Навигация
Расчет внешнего неравносмещенного зацепления с прямыми зубьями
24859
знаков
6
таблиц
7
изображений
4.2 Расчет внешнего неравносмещенного зацепления с прямыми зубьями
Заданы следующие величины:
модуль зацепления m = 5,5 мм.
угол исходного профиля рейки α = 20º;
коэффициент высоты головки зуба исходного профиля ![]() ;
;
коэффициент радиального зазора ![]() ;
;
число зубьев шестерни Z6 = 12;
число зубьев колеса Z7 = 18;
межосевое расстояние aw = 85 мм.
Порядок проведения расчета. Делительные диаметры
![]() ;
;
![]() .
.
Основные диаметры
![]() ;
;
![]() .
.
Окружные делительный и основной шаги
![]() ;
;
![]() .
.
Угол зацепления
 ;
;
αw = arccos 0,91206 = 24,208° = 24° 12' 30".
Суммарный коэффициент смещения

По блокирующему контуру [4, фиг. 32] разбиваем ХΣ на слагаемые и определяем Х6 = 0,383 и Х7 = 0,12.
Начальные диаметры
 ;
;
 .
.
Диаметры впадин зубьев
![]() ;
;
![]() .
.
Диаметры вершин зубьев
![]() ;
;
![]() .
.
Окружные толщины зубьев (о делительной окружности)
![]() ;
;
![]() .
.
Проверка на заострение
 ;
;
 ;
;
![]() ;
;
![]() ;
;
Sa = 0,2 ∙ 5,5 = 1,1 мм, выполняется условие Sa6, Sa7 ≥ Sa, значит, заострения зубьев нет. По данным проведенных расчетов вычерчиваем зубчатое зацепление в масштабе μ'ℓ = 0,00025 м/мм.
4.3 Качественные показатели зацепления
1. Коэффициент перекрытия
![]() ;
;
![]() ;
;
 .
.
2. Коэффициент удельного скольжения
![]() ;
;
![]() ;
;
![]() ,
, ![]() ;
;
![]() ;
; ![]() .
.
3. Коэффициент удельного давления в полюсе
![]() ;
;
 .
.
Все показатели находятся в допускаемых пределах.
5. Силовой расчет механизма
Данные для расчета:
отношения 
погонный вес q = 120 H/м;
сила полезного сопротивления Рпс = 158 Н;
Требуется определить давление в кинематических парах, уравновешивающую силу (момент).
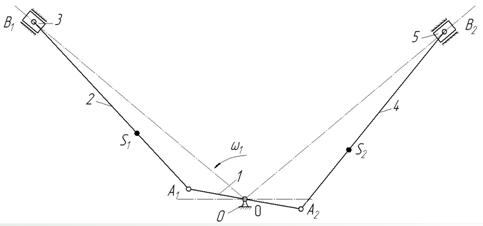
Выбираем положение во время рабочего хода машины, в котором имеет место наибольшее ускорение рабочего органа – 7-е положение. Строим планы положения механизма в масштабе μℓ = 0,00175 ![]() , скоростей – μv = 0,01
, скоростей – μv = 0,01 ![]() , ускорений – μа = 0,05
, ускорений – μа = 0,05 ![]() .
.
Определяем положение центров тяжестей звеньев на планах
а) механизма
![]() ;
;
 ;
;
б) скоростей
![]() ;
;
 ;
;
в) ускорений
![]() ;
;
 .
.
Определяем веса звеньев
G3 = q∙ℓ3 = 120∙0,157 = 18,84 H;
G4 = q∙ℓ4 = 120∙0,367 = 44,04 H;
G5 = λ∙G4 = 0,32∙44,04 = 14,09 H.
Определяем силы инерции
 ;
;
 ;
;
 .
.
Определяем моменты инерции звеньев
 ;
;
 ;
;
 .
.
Определяем угловые ускорения и моменты сил инерции звеньев
 ;
;
 ;
;
![]() ;
;
![]() .
.
Определяем плечи сил инерции
 ;
;
 .
.
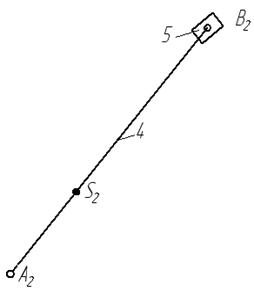
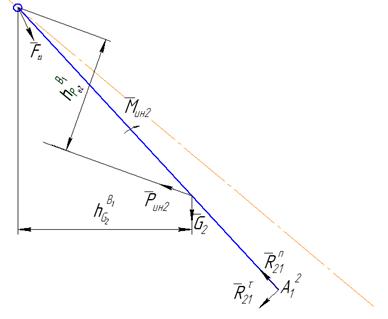
Силовой расчет механизма начинаем с последней присоединенной группы Ассура – ![]() . На эту группу действует сила полезного сопротивления Рпс, сила тяжести поршня G5, сила инерции поршня Ри5, реакция стойки R05, вес шатуна G4, сила инерции шатуна Ри4, реакция отброшенного звена R34 (
. На эту группу действует сила полезного сопротивления Рпс, сила тяжести поршня G5, сила инерции поршня Ри5, реакция стойки R05, вес шатуна G4, сила инерции шатуна Ри4, реакция отброшенного звена R34 (![]() и
и ![]() ).
).
Уравнение равновесия группы под действием этих сил имеет следующий вид
![]() .
.
Величину и направление силы ![]() можно найти из уравнения моментов всех сил, действующих на звено 4, относительно точки С
можно найти из уравнения моментов всех сил, действующих на звено 4, относительно точки С
![]() ;
;
![]()
 .
.
Строим план сил в масштабе μР = 1 Н/мм и замеряем недостающие силы R05 = 33,15 Н; ![]() = 97,73 Н;
= 97,73 Н; ![]() = 97,67 Н.
= 97,67 Н.
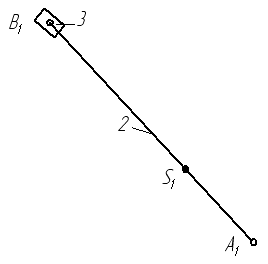
Переходим к следующей группе Ассура ![]() . На нее действуют сила реакции предыдущей группы R43, сила инерции коромысла Ри3, вес коромысла G3, реакция стойки R03, реакция отброшенного звена R12.
. На нее действуют сила реакции предыдущей группы R43, сила инерции коромысла Ри3, вес коромысла G3, реакция стойки R03, реакция отброшенного звена R12.
Уравнение равновесия группы под действием этих сил имеет следующий вид
![]() .
.
Величину и направление силы ![]() можно найти из уравнения моментов всех сил, действующих на звено 3, относительно точки О3
можно найти из уравнения моментов всех сил, действующих на звено 3, относительно точки О3
![]() ;
;
![]() .
.
 .
.
Строим план сил и замеряем недостающие силы R03 = 103,27 Н.
Рассмотрим ведущее звено – кривошип. На него действует сила реакции предыдущей группы R21, реакция стойки R01, уравновешивающая сила Рур.
Уравнение равновесия группы под действием этих сил имеет следующий вид
![]() .
.
Величину и направление силы Рур можно найти из уравнения моментов всех сил, действующих на звено 1, относительно точки О2
![]() ;
;
![]() .
.
 .
.
Строим план сил и определяем недостающие силы R01 = 59,29 Н.
Определим уравновешивающую силу с помощью рычага Жуковского.
Строим план скоростей и в соответствующих точках прикладываем внешние силы и силы инерции, поворачивая их на 90° по часовой стрелке. Составляем уравнение равновесия рычага
![]() ;
;
![]() 0.
0.
Отсюда получаем
![]()
Похожие работы

... четвертого колеса к третьему; отношение модулей зубчатых колес первой ступени к второй. 3. Исследование качественных характеристик внешнего эвольвентного зацепления Зубчатые передачи являются наиболее распространенным видом механических передач. В зависимости от условий эксплуатации при проектировании зубчатых передач учитываются различные факторы, влияющие на повышение их прочности, ...
... под линией движения ползуна. Масштабный коэффициент длин принимаем таким же как и для планов перемещений . Максимальную ординату на графике давления принимаем равной 50 мм, тогда . Полный цикл водяного насоса совершается за 1 оборот кривошипа. Значение силы полезного сопротивления FCопределяем по формуле: . Знак «+» берется в том случае, когда сила FCнаправлена противоположно движению ползуна ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... машины широко используют в качестве гидродвигателей. Гидродвигатели используются в гидроприводах палубных механизмов. 6. Элементы объёмного гидропривода: рабочие жидкости; гидроаппаратура, гидролинии и гидроёмкости, кондиционеры рабочей жидкости Объемным гидроприводом наз совокупность объем гидромашин, гидроаппаратуры и вспомогательных устройств соед. с помощью гидролиний. Предназначена для ...
0 комментариев