Навигация
Динамические нагрузки электропривода
63522
знака
0
таблиц
19
изображений
5. Динамические нагрузки электропривода
Правые части уравнений движения электропривода представляют собой моменты действующих в системе сил инерции. В отличие от рассмотренных выше моментов статической нагрузки электропривода, которые являются внешними воздействиями и не зависят от ускорений масс системы, силы и моменты сил инерции пропорциональны ускорениям масс:
![]()
Такие силы и моменты в теории электропривода принято называть динамическими силами и моментами. Уравнение движения приведенного жесткого механического звена определяет суммарную динамическую нагрузку электропривода
которая при принятом правиле знаков численно равна результирующему моменту М-Мс, приложенному к движущимся массам.
Динамический момент является важной составляющей полной нагрузки электропривода. Он представляет собой алгебраическую величину, знак которой при ускорении системы совпадает со знаком скорости, а при замедлении противоположен знаку скорости. При ускорении системы динамический момент является тормозным, и двигатель, преодолевая этот момент, совершает работу, затрачиваемую на увеличение запаса кинетической энергии системы. При замедлении системы, напротив, динамический момент является движущим Освобождающаяся при снижении скорости кинетическая энергия расходуется на совершение работы по преодолению результирующего момента М-Mс, который в этом случае является тормозным.
Как правило, для конкретных производственных механизмов бывает задано требуемое время пуска или расчетное ускорение eгр. Наибольший возможный статический и наибольший требуемый динамический моменты определяют максимум полной нагрузки и соответственно наибольшее значение электромагнитного момента двигателя, которое он должен создавать в процессе работы электропривода:
![]()
Значения Мmax определяют кратковременные перегрузки двигателя, которые не должны превышать допустимой перегрузочной способности двигателя.
Результирующий момент М-Мс (1.68) при пуске частично затрачивается на ускорение ротора двигателя и связанных с его валом элементов, а в остальной части через передачи воздействует на массы механизма, вызывая их ускорение и совершая работу по увеличению запасенной в них кинетической энергии. Следовательно, динамическая нагрузка при пуске увеличивает полную нагрузку передач на значение динамического момента механизма J2·eср (см. рис.1.9):
![]()
При J2>>J1 это увеличение может быть значительным, а при J2<J1 основной нагрузкой передач является статическая нагрузка. Во всех случаях динамические нагрузки передач и элементов кинематической цепи механизма могут существенно дополнительно увеличиваться при возникновении в системе упругих механических колебаний.
Правильное определение нагрузок передач и других элементов кинематической цепи механизма имеет важное практическое значение. Нагрузки механического оборудования определяют его износ, причем наиболее неблагоприятно влияние нагрузок, содержащих знакопеременную составляющую. Поэтому ограничение максимальных нагрузок и уменьшение динамических колебательных нагрузок, обусловленных упругими связями, обеспечивают повышение надежности и долговечности механической части привода и механизма.
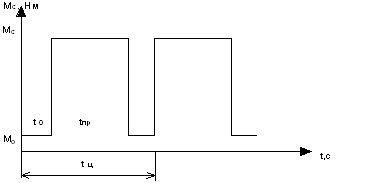
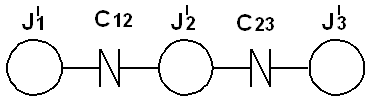
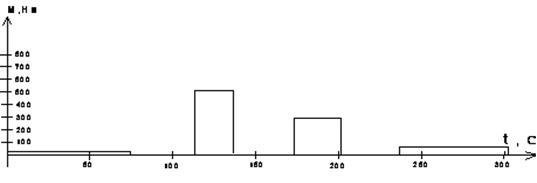
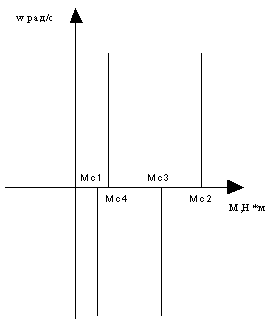
Динамические нагрузки механического оборудования в реальных установках в значительной мере возрастают из-за ударов, возникающих при выборе зазоров в передачах и сочленениях рабочего оборудования машин. С учетом кинематических зазоров расчетная двухмассовая схема механической части принимает вид, показанный на рис.1.28,а. В связи с наличием зазора Df3 зависимость М12=f(f1-f2) становится нелинейной и имеет вид, показанный на рис.1.28,б. Уравнения движения для этой системы на основании (1.40) запишутся при р=d/dt так:
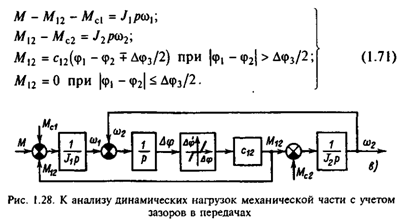
Структурная схема механической части, соответствующая (1.71), представлена на рис.1.28,в. Рассматривая (1.71) и рис.1.28,в, можно установить, что при разомкнутом зазоре массы системы движутся независимо. Так как при этом М12=0, (1.71) при М=М1=const принимает вид:

Как следствие, к моменту соударения масс скорости w1 и w2 могут оказаться существенно разными. Так, при реактивном Мс2 на первом этапе пуска (М12=0) скорость w2 остается равной нулю, а скорость w1 быстро увеличивается, так как М1>Мс1. К моменту окончания выбора зазоров она успевает нарасти до значения
![]()
где e1в.з=(М1-Мс1)J1 - ускорение при выборе зазоров.
Уравнение (1.74) записано для наиболее тяжелого случая выбора полного зазора, когда начальное значение Df на рис.1.28,б соответствует точке 1, а заканчивается выбор зазора в точке 2.
При реактивном характере момента Mc2 после выбора зазора скорость w2 будет оставаться равной нулю до тех пор, пока момент М12, возрастая, не превысит значения Мс2. За время нарастания момента М12 до Мс2 скорость w1 дополнительно увеличивается до значения w1нач, которое в конечном счете и определит динамическую нагрузку передач после трогания второй массы.
Из физических соображений можно заключить, что накопленная за время выбора зазора первой массой кинетическая энергия J1w12нач/2 должна при ударе реализоваться в дополнительных динамических нагрузках передач. Для количественного анализа получим зависимость М12=f(t) для третьего этапа процесса, когда |ф1 - ф2|>Dф3/2 + Mc2/c12.
На третьем этапе уравнения (1.71) можно представить в виде
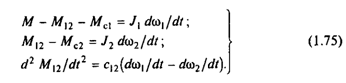
Для получения дифференциального уравнения системы, решенного относительно М12, умножим первое уравнение на с12/J2 а второе на с12/J2 и произведем вычитание второго из первого. При этом с учетом третьего уравнения правая часть становится равной d2M12/dt2, и после преобразований полученное уравнение можно записать так:

где
![]()
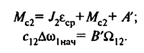
С учетом проведенного анализа предыдущих этапов выбора зазоров решение (1.76) следует искать при следующих начальных условиях:
![]()
Общее решение уравнения с учетом определяемого правой частью частного решения и корней p1,2=±jW12 запишем в виде
![]()
Для определения коэффициентов А и В' используем начальные условия:
Следовательно,
![]()
где
![]()
После преобразований получим

где
![]()
В соответствии с (1.79) максимум нагрузки передач в рассматриваемом переходном процессе определяется соотношением

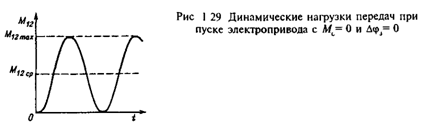
Анализируя (1.80), можно установить, что динамические нагрузки, обусловленные упругими колебаниями, существенно увеличивают нагрузки передач. При отсутствии колебательной составляющей в (1.79) момент нагрузки передач в процессе пуска равен М12ср=J2eср+Мс2. За счет упругих колебаний в соответствии с (1.8(5) нагрузка возрастает, и ее превышение над средней нагрузкой называется динамическим коэффициентом:

 |
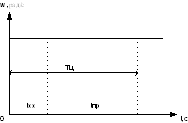
При пуске с предварительно выбранными зазорами и Мс2=0 (Dw1нач=0) динамический коэффициент kдин=2, т. е. упругие колебания вдвое увеличивают рабочие нагрузки передач (рис.1.29). При наличии зазоров (Dw1нач¹0) максимум нагрузок возрастает и может достигать опасных для механической прочности передачзначений. Если подставить в (1.81) выражение eср, W12 и обозначить, как выше принято, JS/J1=g, коэффициент динамичности можно записать так:
Нетрудно видеть, что динамические коэффициенты, обусловленные упругими ударами, при выборе зазоров тем больше, чем больше момент инерции ротора двигателя и жестко с ним связанных элементов J1 и чем больше жесткость механической связи.
При Dw1нач¹0 упругость передач является фактором, снижающим динамические ударные нагрузки. В этом можно убедиться, подставив в (1.82) значение с12=¥, - ему соответствуют бесконечно большие динамические коэффициенты, т. е. разрушающие нагрузки передач. Однако и при реальных конечных значениях с12 удары при выборе зазоров могут создавать недопустимые нагрузки или существенно увеличивать износ механического оборудования. В этих случаях при проектировании электропривода предусматриваются законы управления, обеспечивающие повышение плавности выбора зазоров и снижение ударных нагрузок до допустимых значений путем ограничения достигаемой при выборе зазоров скорости Dw1нач.
Динамические колебательные процессы в среднем не влияют на длительность переходных процессов пуска, реверса и торможения электропривода. Однако они во многих случаях отрицательно сказываются на условиях выполнения технологических операций, особенно на точности работы установки. Практически всегда возникающие упругие колебания увеличивают динамические нагрузки механического оборудования и ускоряют его износ, т. е. являются одним из факторов, определяющих надежность, долговечность и производительность машин.
Динамический коэффициент является важной характеристикой условий работы механического оборудования, а его значения определяются, главным образом, динамическими свойствами электропривода. При проектировании и наладке электроприводов задача уменьшения динамического коэффициента до значений, близких единице, в связи с изложенным имеет важное практическое значение. Для многих механизмов она определяет выбор структуры, настроек и параметров электропривода и при успешном решении обеспечивает увеличение срока службы механического оборудования.
Похожие работы
... В результате получаем, что максимальную взвешенную сумму имеет следующий привод: преобразователь частоты – асинхронный двигатель. Следовательно, данный привод и подлежит дальнейшему расчету. 4. Расчет силового электропривода 4.1 Расчет параметров и выбор двигателя Расчетный режим работы двигателя – длительный с переменной нагрузкой, так как в процессе работы двигателя паузы отсутствуют ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... , кроме того, необходимо учитывать, что приводной двигатель будет обладать достаточно большой мощностью. При анализе литературных источников удалось установить, что в главных электроприводах прокатных станов холодной прокатки применяются две системы: а) УВ – ДПТ; б) Г – Д; Можно также рассмотреть варианты применения следующих систем: в) АД с частотным управлением; г) Каскадная система; д) ...
... рабочей машины. Характеристики представлены на рисунке 1.4. Рисунок 1.4 – Механические характеристики рабочей машины 2. Анализ и описание системы “Электропривод - сеть” и “Электропривод - оператор” Электропривод механизма подъема мостового крана питается стандартным трехфазным напряжением 380 В частотой 50 Гц. В промышленной сети возможны значительные броски напряжения, а также ...
0 комментариев