Построение нагрузочной диаграммы и механической характеристики рабочей машины
Расчет силового электропривода
Расчет параметров и выбор силового преобразователя
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет переходных процессов в электроприводе за цикл работы
Навигация
Построение нагрузочной диаграммы и механической характеристики рабочей машины
Расчет силового электропривода
31450
знаков
1
таблица
16
изображений
1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины
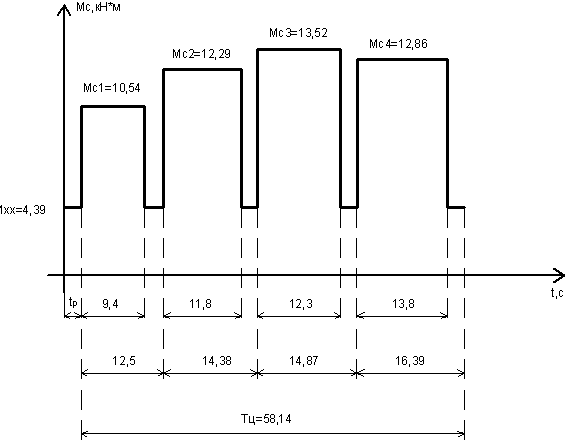
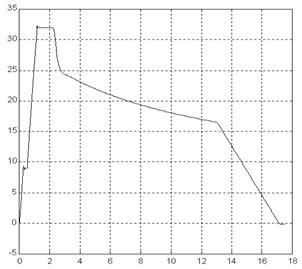
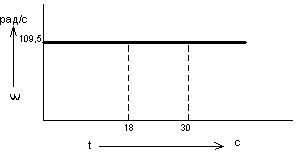
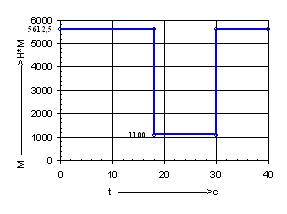
Нагрузочная диаграмма механизма представляет собой зависимость приведенного к валу двигателя момента в функции времени за цикл работы.
Рабочий цикл представляет собой чередование работы привода при движении листа и холостая работа машины до начала следующего цикла работы. Строим упрощенную нагрузочную диаграмму рабочей машины, которая строится по рассчитанным для каждого участка цикла работы статическим нагрузкам, то есть без учета динамических нагрузок. Динамические нагрузки не входят в цикл работы, так как машина работает с постоянной скоростью.
Упрощенная нагрузочная диаграмма имеет вид:
- на интервале холостого хода момент равен моменту холостого хода;
- на интервале правки момент равен сумме моментов статического на оси рабочих валков, приведенного к валу двигателя и холостого хода.
Нагрузочная диаграмма представлена на рисунке 5.
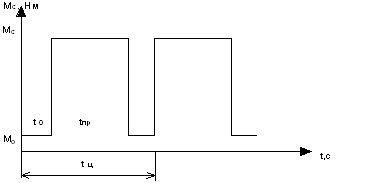
Рисунок 5 – Нагрузочная диаграмма механизма
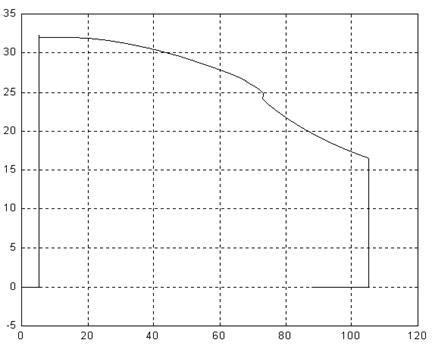
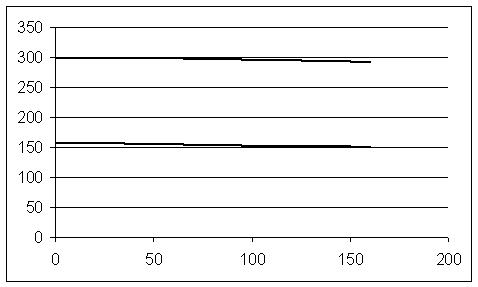
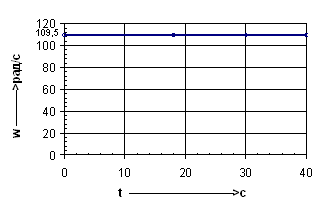
Механическая характеристика рабочей машины есть зависимость приведенного статического момента от скорости вала двигателя. Согласно заданию эта зависимость близка к параболической.
Механическая характеристика рабочей машины представлена на рисунке 6.
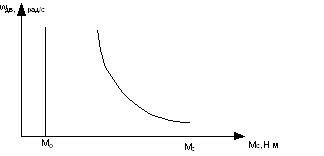
Рисунок 6 – Механическая характеристика рабочей машины
2. Анализ и описание системы «электропривод—сеть» и «электропривод— оператор»
Электропривод листоправильного стана получает питание от 3-х фазной сети переменного тока частотой 50 Гц, напряжением 380В. Стандартами предусмотрено и допускается изменение напряжения сети ±10% и частоты ±2,5 % (ГОСТ 13109-87). Данное явление вызвано, среди всего прочего, наличием других мощных потребителей энергии в условиях цеха, завода. Это значительно влияет на работу двигателей, накладывает дополнительные требования к организации их работы. При помощи автоматического выключателя QF1 подключаем напряжение на преобразователь частоты. Нажатием кнопки ПУСК привод включается, далее привод работает в автоматическом режиме, для постоянного контроля работы привода оператор не требуется.3. Выбор принципиальных решений
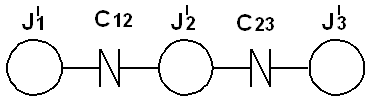
3.1 Построение механической части электропривода
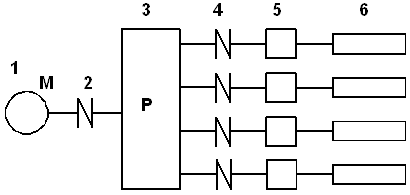
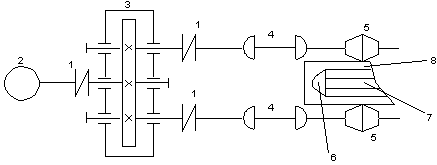
Кинематическая схема главного электропривода листоправильного стана изображена на рисунке 2. Основная операция - правка, производится с помощью вращающихся валков, расположенных в рабочей клети. Верхний рабочий валок перемещается в вертикальной плоскости, а ось нижнего валка находится всегда в неизменном положении.
Передаточные механизмы в раскатном стане состоят из редуктора, шестерной клети, рабочих шпинделей и соединительных муфт.
Редуктор предназначен для того, чтобы при небольших скоростях раскатки получить возможность применение двигателя с относительно большой номинальной скоростью и тем самым снизить габариты и стоимость двигателя и всей установки в целом.
Шпиндели служат для передачи вращения валкам от шестерной клети. Необходимость их применения заключается в том, что с изменением положения верхнего валка изменяется и расстояние между этим валком и шестерной клетью, а также угол между валом шестерной клети и шпинделем.
Муфты применяются для соединения шестерной клети и двигателя с редуктором.
3.2 Выбор типа привода (двигателя)
Основой выбора типа двигателя является технические условия на проектирование привода листоправильного стана:
- продолжительный режим работы;
- ударная нагрузка;
- плавное регулирование скорости в заданном диапазоне.
Выше перечисленным условиям соответствуют следующие приводы:
1 Частотный преобразователь - асинхронный двигатель;
2 Управляемый выпрямитель - двигатель постоянного тока;
3 Каскадная схема;
4 Генератор - двигатель.
3.3 Выбор способа регулирования координат
При выборе способа регулирования координат (скорости) необходимо учитывать энергетический аспект выбора способа регулирования. Это значит, что минимальный габарит двигателя и его полное использование по нагреву имеет место тогда, когда способ регулирования скорости по показанию допустимой нагрузки соответствует зависимости нагрузки от скорости.
Так как механическая характеристика механизма является вязкой нагрузкой, то целесообразно использовать способ регулирования скорости при постоянстве мощности, т.е. регулирование с Р= const. В случае применения такого способа двигателю обеспечивается наилучший тепловой режим.
В системе частотный преобразователь (АИН ШИМ) – асинхронный двигатель необходимая скорость получается путем изменения частоты и формирования напряжения на статоре (вольт частотное управление) либо путем регулирования частоты и формировании вектора основного потокосцепления машины (векторное управление).
В системах управляемый выпрямитель – двигатель постоянного тока и генератор – двигатель необходимая скорость получается путем изменения напряжения питания якоря.
В каскадной схеме регулирование скорости осуществляется путем введения добавочной ЭДС в цепь ротора машины.
3.4 Оценка и сравнение выбранных вариантов
Система генератор – двигатель морально устарела, поэтому при сравнении выбранных вариантов учитываться не будет.
Проведение строгих технико-экономических расчётов не представляется возможным из-за отсутствия требуемых исходных данных, поэтому для оценки и сравнения выбранных вариантов воспользуемся приблизительным методом – “методом экспертных оценок”. Сравнение вариантов решения производится относительно n характеристик системы, важных с точки зрения цели проектирования путём сравнения определённых значений соответствующих показателей качества qi. Показатели качества служат для количественной характеристики степени выполнения требований задания на проектирование электропривода, а также других требований рабочей машины.
Оценку электроприводов будем вести по следующим показателям качества:
1 - диапазон регулирования;
2 - КПД электропривода;
3 - коэффициент мощности;
4 - массогабаритные показатели;
5 - стоимость электропривода;
6 - надежность электропривода;
7 - ресурс работы;
8 - затраты на эксплуатацию;
9 - точность регулирования;
Оценим выполнение требований к i-ой характеристике системы по следующему критерию:
5 - требования к i-ой характеристике системы выполнено очень хорошо;
qi = 4 - требования к i-ой характеристике системы выполнено хорошо;
3 - требования к i-ой характеристике системы выполнено удовлетворительно;
2 - требования к i-ой характеристике системы выполнено неудовлетворительно.
Системы ПЧ – АД и УВ – ДПТ с обратной связью по скорости обеспечивают очень большой диапазон регулирования, поэтому требования к диапазону регулирования выполняются очень хорошо. В каскадной схеме диапазон ограничивается мощностью преобразователя, т.е. при увеличении диапазона мощность преобразователя становится больше мощности двигателя, поэтому требования к диапазону регулирования выполняются удовлетворительно.
КПД приводов мощностью ![]() достаточно высок, поэтому требования к КПД привода выполняются очень хорошо.
достаточно высок, поэтому требования к КПД привода выполняются очень хорошо.
Требования к коэффициенту мощности во всех приводах выполняются хорошо.
Массогабаритные показатели привода определяются массогабаритными показателями двигателя и преобразователя. Современные приводы ПЧ – АД и УВ – ДПТ имеют очень хорошие массогабаритные показатели, поэтому требования к массогабаритным показателям привода выполняются очень хорошо, а каскадная схема имеет несколько худшие массогабаритные показатели, поэтому требования к массогабаритным показателям привода выполняются хорошо.
Требование к стоимости в приводах УВ – ДПТ и каскадной схемы выполняется очень хорошо, а в приводе ПЧ – АД несколько хуже в связи тем, что стоимость ПЧ – АД несколько выше стоимости УВ – ДПТ и каскадной схеме.
Асинхронный двигатель с короткозамкнутым ротором не имеет коллекторного узла и щеточных контактов, поэтому требования к надежности и ресурсу работы выполняются очень хорошо. В каскадной схеме двигатель не имеет коллекторного узла, но имеет щеточный контакт, поэтому требования к надежности и ресурсу работы выполняются хорошо. Двигатель постоянного тока имеет коллекторный узел, поэтому требования к надежности выполняются неудовлетворительно, а при надлежащем уходе за коллектором требования к ресурсу работы выполняются удовлетворительно.
Привод ПЧ – АД не требует эксплуатационных затрат, поэтому требования к эксплуатационным затратам выполняются очень хорошо. В каскадной схеме необходима периодическая проверка щеточных контактов, поэтому требования к эксплуатационным затратам выполняются хорошо. В приводе УВ – ДПТ необходим более частый осмотр коллекторного узла, а также периодическая чистка щеток, поэтому требования к эксплуатационным затратам выполняются удовлетворительно.
В приводе УВ – ДПТ требования к точности регулирования выполняются очень хорошо. В приводе ПЧ – АД требования к точности регулирования выполняются хорошо. В каскадной схеме требования к точности регулирования выполняются удовлетворительно.
Выбор варианта в качестве наилучшего зависит от того, насколько равноправными являются характеристики системы, т.е. нужно оценить их значимость. Для этого вводятся весовые коэффициенты λi, которые можно определить следующим образом:
5 - i-я характеристика системы имеет определяющее значение для цели разработки;
4 - -“- очень большое, но не определяющее значение;
li= 3 - -“- важное;
2 - -“- желательно учесть;
1 - -“- несущественно для цели разработки.
Задачей электропривода является совершение полезной работы с минимумом потерь, поэтому КПД электропривода имеет определяющее значение.
Потребление реактивной мощности из сети нормируется, (за превышение нормы предприятию приходится платить штраф), поэтому коэффициент мощности имеет определяющее значение.
Так как листоправильный стан является агрегатом непрерывного действия и невынужденный простой его приводит к огромным убыткам, поэтому надежность и ресурс работы имеют определяющее значение.
Согласно заданию привод должен обеспечить относительно небольшой диапазон регулирования, поэтому этот показатель качества не имеет очень большого и определяющего значения и его можно охарактеризовать как важный.
Стоимость имеет очень большое значение. Однако, как известно, стоимость тесно связана с качеством, поэтому такой показатель как стоимость имеет большое, но не определяющее значение.
Обычно на металлургических предприятиях имеются помещения достаточные для размещения стана, поэтому массогабаритные показатели стана не имеет очень большого и определяющего значения. Однако с увеличение массы стана увеличивается и его стоимость, поэтому этот показатель можно охарактеризовать как важный.
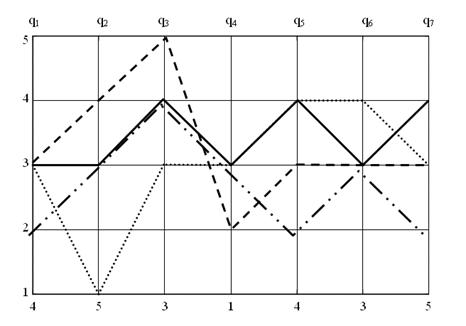
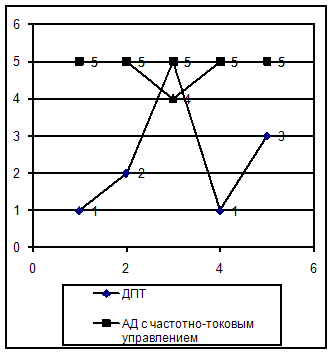
Оценочная диаграмма представлена на рисунке 7.
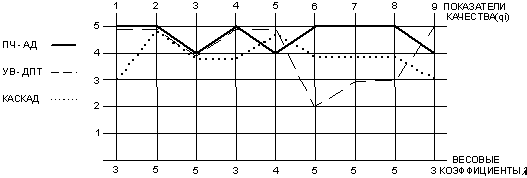
Рисунок 7 – Оценочная диаграмма (показатели качества: 1 - диапазон регулирования; 2 – КПД электропривода; 3 - коэффициент мощности; 4 - массогабаритные показатели; 5 - стоимость электропривода; 6 - надежность электропривода; 7 - ресурс работы; 8 - затраты на эксплуатацию; 9 - точность регулирования)
Выбор наилучшего решения производится определением взвешенной суммы, (лучший вариант имеет большую сумму) по формуле:
![]() (20)
(20)
где![]() - показатель качества;
- показатель качества;
![]() - весовой коэффициент;
- весовой коэффициент;
![]() - взвешенная сумма.
- взвешенная сумма.
Определим взвешенные суммы:
![]() ;
;
![]() ;
;
![]() ;
;
В результате получаем, что максимальную взвешенную сумму имеет следующий привод: преобразователь частоты – асинхронный двигатель.
Следовательно, данный привод и подлежит дальнейшему расчету.
Похожие работы
... , кроме того, необходимо учитывать, что приводной двигатель будет обладать достаточно большой мощностью. При анализе литературных источников удалось установить, что в главных электроприводах прокатных станов холодной прокатки применяются две системы: а) УВ – ДПТ; б) Г – Д; Можно также рассмотреть варианты применения следующих систем: в) АД с частотным управлением; г) Каскадная система; д) ...
... фазной сети переменного тока напряжением 380В, частотой 50 Гц. Принимая во внимание полученную расчетную мощность двигателя можно с уверенностью считать, что независимо от системы электропривода, на которой будет реализовываться электропривод лифта, Данные параметры питающей сети могут обеспечить требуемое качество. В электроприводе лифта управление выполняется из различных мест: 1) из кабины ...
... момент прямопропорционален току. Зависимость между моментом и током можно найти для номинальной точки. А Рисунок 5.2—Электромеханическая характеристика. 6. Расчет переходных процессов в электроприводе за цикл работы Для расчета регуляторов необходимо рассчитать коэффициенты передачи датчиков обратных связей. Будем считать, что датчики линейны и не входят в насыщение. ...
... время прокатки: Н*м, где− статический момент на оси валков; − КПД передач. 1.3 Составление расчетной схемы механической части электропривода Кинематическая схема электропривода прошивного стана трубопрокатного агрегата изображена на рисунке 1.2 Рисунок 1.2− Кинематическая схема установки. На рисунке введены следующие обозначения: 1− муфта; 2− ...
0 комментариев