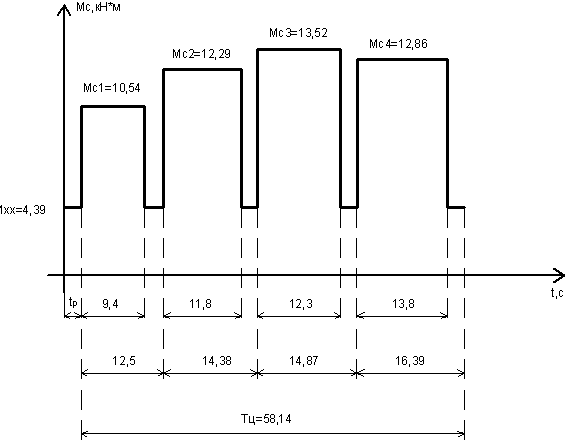
Построение нагрузочной диаграммы и механической характеристики рабочей машины
Расчет силового электропривода
Расчет параметров и выбор силового преобразователя
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет переходных процессов в электроприводе за цикл работы
Навигация
Расчет переходных процессов в электроприводе за цикл работы
Расчет силового электропривода
31450
знаков
1
таблица
16
изображений
6. Расчет переходных процессов в электроприводе за цикл работы
Для получения более простых передаточных функций регуляторов необходимо перейти от двухмассовой расчетной схемы к одномассовой расчетной схеме.
Обоснование перехода к одномассовой расчетной схеме:
- используются только обратные связи по переменным двигателя;
- частота собственных колебаний:
 (42)
(42)
- условие перехода: ![]() .
.
Как показано ниже Т привода составляет 0,0258, тогда ![]() . Тогда условие перехода выполняются (
. Тогда условие перехода выполняются (![]() ) и, следовательно, можно перейти к одномассовой расчетной схеме.
) и, следовательно, можно перейти к одномассовой расчетной схеме.
Суммарный момент инерции одномассовой расчетной схемы будет равен:
![]() .
.
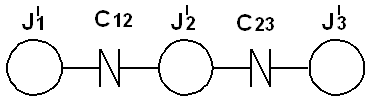
Одномассовая расчетная схема представлена на рисунке 11

Рисунок 11 - Одномассовая расчетная схема
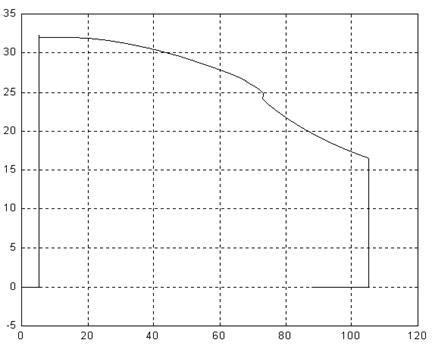
При регулировании зависимость момента допустимого по нагреву двигателя от скорости должна повторять зависимость момента статического от скорости.
Для управления приводом будем использовать двухконтурную систему автоматического регулирования с вольт/частотным управлением с последовательной коррекцией звеньев, с внутренним контуром регулирования момента и внешним контуром регулирования скорости.
При вольт/частотном управлении организуется два канала управления: канал управления частотой питания и канал управления напряжением. Стабилизация скорости осуществляется путем регулирования напряжения в функции частоты и в функции нагрузки.
Рассмотрим канал регулирования частоты.
Разлаживая уравнения динамической механической характеристики в ряд и линеаризуя полученные уравнения в окрестности точки М=0, s=0, получим линеаризованную модель асинхронного двигателя, справедливую для ![]() .
.
Вследствие того, что в асинхронном электроприводе сложно измерять момент двигателя, вместо регулирования момента по отклонению применяют регулирование по возмущению. Т.к. возмущающим воздействием для контура регулирования момента является скорость, то будем вводить положительную обратную связь по скорости, с коэффициентом передачи ![]() .
.
Регулировать скорость двигателя будем по отклонению, вводя отрицательную обратную связь по скорости.
Структурная схема канала регулирования частоты представлена на рисунке 12.
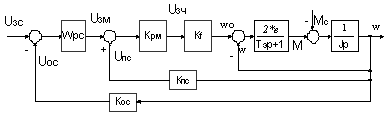
Рисунок 12 - Структурная схема канала регулирования частоты
Рассмотрим контур регулирования момента.
Для статического режима:
![]() (43)
(43)
Нулевая ошибка будет обеспечена, если:
![]()
![]() .(44)
.(44)
Максимальное значение момента двигателя:
![]() .(45)
.(45)
При вольт/частотном управлении с ![]() :
:
![]() (46)
(46)![]() (47)
(47)
Электромагнитная постоянная времени:
![]() (48)
(48)
Жесткость механической характеристики:
![]() (49)
(49)
Коэффициент передачи преобразователя по частоте определяется отношением максимального сигнала на выходе преобразователя к максимальному сигналу на выходе регулятора момента:
![]() .(50)
.(50)
Максимальное значение момента ограничения равно критическому моменту естественной характеристики двигателя:
![]() (51)
(51)
Из уравнения (45) находим Крм:
![]() (52)
(52)
Регулятор момента представляется в виде П – регулятора .
Предельное значение коэффициента усиления обратной связи, обеспечивающее регулирования момента с нулевой ошибкой:
![]() (53)
(53)
Для расчета контура скорости представим контур момента в виде звена:
![]()
![]() (54)
(54)
Обозначив ![]() , получим передаточную функцию оптимизированного контура регулирования момента:
, получим передаточную функцию оптимизированного контура регулирования момента:
![]() (55)
(55)
где ![]()
Структурная схема контура регулирования скорости представлена на рисунке 13
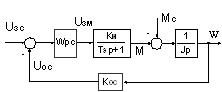
Рисунок 13 – Структурная схема контура регулирования скорости
Коэффициент передачи датчика отрицательной обратной связи по скорости рассчитывается как отношение максимальной скорости на соответствующее напряжение задания:
![]() (56)
(56)
Малой некомпенсируемой постоянной времени контура регулирования скорости является электромагнитная постоянная двигателя, т.е. принимаем ![]() .
.
Большой компенсируемой постоянной времени контура регулирования скорости является механическая постоянная двигателя.
Для получения нулевой ошибки в статике и форсировки переходных процессов в динамике регулятор скорости должен быть ПИ – регулятор.
Настроим регулятор скорости на симметричный оптимум.
Желаемая передаточная функция контура скорости настроенного на симметричный оптимум:
![]() .(57)
.(57)
Передаточная функция объекта регулирования:
![]() (58)
(58)
Разделив желаемую передаточную функцию контура скорости, на передаточную функция объекта регулирования получим передаточную функцию регулятора скорости:
![]() (59)
(59)
где![]() ,
,
![]() ;(60)
;(60)
![]() ;
;
![]() .
.
Для того чтобы убрать перерегулирование, по заданию необходимо на входе контура скорости поставить фильтр с постоянной времени ![]() и следующей передаточной функцией:
и следующей передаточной функцией:
![]() (61)
(61)
Расчет переходных процессов производятся в пакете Matlab.
В модели будем использовать одномассовую консервативную расчетную схему привода.
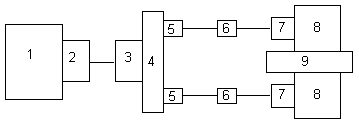
Модель привода представлена на рисунке 14.
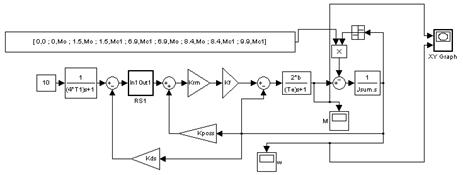
Рисунок 14 – Модель привода
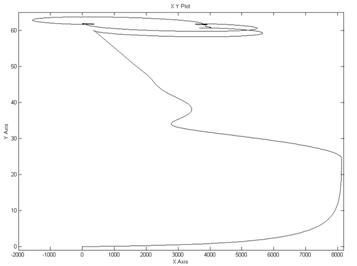
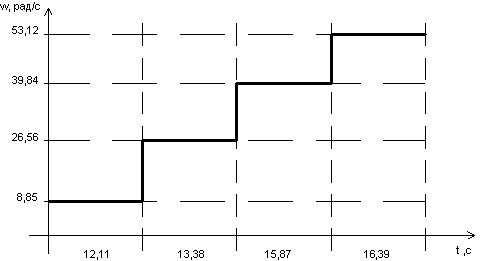
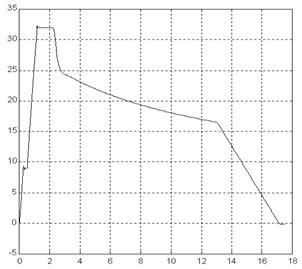
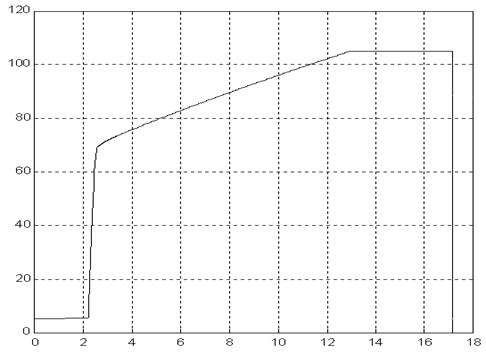
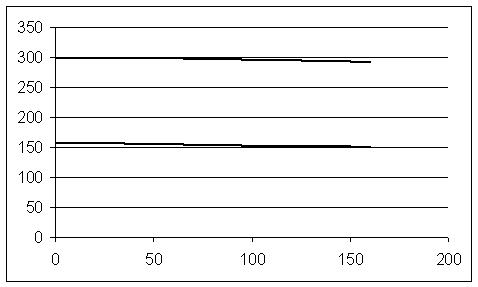
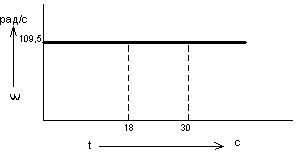
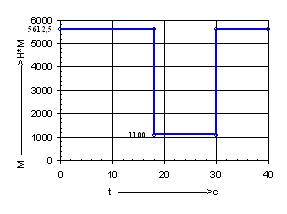
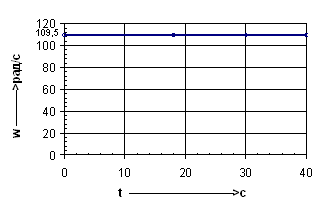
Графики переходных процессов – момента электромагнитного двигателя и скорости первой массы, приведенные к валу двигателя - представлены на рисунках 15, 16.
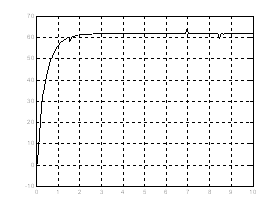
Рисунок 15 – График переходного процесса скорости первой массы
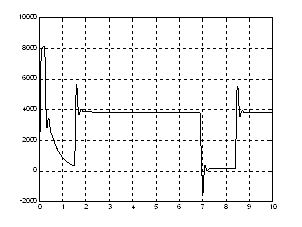
Рисунок 16 – График переходного процесса электромагнитного момента
В результате моделирования получили, что перерегулирование скорости составляет:
![]()
7. Проверка правильности расчета мощности и окончательный выбор двигателя
Проверку правильности расчета мощности выполним методом средних потерь.
Полные номинальные потери в двигателе равны:
![]() (62)
(62)
Переменные номинальные потери в двигателе равны:
 (63)
(63)
Тогда постоянные потери будут равны:
![]() (64)
(64)
Средние потери за цикл работы равны:
 (65)
(65)
где![]() - потери в i-й момент времени,
- потери в i-й момент времени,
![]() - коэффициент ухудшения охлаждения при работе со скоростью
- коэффициент ухудшения охлаждения при работе со скоростью ![]() ,
,
Тц=6.9 с – время цикла.
Потери в i-й момент времени можно определить из следующего выражения:
![]() ,(66)
,(66)
где![]() ,
,
![]() - степень загрузки двигателя.
- степень загрузки двигателя.
Или
 .(66’)
.(66’)
Подставляя (66’) в (65) получим:
 (67)
(67)
Используя выражения (67) найдем средние потери за цикл работы.
Для нахождения средних потерь по формуле (67) воспользуемся моделью привода.
Сначала возводим в квадрат момент электромагнитный двигателя. Потом делим полученное значение на квадрат номинального момента и прибавляем ![]() . Затем интегрируем полученное значение и умножаем на
. Затем интегрируем полученное значение и умножаем на ![]() , получаем значение средних потерь за цикл работы.
, получаем значение средних потерь за цикл работы.
Модель для нахождения средних потерь за цикл работы представлена на рисунке 17.
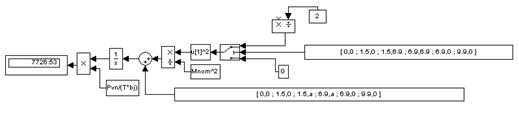
Рисунок 17 - Модель для нахождения средний потерь за цикл работы
В результате моделирования было получено, что средние потери за цикл работы равны:
![]() .
.
Тогда коэффициент загрузки двигателя составляет:
![]() (68)
(68)
Таким образом, двигатель загружен на 80% (70%<80%<100%), следовательно, оставляем выбранный двигатель.
Похожие работы
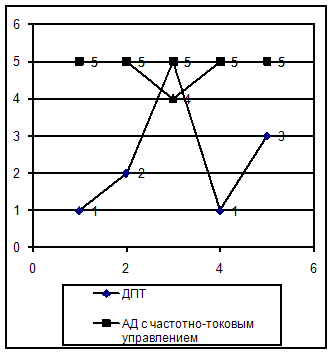
... , кроме того, необходимо учитывать, что приводной двигатель будет обладать достаточно большой мощностью. При анализе литературных источников удалось установить, что в главных электроприводах прокатных станов холодной прокатки применяются две системы: а) УВ – ДПТ; б) Г – Д; Можно также рассмотреть варианты применения следующих систем: в) АД с частотным управлением; г) Каскадная система; д) ...
... фазной сети переменного тока напряжением 380В, частотой 50 Гц. Принимая во внимание полученную расчетную мощность двигателя можно с уверенностью считать, что независимо от системы электропривода, на которой будет реализовываться электропривод лифта, Данные параметры питающей сети могут обеспечить требуемое качество. В электроприводе лифта управление выполняется из различных мест: 1) из кабины ...
... момент прямопропорционален току. Зависимость между моментом и током можно найти для номинальной точки. А Рисунок 5.2—Электромеханическая характеристика. 6. Расчет переходных процессов в электроприводе за цикл работы Для расчета регуляторов необходимо рассчитать коэффициенты передачи датчиков обратных связей. Будем считать, что датчики линейны и не входят в насыщение. ...
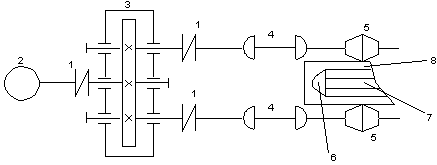
... время прокатки: Н*м, где− статический момент на оси валков; − КПД передач. 1.3 Составление расчетной схемы механической части электропривода Кинематическая схема электропривода прошивного стана трубопрокатного агрегата изображена на рисунке 1.2 Рисунок 1.2− Кинематическая схема установки. На рисунке введены следующие обозначения: 1− муфта; 2− ...
0 комментариев