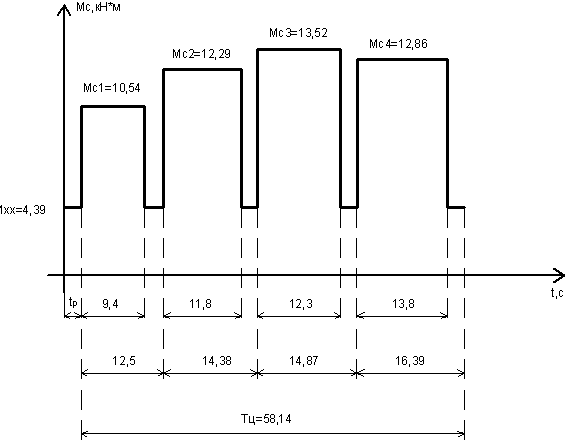
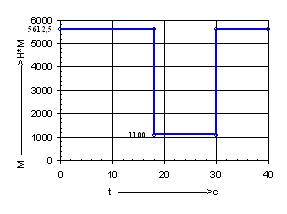
Построение нагрузочной диаграммы и механической характеристики рабочей машины
Расчет силового электропривода
Расчет параметров и выбор силового преобразователя
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет переходных процессов в электроприводе за цикл работы
Навигация
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет силового электропривода
31450
знаков
1
таблица
16
изображений
5. Расчет статических механических и электромеханических характеристик двигателя и привода
Механическая характеристика рассчитывается по формуле:
 (32)
(32)
где![]() - фазное напряжение на статоре;
- фазное напряжение на статоре;
![]() - активное сопротивление фазы статора, Ом;
- активное сопротивление фазы статора, Ом;
![]() - активное сопротивление фазы ротора, приведенное к цепи статора, Ом;
- активное сопротивление фазы ротора, приведенное к цепи статора, Ом;
![]() - индуктивное сопротивление фазы статора, Ом;
- индуктивное сопротивление фазы статора, Ом;
![]() - индуктивное сопротивление фазы ротора, приведенное к цепи статора, Ом;
- индуктивное сопротивление фазы ротора, приведенное к цепи статора, Ом;
s – скольжение;
![]() - скорость идеального холостого хода (магнитного поля).
- скорость идеального холостого хода (магнитного поля).
Сопротивления фаз статора и приведенные сопротивления фаз ротора рассчитаем по справочным данным.
Базисное значение сопротивления:
![]() (33)
(33)
где в качестве базисных значений напряжения и тока принимаем номинальные значения фазного напряжения и тока статора:
![]()
![]() (34)
(34)
Тогда:![]()
![]()
![]() (35)
(35)
![]()
![]()
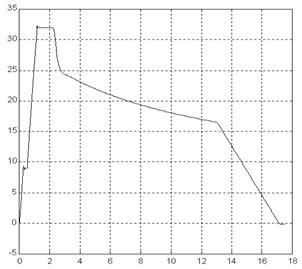
Построим естественную механическую характеристику по формуле (41) используя математический пакет Mathcad, учитывая, что ![]() , подставляя
, подставляя ![]() , откладывая по оси х момент М, а по оси у - скорость двигателя
, откладывая по оси х момент М, а по оси у - скорость двигателя ![]() .
.
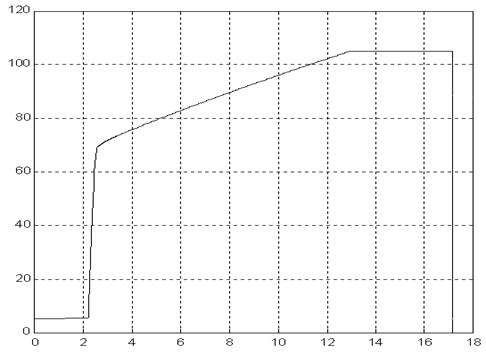
Естественная механическая характеристика двигателя представлена на рисунке 8.
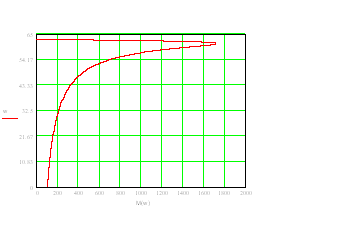
Рисунок 8 - Естественная механическая характеристика двигателя
Рассчитаем электромеханические характеристики двигателя.
В качестве базисной величины тока, принимаем номинальное значение тока ротора, приведенного к статорной цепи.
Зависимость приведенного тока ротора от скольжения определяется по формуле:
 (36)
(36)
Зависимость тока статора от скольжения определяется по формуле:
 (37)
(37)
где![]() - относительный ток ротора;
- относительный ток ротора;
![]() - максимальное значение относительного тока ротора;
- максимальное значение относительного тока ротора;
![]() - относительный ток намагничивания;
- относительный ток намагничивания;
![]() - номинальный ток статора.
- номинальный ток статора.
Максимальное значение относительного тока ротора:
 (38)
(38)
где - критическое скольжение;
- критическое скольжение;
![]() .(39)
.(39)
Относительный ток намагничивания:
 (40)
(40)
Относительный ток ротора:
 (41)
(41)
Построим естественную электромеханическую характеристику роторного тока и электромеханическую характеристику статорного тока, используя математический пакет Mathcad, подставляя ![]() , откладывая по оси х ток I, а по оси у - скорость двигателя
, откладывая по оси х ток I, а по оси у - скорость двигателя ![]() .
.
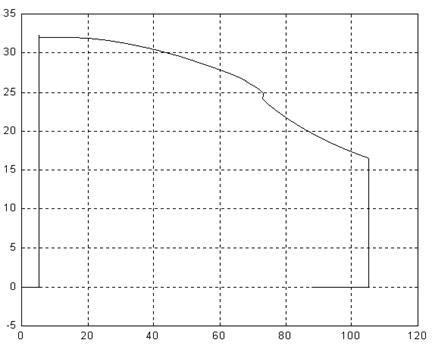
Естественные ЭМХ двигателя представлены на рисунке 9.
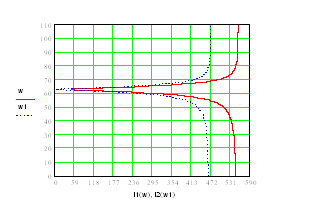
Рисунок 9 - Естественные электромеханические характеристики двигателя
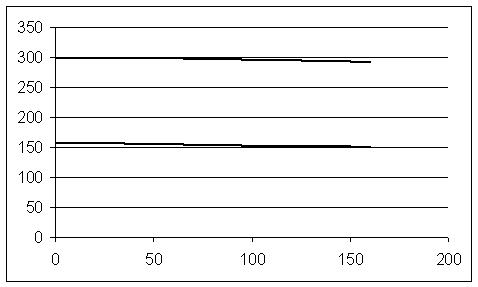
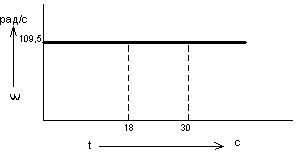
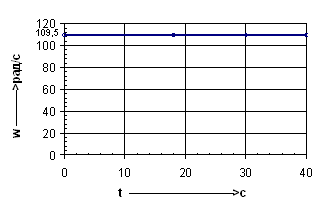
Так как для регулирования скорости применяется ПИ – регулятор (будет показано ниже), который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой.

Рисунок 10 - Механическая характеристика привода
Похожие работы
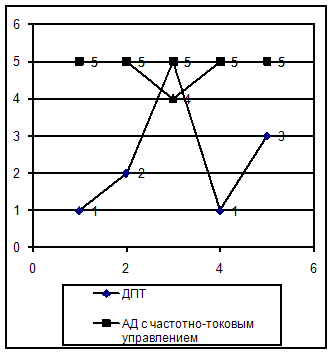
... , кроме того, необходимо учитывать, что приводной двигатель будет обладать достаточно большой мощностью. При анализе литературных источников удалось установить, что в главных электроприводах прокатных станов холодной прокатки применяются две системы: а) УВ – ДПТ; б) Г – Д; Можно также рассмотреть варианты применения следующих систем: в) АД с частотным управлением; г) Каскадная система; д) ...
... фазной сети переменного тока напряжением 380В, частотой 50 Гц. Принимая во внимание полученную расчетную мощность двигателя можно с уверенностью считать, что независимо от системы электропривода, на которой будет реализовываться электропривод лифта, Данные параметры питающей сети могут обеспечить требуемое качество. В электроприводе лифта управление выполняется из различных мест: 1) из кабины ...
... момент прямопропорционален току. Зависимость между моментом и током можно найти для номинальной точки. А Рисунок 5.2—Электромеханическая характеристика. 6. Расчет переходных процессов в электроприводе за цикл работы Для расчета регуляторов необходимо рассчитать коэффициенты передачи датчиков обратных связей. Будем считать, что датчики линейны и не входят в насыщение. ...
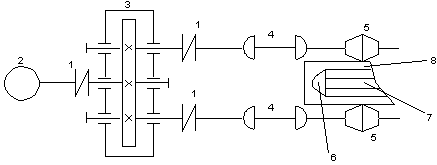
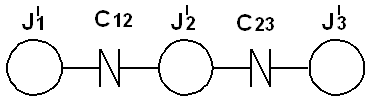
... время прокатки: Н*м, где− статический момент на оси валков; − КПД передач. 1.3 Составление расчетной схемы механической части электропривода Кинематическая схема электропривода прошивного стана трубопрокатного агрегата изображена на рисунке 1.2 Рисунок 1.2− Кинематическая схема установки. На рисунке введены следующие обозначения: 1− муфта; 2− ...
0 комментариев