ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ ЗНАЧЕНИЙ СТАТИЧЕСКИХ МОМЕНТОВ И МОМЕНТА ИНЕРЦИИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
РАСЧЁТ И ВЫБОР ЭЛЕМЕНТОВ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОПРИВОДА
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ МАКСИМАЛЬНОМ, СРЕДНЕМ И МИНИМАЛЬНОМ ЗНАЧЕНИЯХ СКОРОСТИ ДВИЖЕНИЯ
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Момент и скорость уменьшаются до 0 на характеристики динамического торможения
Момент и скорость уменьшаются до 0 на характеристики динамического торможения
РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ
Навигация
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Электропривод литейного крана по схеме "Преобразователь частоты – асинхронный короткозамкнутый двигатель"
34060
знаков
10
таблиц
9
изображений
6. РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Задача торможения – остановить двигатель. Рекуперативное торможение – такое торможение, при котором происходит отдача энергии в сеть. Такое возможно, например, при скорости вращения ротора больше синхронной. При частотном регулировании для этого ставится второй комплект полупроводниковых приборов, которые работаю в режиме инвертора, и производится понижение частоты питающей сети. Однако окончательно торможение двигателя происходит на характеристике динамического торможения. Для этого статор двигателя отключается от сети а в 2 фазы двигателя подаётся постоянный ток.
Исходные данные – двигатель работал с моментом ![]() со скоростью
со скоростью ![]() .
.
Для определения интенсивности торможения необходимо рассчитать следующее:
Допустимое ускорение:
![]() .
.
Суммарный момент инерции:
![]() .
.
Электромеханическая постоянная времени:
![]() .
.
Максимальный момент при торможении:
![]() .
.
В то же время критический момент характеристики динамического торможения:
![]() .
.
Для максимальной интенсивности критический момент должен быть равен максимальному моменту при торможении:
![]() .
.
Исходя из этого условия, эквивалентный ток динамического торможения равен:
![]() .
.
Построим характеристику динамического торможения:
 .
.
График характеристики динамического торможения. На нём указана:
-искусственная характеристика, на которой работал двигателя,
-максимальный статический момент,
-максимальный момент торможения,
-динамическая характеристика торможения.
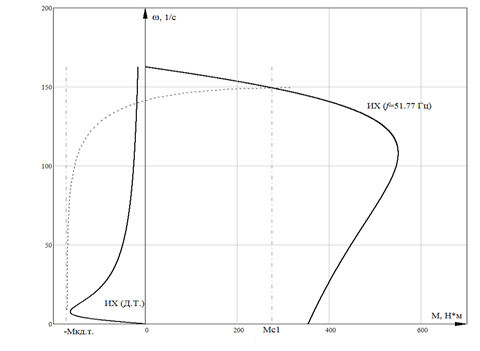
Рисунок 6.1 – Характеристика динамического торможения
7. ОЦЕНКА НЕОБХОДИМОСТИ ПРИМЕНЕНИЯ ОБРАТНОЙ СВЯЗИ ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОЙ СКОРОСТИ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ
Так как привод оснащен частотным регулятором, то его характеристики имеют одинаковую жесткость независимо от частоты. Поэтому можно рассмотреть одну характеристику, например ту, на которой осуществляется подъём груза с максимальной скоростью. В таком случае при изменении момента от ![]() до
до ![]() частота вращения двигателя меняется от
частота вращения двигателя меняется от ![]() до
до ![]() .
.
Абсолютное изменение скорости:
![]() .
.
Относительное изменение скорости:
![]() .
.
Видно, что относительно изменение скорости при изменении момента от 0 до ![]() не превышает 15%. Логично предположить, что при изменении момента от 0 до Mн<Mс1 относительное изменение скорости также не будет превышать 15%. Таким образом можно сделать вывод, что для стабилизации скорости нет необходимости вводить обратную связь с каким бы то ни было коэффициентом усиления.
не превышает 15%. Логично предположить, что при изменении момента от 0 до Mн<Mс1 относительное изменение скорости также не будет превышать 15%. Таким образом можно сделать вывод, что для стабилизации скорости нет необходимости вводить обратную связь с каким бы то ни было коэффициентом усиления.
8. РАСЧЁТ И ПОСТРОЕНИЕ КРИВЫХ ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ, МОМЕНТА И ТОКА ПРИ ПУСКЕ И ОСТАНОВКЕ ЭЛЕКТРОДВИГАТЕЛЯ; ОПРЕДЕЛЕНИЕ ДЛИТЕЛЬНОСТИ ПЕРЕХОДНЫХ ПРОЦЕССОВ
А) Разгон двигателя.
Так как двигатель питается от преобразователя частоты, то есть возможность создать линейный закон изменения выходной величины:
![]() ,
,
где ![]() - допустимое угловое ускорение двигателя.
- допустимое угловое ускорение двигателя.
Чтобы рассчитать его необходимо проделать следующие вычисления:
Пусковой момент:
![]() .
.
Таким образом, допустимое угловое ускорение:
![]() .
.
Очевидно, что выполняется условие ![]() .
.
Разгон двигателя можно разделить на 3 периода:
1.Момент увеличивается до Mc1. Скорость равна 0.
Длительность периода – время запаздывания:
![]()
Момент двигателя:
![]() .
.
Скорость двигателя: ![]() Начальные и конечные значения момента и скорости:
Начальные и конечные значения момента и скорости: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
2.Второй период – момент экспоненциально увеличивается до ![]() , скорость увеличивается линейно.
, скорость увеличивается линейно.
Длительность периода – время ![]() , где
, где ![]() - время, за которое входной сигнал
- время, за которое входной сигнал ![]() увеличивается до
увеличивается до ![]() .
.
![]() .
.
Момент двигателя:
![]() .
.
Скорость:
![]() .
.
Начальные и конечные значения скорости и момента: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
3.Третий период – разгон по искусственной характеристики до установившихся значений скорости и момента. Длительность периода - ![]() . Момент двигателя:
. Момент двигателя:
![]() .
.
Скорость двигателя:
![]() .
.
Начальные и конечные значения скорости и момента: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Полное время разгона:
![]()
Б) Рекуперативное торможение.
При переводе двигателя в режим рекуперативного торможения изменится допустимое угловое ускорение:
![]()
Торможение делится на 2 периода:
1. Момент экспоненциально увеличивается до ![]() , скорость уменьшается линейно.
, скорость уменьшается линейно.
Длительность периода:
![]() .
.
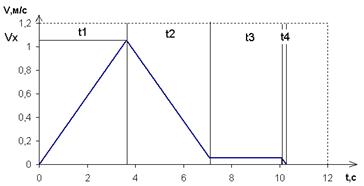
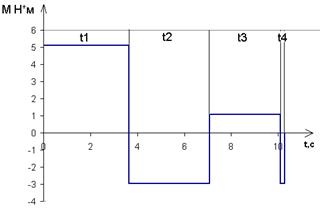
По полученным значениям построим график изменения момента и скорости при разгоне.
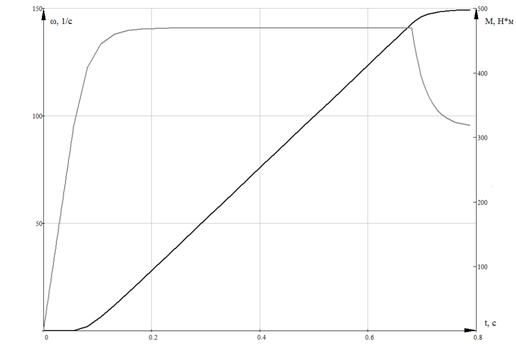
Рисунок 8.1 – График изменения момента и скорости при пуске
Момент двигателя:
![]() .
.
Скорость двигателя:

Начальные и конечные значения скорости и момента: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Похожие работы
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
... управляют последовательностью их действия и обеспечивают отвод жидкости из сливных полостей в бак. Кроме того, распределительные устройства реверсируют гидродвигатели и регулируют их скорость. В гидросистемах строительных машин применяют главным образом золотниковые распределители. По числу присоединенных каналов золотниковые распределители делят на двух-, трех- и четырехходовые. Для управления ...
... сети, тип выбранной КТП, ее комплектацию и компоновку. 3.6 Выбор схемы силовой сети цеха Внутрицеховые сети выполняют по радиальной, магистральной или смешанной схемам. На выбор схемы влияют категория потребителей по надежности электроснабжения, взаимное расположение ЭП по площади цеха, их единичная мощность, связанность электроприемников единым технологическим процессом и характеристика ...
... В помещениях электролизного производства, в том числе на преобразовательной подстанции, должна предусматриваться громкоговорящая и (или) телефонная связь, в соответствии с принятой системой обслуживания на предприятии (опытно-промышленной установке). 7.10.39. Для контроля за режимом работы серии ванн в помещениях корпусов, станций (цехов) электролиза или на преобразовательной подстанции должны ...
0 комментариев