Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
МОДЕЛИ СЛУЧАЙНЫХ СИГНАЛОВ
Сложение случайных функций
ОПТИМИЗАЦИЯ В ТЕОРИИ СИСТЕМ
ЗАДАЧИ И МЕТОДЫ ЛИНЕЙНОГО ПРГРАММИРОВАНИЯ
Навигация
Математические основы теории систем
Математические основы теории систем
96339
знаков
12
таблиц
7
изображений
ОГЛАВЛЕНИЕ
Оглавление 1
Введение 3
Объект и устройство 3
Задачи управления 4
Матричный формализм в теории систем 6
Линейные операторы 6
Инвариантное подпространство 6
Действия над векторами 8
Матрицы и линейные преобразования 10
Понятие матриц 10
Операции над матрицами 11
Транспонированная матрица 12
Теорема Гамильтона-Келли 13
Обратная матрица 13
Диагонализация матриц 13
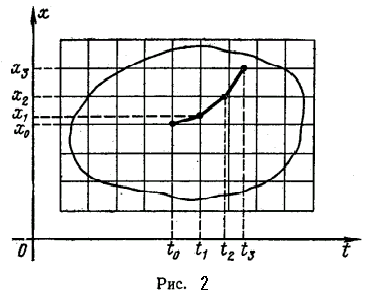
Понятие динамического объекта 14
Уравнение вход-выход-состояние 15
Объекты управления с непрерывным временем 19
Способы вычисления матричной экспоненты 21
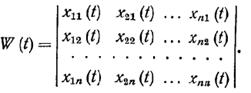
Весовая функция 24
Передаточные функции и их свойства 26
Объекты управления с дискретным временем 27
Решетчатые функции 28
Разностные уравнения 29
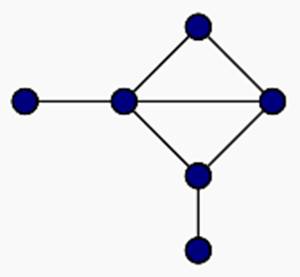
Структурные свойства объектов управления 33
Наблюдаемость 35
Характеристики управляемости 35
Сигналы в задачах управления и наблюдения
динамических объектов 36
Скачкообразная и переходная функции 38
Импульсная и весовая функции 39
Детерминированные стохастические сигналы и
системы 40
Модели случайных сигналов 42
Векторные (многомерные) случайные величины 42
Числовые характеристики (моменты) случайных
величин 43
Моменты многомерных случайных величин 46
Коварционная матрица 48
Элементы теории случайных функций 48
Линейные операции над случайными функциями 52
Стационарные случайные функции 55
Оптимизация в теории систем 55
Постановка задачи оптимального управления 56
Классификация задач оптимального управления 57
Динамически задачи оптимизации управления 59
Классическая задача оптимизации 61
Выпуклые и вогнутые функции 61
Задачи нелинейного программирования 62
Метод штафных функций 62
Ограничения типа равенств неотрицательность
переменных 63
Квадратичное программирование 64
Итеративные методы поиска оптимума 64
Градиентный метод 64
Метод наискорейшего спуска (подъема) 64
Алгоритм Ньютона 65
Задачи и методы линейного программирования 65
Геометрическая интерпритация основной задачи
программирования 66
Симплекс метод 66
ВВЕДЕНИЕ.
Кибернетика - это наука об управлении, а также передаче и обработке информации в технических и нетехнических системах. Кибернетика возникла на базе техники и прежде всего техники регулирования, связи и машинной вычислительной техники, причем здесь нашли применение методы различных математических дисциплин, таких как теория функций, теория вероятности, статистика и математическая логика. Новым и можно сказать революционным моментом явилось то, что эти способы и математические методы, применявшиеся первоначально в технике, оказались удобными для анализа определенных явлений и достижения определенных целей в нетехнических системах и, прежде всего, и биологии и философии, экономики и общественных науках.
Теория автоматизации при предварительном определении понятия можно назвать кибернетикой. В автоматизированных процессах при автоматизации установок производственной техники, мы находим переплетение производственной и информационной техники.
Оно характеризуется тем, что на основании информации, получаемой путем измерения и затем перерабатываемой, оказывается воздействие на поток энергии или вещества таким образом, чтобы целенаправленно изменить определенные физические или технико-экономические параметры. Этот процесс называется управлением.
Управление - это целенаправленное воздействие на параметры или на отдельные системы и их поведение.
ОБЪЕКТ И УСТОЙСТВО.
Объект (объект управления) является частью данной установки, на которую оказывает управляющее воздействие и изменения которой являются определяющими для выполнения задачи управления.
СТРУКТУРНАЯ СХЕМА УПРВЛЕНИЯ
|
|
![]()
![]() Управляемый
Управляемый
![]() параметр
параметр
исполнительный сигнал
|
задающее
воздействие
поток информации
![]()
Рис. 1
Регулятором (управляющее устройство) называется совокупность звеньев, которые служат для оказания воздействия на объект через исполнительный орган в соответствии с поставленной задачей. Исполнительным органом называется звено, которое служит для непосредственного целенаправленного воздействия на поток энергии или вещества, он обычно относится к объекту. Звенья объекта и устройства управления называются элементарными звеньями. Временные характеристики входных и выходных параметров этих звеньев называются входными и выходными сигналами.
Входные сигналы, воздействующие на объект, называются сигналами помехи.
ЗАДАЧИ УПРАВЛЕНИЯ
Ранее мы охарактеризовали управление как целенаправленное воздействие на параметры процесса или системы. прежде чем осуществить такое целенаправленное воздействие, исследуем задачи.
Конкретная постановка задачи гласит.
Похожие работы
... D=1- W3W4(W1W5W6+ W7+ W1W8+ W2W6 W7+ W2W7+2W2W8+ 1)+ W5W6(W3W4(W7+ W1W5W6+ W2W7+ W2W8+1)-1) Для x1 Для x4 Для y Для х13 Задание 2. Синтез комбинационных схем. 2.1 Определение поставленной задачи Устройство, работа которого может быть представлена на языке алгебры высказываний, принято называть логическим. Пусть такое устройство имеет n ...
... противоположные подходы, но нельзя считать ни один из них "юридически законным" или вытекающим из каких ни будь законов природы, нельзя считать стиль управления системой на основе системного анализа "правильным", "современным", "куль-турным". Другое дело — не знать о возможности применения системного подхода к вопросам управления — вот это неправильно, некультурно. Пример системного подхода ...

... в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы. 3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть x(t)=F[x(t0); m(t0; t)], ...
... Рассела и во многом базируется на работе Бертрана Рассела и Альфреда Уайтхэда «Principia Mathematica» (этот фундаметальный трёхтомник математической логики до сих пор не издан на русском языке)[8]. Заключение Прародителем информатики является кибернетика, основанная американским математиком Норбертом Винером, опубликовавшим в 1948 году одноименную книгу. Основоположником ...
0 комментариев