Навигация
Типовые статические нагрузки электропривода
63522
знака
0
таблиц
19
изображений
1. Типовые статические нагрузки электропривода
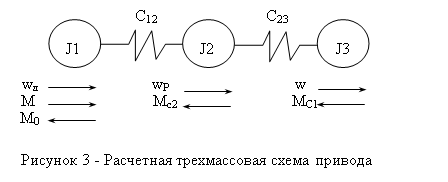
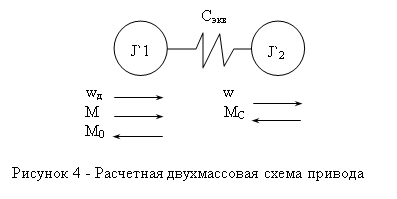
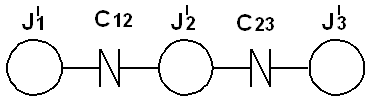
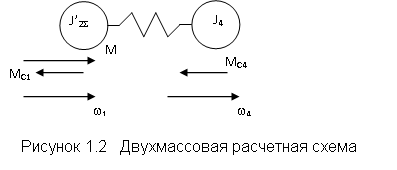
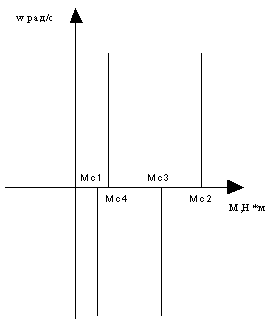
Электромагнитный момент двигателя является выходной величиной для электрической части системы (см. рис.В.2) и входной для механической, поэтому при рассмотрении процессов в системе он выделен из всех действующих на механическую часть внешних моментов. Все остальные силы и моменты определяют статическую нагрузку электропривода Mс. Во всех трех расчетных схемах (рис.1.2) в соответствии с (1.13) эта нагрузка неизменна, так как для двухмассовой системы Mc1 + Мс2=Mс, а для трехмассовой Mс1 + Мс2 + Mс3=Mс. Иными словами, при учете упругости суммарная нагрузка неизменна, но уточняется, к каким массам системы приложены отдельные составляющие нагрузки.
Все силы и моменты нагрузки, приложенные к механической части электропривода, делятся на силы и моменты механических потерь и силы и моменты, представляющие полезные нагрузки исполнительного механизма. Для схемы рис 1.1,б в общем виде можно записать
Mc=DMS+Mпол.S (1.14)
где –
суммарный приведенный момент потерь, с учетом момента механических потерь в двигателе; р, q - число моментов и сил в системе, представляющих механические потери, Мпол.S- суммарный приведенный момент полезной нагрузки.
Полезная нагрузка является одним из главных факторов, связывающих электропривод с технологическим процессом приводимого в движение механизма Силы и моменты полезной нагрузки в различных механизмах имеют различный характер Для возможности обобщенного учета их влияния необходимо их классифицировать, выделив ограниченное число типовых нагрузок.
Так как для электропривода имеет важное значение, как зависит момент статической нагрузки от скорости, в дальнейшем используется понятие механической характеристики исполнительного механизма, представляющей собой зависимости Mс=f(w) и w=f(Mс).
По характеру взаимодействия с электроприводом все силы и моменты делятся на активные и реактивные
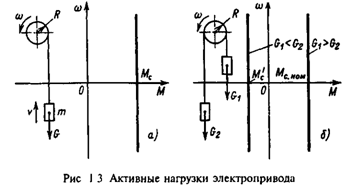
Активными силами и моментами называются силы и моменты, создаваемые внешними по отношению к двигателю источниками механической энергии независимо от движения электропривода, например потенциальной энергией перемещаемых по вертикали грузов, энергией ветра и т.п. На рис.1.3,a упрощенно показан подъемный механизм, нагрузкой которого является приведенный момент силы тяжести груза G:
![]()
где g - ускорение силы тяжести; т - масса груза.
Сила тяжести как при подъеме, так и при спуске груза направлена в одну сторону - в сторону спуска и неизменна по значению. Соответственно механическая характеристика исполнительного механизма w=f(Mс) в этом случае имеет вид прямой Мс=const (рис.1.3,а). Момент Mс в соответствии с (1.15) зависит от массы поднимаемого или опускаемого груза и может изменяться в пределах от Mс=0 (G=0) до Mс=Мс ном, соответствующего номинальной грузоподъемности (G=Gном).
Более широкие пределы изменения активной нагрузки характерны для уравновешенных подъемных механизмов. На рис.1.3,б показаны упрощенная схема такого механизма и соответствующие зависимости w=f(Mс) В данном случае:
M=(G1-G2)·R=g·(m-m2)·R. (1.16)
Очевидно, что в таком механизме при G2=const знак нагрузки электропривода при данном направлении скорости будет зависеть от массы m1 поднимаемого груза G1. При m1=m]HOM МС=МСном>0, так как G1>G2. При том же направлении скорости w>0 в случае m1=0 знак нагрузки в соответствии с (1.14) изменяется. Физически это означает, что по мере уменьшения массы груза m1 тормозной момент нагрузки электропривода уменьшается, при G1=G2 становится равным нулю и при дальнейшем уменьшении m1(G1>G2) двигатель должен перейти в тормозной режим, подтормаживая опускающийся груз G2, (рис.1.3,б). При изменении знака скорости w<0 (спуск груза G1) при m1=m1ном двигатель должен работать в тормозном режиме, опуская груз G1, а при m1=0 - в двигательном режиме, поднимая груз G2.
Реактивными силами и моментами называются силы и моменты сопротивления движению, возникающие как реакция на активный движущий момент, развиваемый двигателем, либо любой другой активный движущий момент, например обусловленный силой тяжести или силой инерции. Эти нагрузки всегда действуют в направлении, противоположном движению электропривода, и изменяют свое направление при изменении знака скорости.
Таким образом, все реактивные силы и моменты зависят от скорости. По характеру этой зависимости различают нагрузки типа сухого трения, типа вязкого трения и вентиляторного типа.
Силы и моменты сухого трения неизменны по модулю, но скачком изменяют свой знак при изменении знака скорости
Мс=|Mc| sign w. (1.17)
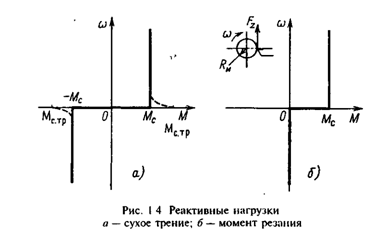
Характеристика w=f(Mс) для нагрузки типа сухого трения показана на рис.1.4,a. В реальных механизмах эта характеристика может иметь более сложный вид из-за того, что в момент трогания силы трения могут превышать их значения при движении. Эта особенность реальных сил и моментов сухого трения отмечена на рис.1.4,a штриховыми линиями и значениями момента трогания ±Мс тр.
Реактивные нагрузки, возникающие при различных технологических процессах обработки, могут иметь одно направление, скачком изменяя свое значение до нуля при изменении знака скорости. Примером может служить показанная на рис.1.4,б зависимость момента резания от скорости при обработке изделия резцом, как схематически это показано на рисунке. Значение статического момента при этом пропорционально усилию резания FZ.
Mc=Fz·Rи
где Rи - радиус изделия.
Силы и моменты вязкого трения линейно зависят от скорости:
Mс=bвт·w, (1.18)
где bвт - коэффициент пропорциональности (рис.1.5,a).
Нагрузка электропривода типа вязкого трения (1.18) на практике встречается редко, чаще всего ее можно наблюдать в виде слабой линейной составляющей в нагрузке типа сухого трения. Существенное влияние на динамические процессы в механической системе оказывают силы внутреннего вязкого трения, пропорциональные скорости деформации валов, канатов, муфт и других элементов. Момент внутреннего вязкого трения можно записать в виде (см. рис 1.2,б)
Mвт=bвт(w1-w2) (1.19)
где w1 и w2 - скорости на входе и выходе деформируемого элемента; bвт - коэффициент пропорциональности.
По характеру влияния на механические колебания в механике все силы и моменты делятся на консервативные и диссипативные.
 |
Консервативными называются силы и моменты, при воздействии которых на систему не происходит поглощения энергии колебаний. Такими являются силы, не зависящие от скорости, в частности сила тяжести, работа которой за период колебаний скорости всегда равна нулю. Диссипативными называются силы и моменты, при воздействии которых на систему происходит поглощение энергии колебаний. Вязкое трение является примером диссипативной силы (момента), так как в соответствии с (1.18) при изменении знака скорости изменяется и знак момента, а механическая мощность сохраняет положительный знак, что соответствует поглощению энергии колебаний. Реально на практике распространенными являются нагрузки, зависящие от скорости в более высокой степени:

Mс=bмехw" (1.20)
При n=2 нагрузка называется вентиляторной (рис.1.5,б). Такой зависимостью нагрузки от скорости обладают центробежные вентиляторы. Для ряда механизмов показатель степени n>2; например такую характеристику имеют центробежные насосы, работающие на противодавление.
Существенное влияние на динамические процессы оказывают нагрузки, являющиеся периодической функцией угла поворота рабочего органа механизма. В приведенной схеме они зависят от утла поворота двигателя, например
Mc=Mmax Sin w. (1.21)
Причиной возникновения таких нагрузок являются особенности технологического процесса. Их появление можно представить себе, если в механической схеме резания, приведенной на рис.1.4,б, предположить, что заготовка имеет в сечении овальную форму. Появление периодических нагрузок могут вызывать нелинейные кинематические связи типа кривошипно-шатунных, кулисных и других механизмов, у которых периодической функцией угла поворота двигателя является радиус приведения r1j.
Во всех случаях, когда скорость двигателя при работе с такими нагрузками изменяется мало и приближенно может быть принята постоянной, для упрощения анализа периодические нагрузки рассматривают как функции времени:
![]()
где wсp - средняя за период колебаний нагрузки скорость электропривода; k - коэффициент пропорциональности, связывающий частоту колебаний нагрузки с угловой скоростью двигателя.
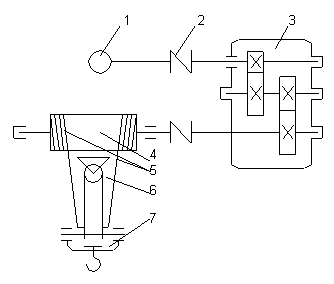
Нагрузки реальных электроприводов обычно содержат в качестве составляющих рассмотренные типовые нагрузки. Так, в нагрузке электропривода реальной подъемной лебедки, кроме показанной на рис.1.3,а, активной составляющей, содержится момент потерь в двигателе и передачах, который имеет вид момента сухого трения со слабой вентиляторной составляющей, обусловленной наличием самовентиляции двигателя.
При вычислении приведенного статического момента Мс формулы (1.13) и (1.14) удобны для использования в тех случаях, когда все действующие в механизме силы и моменты определены. Обычно потери на трение в механизме неизвестны, и для их учета используется КПД механизма
hмех=h1·h2·h3….,
где h1, h2, h3 - КПД элементов кинематической цепи.
Если известен полезный момент нагрузки механизма Mмех, то для прямого направления энергии приведенный к валу двигателя момент статической нагрузки может быть определен из равенства
![]()
Следовательно,
![]()
![]()
где DM - момент механических потерь в двигателе; i0=w1/wмех=i1i2i3…- общее передаточное число от двигателя к рабочему органу механизма. При обратном направлении потока энергии, когда нагрузка является активной, движущей и двигатель должен работать в тормозном режиме, уравнение баланса мощностей с помощью КПД передач можно записать так:
![]()
В этом случае
Момент механических потерь в двигателе невелик, составляет 1-5% номинального момента двигателя, причем большие значения его соответствуют двигателям небольшой мощности. Если значение DM определить трудно, его можно ориентировочно оценить по этим данным. Во многих практических случаях в (1.24) и (1.26) полагают DM=0, так как точность определения момента Mмех невелика, и он рассчитывается с некоторым запасом, при этом формулы приведения момента статической нагрузки к валу двигателя принимают вид:
для прямого направления передачи энергии (двигательный режим работы двигателя)
![]()
для обратного (тормозной режим работы двигателя)
![]()
Если рабочий орган движется поступательно, уравнение баланса мощностей при прямом направлении потока энергии, принимая DМ=0, можно записать так:
![]()
Откуда
![]()
Соответственно для обратного направления потока механической энергии
![]()
Необходимо иметь в виду, что КПД передач зависит от нагрузки, а для червячного зацепления - и от направления передачи энергии, поэтому при расчетах для правильного определения Мс следует использовать соответствующие зависимости hмех от полезной нагрузки передач.
Похожие работы
... В результате получаем, что максимальную взвешенную сумму имеет следующий привод: преобразователь частоты – асинхронный двигатель. Следовательно, данный привод и подлежит дальнейшему расчету. 4. Расчет силового электропривода 4.1 Расчет параметров и выбор двигателя Расчетный режим работы двигателя – длительный с переменной нагрузкой, так как в процессе работы двигателя паузы отсутствуют ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... , кроме того, необходимо учитывать, что приводной двигатель будет обладать достаточно большой мощностью. При анализе литературных источников удалось установить, что в главных электроприводах прокатных станов холодной прокатки применяются две системы: а) УВ – ДПТ; б) Г – Д; Можно также рассмотреть варианты применения следующих систем: в) АД с частотным управлением; г) Каскадная система; д) ...
... рабочей машины. Характеристики представлены на рисунке 1.4. Рисунок 1.4 – Механические характеристики рабочей машины 2. Анализ и описание системы “Электропривод - сеть” и “Электропривод - оператор” Электропривод механизма подъема мостового крана питается стандартным трехфазным напряжением 380 В частотой 50 Гц. В промышленной сети возможны значительные броски напряжения, а также ...
0 комментариев