Навигация
6. Расчет маховика
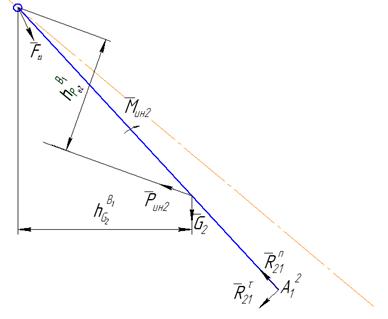
Для каждого положения механизма определяем приведенный к главному валу момент сил сопротивления, определяемый из условия равенства мощности приведенного момента и мощности силы полезного сопротивления
Для каждого положения механизма определяем приведенный к главному валу момент инерции, определяемый из условия равенства кинетических энергий
 ;
;
 .
.
Результаты всех расчетов и замеров сведены в таблицу 6.
Табл. 6
| № | Mпр, Н∙м | Jпр, кг∙м2 | ℓΔЕ, мм |
| JMX + Jnp, кг∙м2 | ω1, рад |
| 0 | 0,00 | 0,0000 | 0,00 | 6,55 | 0,2214 | 7,69 |
| 1 | 2,46 | 0,0025 | 6,83 | 6,91 | 0,2239 | 7,86 |
| 2 | 3,87 | 0,0064 | 4,75 | 6,80 | 0,2278 | 7,73 |
| 3 | 4,97 | 0,0104 | -3,52 | 6,37 | 0,2318 | 7,41 |
| 4 | 5,72 | 0,0128 | -16,47 | 5,69 | 0,2342 | 6,97 |
| 5 | 5,96 | 0,0126 | -31,96 | 4,87 | 0,2340 | 6,45 |
| 6 | 5,49 | 0,0095 | -47,00 | 4,08 | 0,2309 | 5,95 |
| 7 | 3,88 | 0,0042 | -57,42 | 3,54 | 0,2256 | 5,60 |
| 8 | 0,00 | 0,0000 | -56,23 | 3,60 | 0,2214 | 5,70 |
| 9 | 0,0245 | -42,17 | 4,34 | 0,2459 | 5,94 | |
| 10 | 0,0732 | -28,11 | 5,08 | 0,2946 | 5,87 | |
| 11 | 0,0104 | -14,06 | 5,81 | 0,2318 | 7,08 |
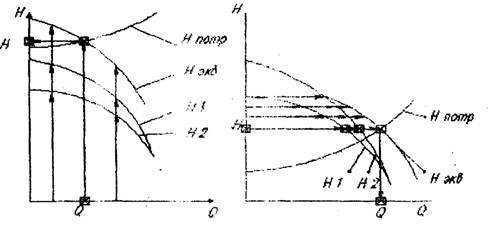
Строим графики Мпр и Jпр в масштабах μφ = 0,0175 рад/мм, μМ = 0,1 Н∙м/мм и μJ = 0,0008 кг∙м2/мм. Графическим интегрированием графика моментов получаем график приведенных работ (полюсное расстояние H = 30). Далее получаем график ΔЕпр(φ), его масштаб будет равен
![]() .
.
Определяем минимальную и максимальную угловую скорость кривошипа
 ;
;
 .
.
Находим углы касательных к диаграмме
 ;
;
 .
.
Графически исключаем параметр φ и строим график ΔЕпр(J). Проводим к нему касательные под углами ψmax и ψmin. Точка пересечения касательных – новое начало координат графика.
Замеряем
JMX = 276,75∙0,0008 = 0,2214 кг∙м2;
Епр0 = 124,79∙0б0525 = 6,552 Дж.
Принимаем диаметр маховика dMX = 0,5 м, тогда вес обода будет
 ;
;
вес маховика с ободом и спицами равен GMX = 1,3∙Gоб = 1,3∙34,75 = 45,18 Н.
Угловую скорость кривошипа в каждом положении механизма находим по формуле  , результаты расчета занесены в таблицу 6. График изменения угловой скорости строим в масштабе 0,1 (рад/с)/мм.
, результаты расчета занесены в таблицу 6. График изменения угловой скорости строим в масштабе 0,1 (рад/с)/мм.
Определяем мощность двигателя по формуле
 .
.
Список литературы
1. Артоболевский И.И. Теория механизмов. – М., Издательство "Наука", 1965. – 776 с., ил.
2. Аллилуева Л.А., Езерская С.В., Кунивер А.С., Янченко Т.А. Методические указания к выполнению курсового проекта по теории механизмов и машин. 3-е изд., стереотипное. – Ижевск, Издательство ИжГТУ, 2004. – 72 с., ил.
3. Газизова З.С., Русаева В.А., Янченко Т.А. Задания для курсового проекта по теории механизмов и машин. Насосы и двигатели внутреннего сгорания. – Ижевск, Издательство ИжГТУ, 1980. – 32 с., ил.
4. Болотовская Т.П., Болотовский И.А., Смирнов В.Э. Справочник по корригированию зубчатых колес. – М.: Машгиз, 1962. – 216 с., ил.
5. Кореняко А.С. и др. Курсовое проектировании по теории механизмов и машин. – Киев, Издательство "Вища школа", 1970. – 332 с., ил.
Похожие работы

... четвертого колеса к третьему; отношение модулей зубчатых колес первой ступени к второй. 3. Исследование качественных характеристик внешнего эвольвентного зацепления Зубчатые передачи являются наиболее распространенным видом механических передач. В зависимости от условий эксплуатации при проектировании зубчатых передач учитываются различные факторы, влияющие на повышение их прочности, ...
... под линией движения ползуна. Масштабный коэффициент длин принимаем таким же как и для планов перемещений . Максимальную ординату на графике давления принимаем равной 50 мм, тогда . Полный цикл водяного насоса совершается за 1 оборот кривошипа. Значение силы полезного сопротивления FCопределяем по формуле: . Знак «+» берется в том случае, когда сила FCнаправлена противоположно движению ползуна ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... машины широко используют в качестве гидродвигателей. Гидродвигатели используются в гидроприводах палубных механизмов. 6. Элементы объёмного гидропривода: рабочие жидкости; гидроаппаратура, гидролинии и гидроёмкости, кондиционеры рабочей жидкости Объемным гидроприводом наз совокупность объем гидромашин, гидроаппаратуры и вспомогательных устройств соед. с помощью гидролиний. Предназначена для ...
0 комментариев