наблюдателем', 'x_о_ц_е_н_3(t)');
set(hl,'FontName','Courier');
grid on
figure(7);
plot(time_X, X(4,:), time_X, X_n(4,:), time_X, X_n_ocen(4,:),'LineWidth', 2)
title ('x_4(t)');
xlabel('t')
hl=legend('x_4(t) без наблюдателя','x_4(t) c наблюдателем', 'x_о_ц_е_н_4(t)');
set(hl,'FontName','Courier');
grid on
figure(8);
plot(time_X, X(5,:), time_X, X_n(5,:), time_X, X_n_ocen(5,:),'LineWidth', 2)
title ('x_5(t)');
xlabel('t')
hl=legend('x_5(t) без наблюдателя','x_5(t) c наблюдателем', 'x_о_ц_е_н_5(t)');
set(hl,'FontName','Courier');
grid on
Solve_Riccati_Method_Diag.m
% ------------------------------------------------------------------------%
% Метод диагонализации для решения алгебраического уравнения Риккати
function P = Solve_Riccati_Method_Diag(A,B,Q,R)
% Расширенная матрица системы
Z = [A B*inv(R)*B';
Q -A']
% Нахождение собственных векторов и собственных чисел матрицы Z
[V,D] = eig(Z)
% ------------------------------------------------------------------------%
% Построение матрицы S
% Индексы столбцов собственных значений Re(lyamda) > 0
Ind_Re_plus = find(sum(real(D)) > 0);
% Индексы столбцов собственных значений Re(lyamda) < 0
Ind_Re_minus = find(sum(real(D)) < 0);
% Формирование матрицы D в виде Re(lyamda) > 0 -> Re(lyamda) < 0
D1 = sum(D(:, Ind_Re_plus));
D2 = sum(D(:, Ind_Re_minus));
D = [D1 D2];
% Формирование матрицы S в виде Re(lyamda) > 0 -> Re(lyamda) < 0
S1 = V(:, Ind_Re_plus);
S2 = V(:, Ind_Re_minus);
S = [S1 S2];
% Поиск столбцов с комплексными корнями в матрице D
Ind_Complex_D = find(imag(D) ~= 0);
% Формирование конечной матрицы S
for i = 1 : 2 : length(Ind_Complex_D)
S (:, Ind_Complex_D(i) + 1) = imag(S(:, Ind_Complex_D(i)));
S (:, Ind_Complex_D(i)) = real(S(:, Ind_Complex_D(i)));
end
S = S
% ------------------------------------------------------------------------%
poryadok = length(A(1,:));
S12 = S(1 : poryadok, poryadok+1 : 2*poryadok);
S22 = S(poryadok+1 : 2*poryadok, poryadok+1 : 2*poryadok);
% ------------------------------------------------------------------------%
% Вычисление матрицы P
P = -S22 * inv(S12);
Solve_Riccati_Method_Revers_Integr.m% ------------------------------------------------------------------------%
% Решение уравнения Риккати интегрированием в обратном времени
function P = Solve_Riccati_Method_Revers_Integr(A,B,Q,R,Time,poryadok, P1)
save For_Riccati A B Q R poryadok
% Решение дифференциального уравнения Риккати
P1 = reshape(P1, poryadok^2, 1);
[Time_R, P] = ode45(@Riccati, [Time : -0.01 : 0], P1);
[N_str, N_stolb] = size(P);
% Построение полученного решения
figure(1)
for i = 1 : poryadok^2
plot(Time_R, P(:,i),'-')
hold on
end
% plot(Time_R,P(:,1),'-',Time_R,P(:,2),'-',Time_R,P(:,3),'-',Time_R,P(:,4),'-',Time_R,P(:,5),'-',Time_R,P(:,6),'-',...
% Time_R,P(:,7),'-',Time_R,P(:,8),'-',Time_R,P(:,9),'-',Time_R,P(:,10),'-',Time_R,P(:,11),'-',Time_R,P(:,12),'-',...
% Time_R,P(:,13),'-',Time_R,P(:,14),'-',Time_R,P(:,15),'-',Time_R,P(:,16),'-',Time_R,P(:,17),'-',Time_R,P(:,18),'-',...
% Time_R,P(:,19),'-',Time_R,P(:,20),'-',Time_R,P(:,21),'-',Time_R,P(:,22),'-',Time_R,P(:,23),'-',Time_R,P(:,24),'-',...
% Time_R,P(:,25),'-', 'lineWidth', 2);
grid on;
tit1 = title('Решения уравнения Риккати');
set(tit1,'FontName','Courier');
xlabel('t');
% legend('p_1','p_2','p_3','p_4','p_5','p_6','p_7','p_8','p_9','p_1_0','p_1_1','p_1_2','p_1_3','p_1_4','p_1_5','p_1_6',...
% 'p_1_7','p_1_8','p_1_9','p_2_0','p_2_1','p_2_2','p_2_3','p_2_4','p_2_5');
save Solve_Riccati_Method_Revers_Integr Time_R P N_str
save Solve_Riccati_Method_Revers_Integr_for_slegenie Time_R P N_str
P = reshape(P(N_str,:), poryadok, poryadok);
function dP = Riccati(Time,P)
load For_Riccati A B Q R poryadok
P = reshape(P, poryadok, poryadok);
% Дифференциальное уравнение Риккати
dP = -P*A - A'*P + P*B*inv(R)*B'*P - Q;
dP = reshape(dP, poryadok^2, 1);
Vozmyshyayushee_Vozdeistvie_Discrete_Revers.m% Получение дискретных значений возмущающего воздействия в обратном времени
% для нахождения вспомогательной функции q(t)
function Vozmyshyayushee_Vozdeistvie_Discrete_Revers(h, T_nach, T_konech)
% ------------------------------------------------------------------------%
% Возмущающее воздействие
A = 1;
w = 4*pi;
k = 1;
RETURN = 1;
while RETURN == 1
disp('Возмущающее воздействие - const: 1')
disp('Возмущающее воздействие - A*sin(w*t): 2')
reply = input('Выберете возмущающее воздействие [1 или 2]: ', 's');
switch reply
case '1'
disp('Возмущающее воздействие - const')
for t = T_konech: -h : T_nach
w_discrete_rev(:, k) = [A + 0 * t; 0; 0; 0; 0];
k = k + 1;
end
RETURN = 2;
case '2'
disp('Возмущающее воздействие - A*sin(w*t)')
for t = T_konech: -h : T_nach
w_discrete_rev(:, k) = [A * sin(w * t); 0; 0; 0; 0];
k = k + 1;
end
RETURN = 2;
otherwise
disp('Неизвестное воздействие.')
RETURN = 1;
end
end
figure(2)
t = T_konech : -h : T_nach;
plot(t, w_discrete_rev(1,:), 'r-', 'LineWidth', 2);
xlabel('t')
tit1 = title('Возмущающее воздействие');
set(tit1,'FontName','Courier');
hl=legend('Возмущающее воздействие',0);
set(hl,'FontName','Courier');
grid on;
save Vozmyshyayushee_Vozdeistvie_Discrete_Revers w_discrete_rev
% ------------------------------------------------------------------------%
Zadayushee_Vozdeistvie_Discrete_Revers_Modern.m% Получение дискретных значений задающего воздействия в обратном времени
% для нахождения вспомогательной функции q(t)
function Zadayushee_Vozdeistvie_Discrete_Revers_Modern(h, T_nach, T_konech)
% ------------------------------------------------------------------------%
% Задающее воздействие
alfa = 0.2;
beta = 10;
H = 0.8;
k = 1;
for t = T_konech: -h : T_nach
X_o_1 = 10*exp(-1/5*t)*t+4/5;
X_o_2 = -2*exp(-1/5*t)*t+10*exp(-1/5*t);
X_o_3 = 2/5*exp(-1/5*t)*t-4*exp(-1/5*t);
X_o_4 = -2/25*exp(-1/5*t)*t+6/5*exp(-1/5*t);
X_o_5 = 2/125*exp(-1/5*t)*t-8/25*exp(-1/5*t);
X_o_discrete_rev(:, k) = [X_o_1; X_o_2; X_o_3; X_o_4; X_o_5];
k = k + 1;
end
figure(2)
t = T_konech : -h : T_nach;
plot(t, X_o_discrete_rev(1,:), 'r-', t, X_o_discrete_rev(1,:)-H, 'LineWidth', 2);
xlabel('t')
tit1 = title('Задающее воздействие');
set(tit1,'FontName','Courier');
hl=legend('Отслеживание зад. возд. на H ','Задающее воздействие',0);
set(hl,'FontName','Courier');
grid on;
save Zadayushee_Vozdeistvie_Discrete_Revers X_o_discrete_rev
% ------------------------------------------------------------------------%
Похожие работы
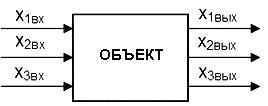
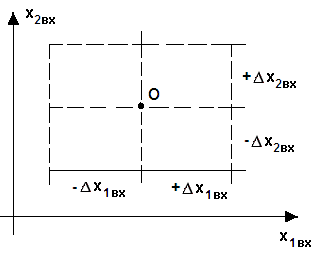
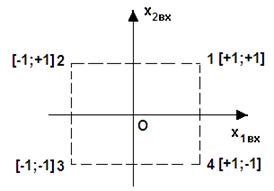
... степеней свободы. Величину критерия Фишера (F-критерий) определяют по формуле: (должно быть). Значимость коэффициентов bi уравнения регрессии определяют по t-критерию (критерии Стьюдента): , . Идентификация объектов управления методом корреляционного анализа Метод корреляционного анализа используется для идентификации объектов управления в том случае, если входные и выходные ...
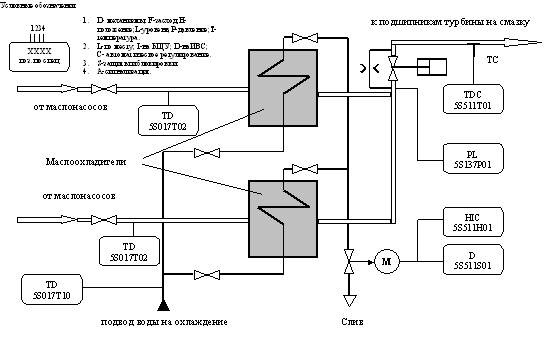
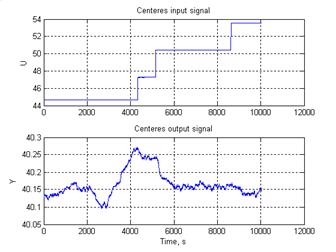
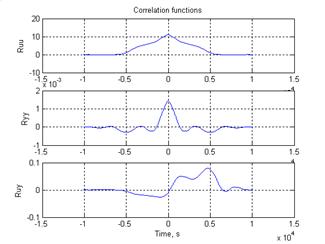
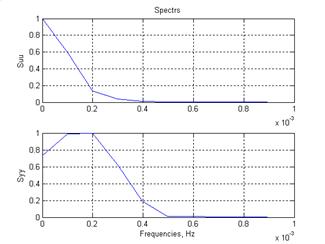
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...
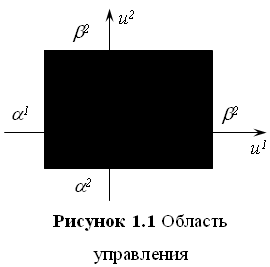
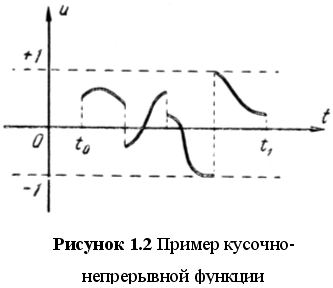
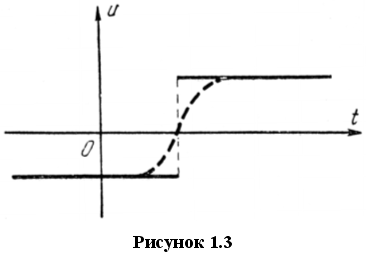
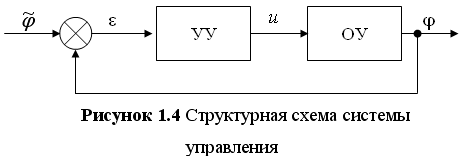

... проектирования. Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС. Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью ...
... damn(t)/dt =[daij(t)/dt] 1.3 ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА. Физический объект - физическое устройство, характеризуемое некоторым числом свойств, соответствующих целям его использования. В теории систем существенным является не физическое, а математическое описание свойств объекта и соотношений между ними. В теории систем объектом А является абстрактный объект, связанный с множеством ...
0 комментариев