Навигация
Определение минимального радиуса кулачка
24859
знаков
6
таблиц
7
изображений
3.2 Определение минимального радиуса кулачка
Для проектирования кулачкового механизма очень важно правильно выбрать минимальный радиус кулачка ![]() . Определение
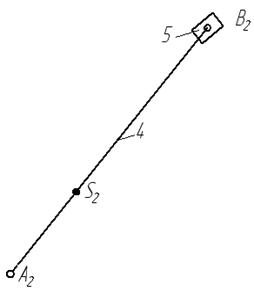
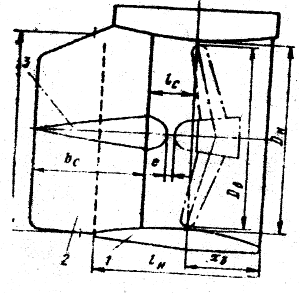
. Определение ![]() является одной из задач динамического синтеза кулачковых механизмов. Проще всего эта задача решается графическим способом. Изображаем коромысло ED в двух крайних положениях в масштабе
является одной из задач динамического синтеза кулачковых механизмов. Проще всего эта задача решается графическим способом. Изображаем коромысло ED в двух крайних положениях в масштабе ![]() . Траекторию движения точки D коромысла делим в соответствии с диаграммой углового перемещения, получаем точки D0 – D13, соединив которые с точкой Е, получаем мгновенные положения толкателя. В каждом положении коромысла откладываем отрезок ℓV/ω (табл. 5) – получаем точки 1 – 13. Из получившихся точек под углом γmin = 45° к данному положению коромысла проводим прямые – получаем точку центра вращения кулачка. Расстояние ОD0 будет равно
. Траекторию движения точки D коромысла делим в соответствии с диаграммой углового перемещения, получаем точки D0 – D13, соединив которые с точкой Е, получаем мгновенные положения толкателя. В каждом положении коромысла откладываем отрезок ℓV/ω (табл. 5) – получаем точки 1 – 13. Из получившихся точек под углом γmin = 45° к данному положению коромысла проводим прямые – получаем точку центра вращения кулачка. Расстояние ОD0 будет равно ![]() .
.
![]() .
.
Точку центра кулачка соединяем отрезком с каждой из точек 1 – 13 и измеряем углы, образуемые этими отрезками и соответствующими положениями коромысла – получаем значения угла передачи движения в определенных положениях кулачкового механизма (табл. 5). Строим график изменения угла передачи движения в масштабах μγ = 1°/мм и ![]() .
.
3.3 Профилирование кулачка
Из центра О проводим окружность радиусом ![]() . На дуге, описанной из центра Е радиусом ℓED, проводим разметку пути точки D согласно графику
. На дуге, описанной из центра Е радиусом ℓED, проводим разметку пути точки D согласно графику
β = β(t).
Обращаем движение. Из центра О радиусом ОЕ описываем дугу и в направлении обратном вращению кулачка откладываем от радиуса ОЕ углы φу, φд, φв, которые делим затем на равные части соответственно промежуткам графика β = β(t); обозначаем полученные точки деления 1' – 13'.
Из этих точек проводим дуги радиусом ℓED, а из центра О засекаем их радиусами ОD1 – OD13. Соединяя точки пересечения построенных дуг плавной кривой, получаем теоретический профиль кулачка.
Радиус ролика выбираем из следующих соображений:
rp ≤ 0,4∙![]() или rp ≤ 0,8∙ρmin,
или rp ≤ 0,8∙ρmin,
где ρmin – минимальный радиус кривизны профиля кулачка.
Определяем графически ρmin = 6,64 мм.
0,4∙![]() = 0,4∙44,28 = 17,71 мм,
= 0,4∙44,28 = 17,71 мм,
0,8∙ρmin = 0,8∙6,64 = 5,32 мм.
Из двух значений принимаем наименьшее, тогда rp = 5,32 мм (в масштабе чертежа μℓ получаем ![]() мм). Внутренняя огибающая окружностей, описанных радиусом ролика, центр которого перемещается по теоретическому профилю, образует искомый рабочий профиль кулачка.
мм). Внутренняя огибающая окружностей, описанных радиусом ролика, центр которого перемещается по теоретическому профилю, образует искомый рабочий профиль кулачка.
4. Проектирование зубчатой передачи
4.1 Расчет привода машины
Дано:
числа зубьев колес Z1 = 21, Z2 = 47, Z6 = 12, Z7 = 18;
модули m1 = 5 мм; m2 = 5,5 мм;
передаточное отношение U1-5 = 15,85;
частота вращения двигателя nдв = 1530 об/мин;
межосевое расстояние ![]()
зацепления Z6 – Z7 неравносмещенное, коэффициент смещения Х выбирать из условия обеспечения заданного межосевого расстояния;
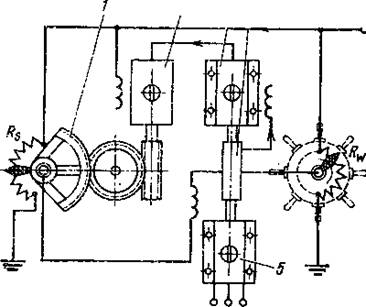
кинематическая схема привода представлена на рис. 5.
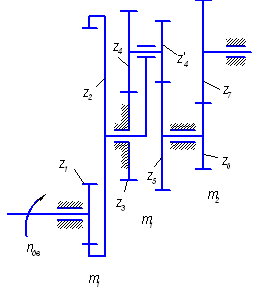
Рис. 5
Привод машины состоит из двух пар зубчатых колес с неподвижными осями и планетарной передачи. Определим передаточное отношение планетарной передачи  .
.
Передаточное отношение от водила к 5-му колесу определяется по формуле
 ,
,
![]() .
.
Методом подбора разбиваем передаточное число следующим образом
 , Z3 = 23, Z4 = 30, Z'4 = 23, Z5 = 25.
, Z3 = 23, Z4 = 30, Z'4 = 23, Z5 = 25.
Похожие работы

... четвертого колеса к третьему; отношение модулей зубчатых колес первой ступени к второй. 3. Исследование качественных характеристик внешнего эвольвентного зацепления Зубчатые передачи являются наиболее распространенным видом механических передач. В зависимости от условий эксплуатации при проектировании зубчатых передач учитываются различные факторы, влияющие на повышение их прочности, ...
... под линией движения ползуна. Масштабный коэффициент длин принимаем таким же как и для планов перемещений . Максимальную ординату на графике давления принимаем равной 50 мм, тогда . Полный цикл водяного насоса совершается за 1 оборот кривошипа. Значение силы полезного сопротивления FCопределяем по формуле: . Знак «+» берется в том случае, когда сила FCнаправлена противоположно движению ползуна ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... машины широко используют в качестве гидродвигателей. Гидродвигатели используются в гидроприводах палубных механизмов. 6. Элементы объёмного гидропривода: рабочие жидкости; гидроаппаратура, гидролинии и гидроёмкости, кондиционеры рабочей жидкости Объемным гидроприводом наз совокупность объем гидромашин, гидроаппаратуры и вспомогательных устройств соед. с помощью гидролиний. Предназначена для ...
0 комментариев